一种水下自主巡航视觉智能监测设备的制作方法
本技术涉及水下监测设备,具体为一种水下自主巡航视觉智能监测设备。
背景技术:
1、我国目前深海养殖环境监测、水下视觉监控装备产品设备约90%依赖国外进口,产品垄断严重,主要集中在挪威、加拿大、美国等国家;我国集成研发的水下视觉产品种类少、精度低且可靠性不足,国产化自主可控产品研发产业发展前景广阔,同时,深海养殖区海洋水产品的生产、繁衍和成长,是深海渔业养殖中最重要的监测项目,利用深海养殖水下智能视觉设备进行长期连续性观测对养殖作业具有重要影响,同时,智能化深远海养殖装备对改变传统渔业养殖模式,提升渔业新旧动能转换,降低依赖人工经验的粗放式管控具有重要的产业发展意义。
2、作为目前鱼类行为学研究的主流技术,水下视觉受到国内外鱼类行为学研究者的高度关注并发展迅速。虽然水下视觉技术在深海养殖中的应用研究多数都是经过实验室验证取得了一定的进展,多数实验是在一定的限定条件下进行的,但是现实中的海水环境都比实验环境要复杂得多,比如水下深度、光照、浊度等,研究成果在实际水下环境中应用的稳定性和实用性仍然需要投入大量的科研力量。
3、根据一项专利号为cn113687041a的中国公开专利,其中指出了一种可下潜式水域监测三体无人船,该引证文件通过激光扫描雷达扫描水面的障碍物,实现无人船的自动避障;摄像头记录水面和水下的实时影像;无线充电接收线圈接收充电的电能,进而实现了自动水面巡航并进行环境监测,还能进行垂直下潜,获取不同水层的传感器数据和水下影像。
4、上述引证专利在实际使用时,为了实现在水下的环境监测和水下影像的记载传输,以无人船的形式对摄影设备进行装载,虽然实现了水下的监测效果,但是其整体设备结构复杂,围护成本较高,同时该文件中的摄像头角度固定,在水下推进时,整体设备受到框架的影响,难以快速实现多角度的摄像记载,观测区域角度固定,只能增加设备数量实现监测区域覆盖,进而造成设备荷载重,难以在深海远洋携带,且进一步增加了携带困难,同时由于深远海水质较好,水质多澄清,适合鱼类生长,但是会在光照下成像呈现蓝绿色,不利于观测,因此,提出一种水下自主巡航视觉智能监测设备解决上述问题。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种水下自主巡航视觉智能监测设备,具备观测角度覆盖面积大、整体设备结构轻巧,便于远洋携带、水下观测视线好等优点,解决了现有水下设备不便于观测、携带、观测视线差的问题。
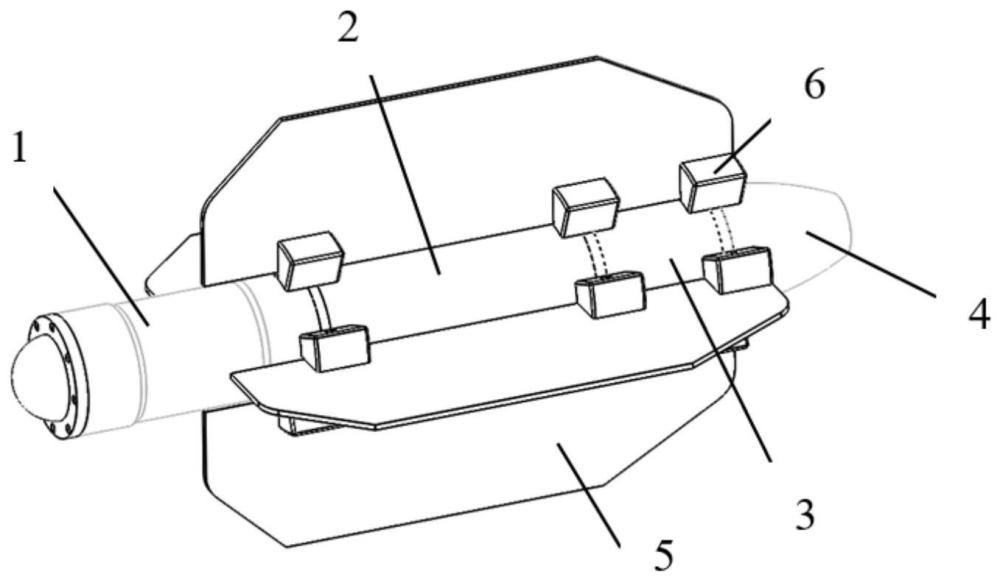
2、为实现上述目的,本实用新型提供如下技术方案:一种水下自主巡航视觉智能监测设备,包括摄像机舱、回转控制舱、升降控制舱、导向壳、翼板;其中
3、所述摄像机舱、回转控制舱、升降控制舱、导向壳之间通过连接肋板依次连接且整体呈流线型;
4、所述摄像机舱由机舱及机舱内的水下视频监测设备构成;
5、所述回转控制舱由电池组和回转机构组成,其用于保证设备整体用电和设备回转姿态控制;
6、所述摄像机舱、回转控制舱、升降控制舱外部沿其圆心环绕设有多组翼板,所述翼板可通过回转控制舱进行回转控制,其运动轨迹为整体沿轴向旋转,通过翼板驱动设备拨水实现运动;
7、所述翼板一端有多组机翼座且通过机翼座完成在摄像机舱、回转控制舱、升降控制舱上的固定。
8、进一步,所述摄像机舱成空心舱体且两端开口,所述摄像机舱一端开口处通过多组316l型螺栓固定有压盖,所述压盖内嵌合设有蓝宝石镜片。
9、进一步,所述摄像机舱内设有固定支撑件和摄像机机芯,所述摄像机机芯通过所述固定支撑件固定,所述摄像机机芯包括用于视频影像记载的监测设备,所述水下视频监测设备用于捕捉水下水质清浊、鱼类行为、设备位置等图像数据,所述固定支撑件上开设径向密封槽,所述径向密封槽内安装设有氟胶密封圈,所述固定支撑件和氟胶密封圈为摄像机机芯提供轴向定位并为摄像机舱提供内部耐压支撑。
10、进一步,所述固定支撑件一端延伸固定有延伸固定件,所述延伸固定件、固定支撑件相连接且两者之间加装直角固定件,所述直角固定件上安装设有电路板,所述电路板上设计有定位和通信模块,所述定位和通信模块用于对设备位置和视频进行数据回传,所述电路板电路板引出导线并连接至所述固定支撑件后端面上,实现与所述摄像机机芯的电位连接,所述延伸固定件后端设计圆环延伸结构定位,嵌套安装在后端盖上,所述后端盖与所述延伸固定件后端面上设计定位及安装孔,用于保证所述摄像机机芯安装角度,所述后端盖前后对称设计,各安装两个径向密封氟胶密封圈,所述后端盖中心开设英制螺纹孔,安装穿舱接插件并连接摄像机主体和后部姿态控制部分及电源部分,所述后端盖后端安装回转控制舱的外壳部分。
11、进一步,所述回转控制舱外壳部分后端连接有连接肋板,所述连接肋板前端安装有电池组,所述电池组的支架前端安装有电机,所述电机的输出轴上安装有回转支架,所述回转支架采用偏心设计,用于保证回转时设备整体姿态随之改变,所述连接肋板前后皆设计径向密封槽,槽内安装氟胶密封圈,所述连接肋板后端安装所述升降控制舱的外壳。
12、进一步,所述升降控制舱的外壳部分后端连接有后端安装有连接肋板,所述连接肋板前端安装升降控制总成,所述升降控制总成包括电机、控制阀、储油罐等,同时,设计油路进出与所述连接肋板穿接,且穿接末端安装有油囊,所述油囊外部安装有导向壳为其提供防护。
13、与现有技术相比,本申请的技术方案具备以下有益效果:
14、该水下自主巡航视觉智能监测设备,其通过回转控制舱内的回转机构的回转控制,配合摄像机舱内的水下视频监测设备的影像数据传输,实现了在远洋深海还环境下的自主巡航,通过其自主巡航设计,增加了设备水下工作的范围和可持续性,其耐腐蚀材料的选择和防漏电等电位设计保证了设备的可靠性,其结构设计和耐压分析满足水下100m使用要求,通过参数化其壁厚尺寸,可满足不同水深使用要求,同时,相较于引证文件的设备而言,综合考虑,本申请的自主巡航监测设备通过其回转系统的控制,减少了深远海领域设备运维中人工维护的频次,增加了水下数据采集的区域范围,降低了整体成本。
技术特征:
1.一种水下自主巡航视觉智能监测设备,其特征在于:
2.根据权利要求1所述的一种水下自主巡航视觉智能监测设备,其特征在于:所述摄像机舱(1)成空心舱体且两端开口,所述摄像机舱(1)一端开口处通过多组316l型螺栓固定有压盖(8),所述压盖(8)内嵌合设有蓝宝石镜片(7)。
3.根据权利要求2所述的一种水下自主巡航视觉智能监测设备,其特征在于:所述摄像机舱(1)内设有固定支撑件(10)和摄像机机芯(9),所述摄像机机芯(9)通过所述固定支撑件(10)固定,所述摄像机机芯(9)包括用于视频影像记载的监测设备,所述水下视频监测设备用于捕捉水下水质清浊、鱼类行为、设备位置的图像数据,所述固定支撑件(10)上开设径向密封槽,所述径向密封槽内安装设有氟胶密封圈(19),所述固定支撑件(10)和氟胶密封圈(19)为摄像机机芯(9)提供轴向定位并为摄像机舱(1)提供内部耐压支撑。
4.根据权利要求3所述的一种水下自主巡航视觉智能监测设备,其特征在于:所述固定支撑件(10)一端延伸固定有延伸固定件(20),所述延伸固定件(20)、固定支撑件(10)相连接且两者之间加装直角固定件,所述直角固定件上安装设有电路板(11),所述电路板(11)上设计有定位和通信模块,所述定位和通信模块用于对设备位置和视频进行数据回传,所述电路板(11)引出导线并连接至所述固定支撑件(10)后端面上,实现与所述摄像机机芯(9)的电位连接,所述延伸固定件(20)后端设计圆环延伸结构定位,嵌套安装在后端盖(12)上,所述后端盖(12)后端安装回转控制舱(2)的外壳部分。
5.根据权利要求4所述的一种水下自主巡航视觉智能监测设备,其特征在于:所述回转控制舱(2)外壳部分后端连接有连接肋板(16),所述连接肋板(16)前端安装有电池组(15),所述电池组(15)的支架前端安装有电机(14),所述电机(14)的输出轴上安装有回转支架(13),所述回转支架(13)采用偏心设计,用于保证回转时设备整体姿态随之改变,所述连接肋板(16)前后皆设计径向密封槽,槽内安装氟胶密封圈(19),所述连接肋板(16)后端安装所述升降控制舱(3)的外壳。
6.根据权利要求5所述的一种水下自主巡航视觉智能监测设备,其特征在于:所述升降控制舱(3)的外壳部分后端连接有后端安装有连接肋板(16),所述连接肋板(16)前端安装升降控制总成(17),所述升降控制总成(17)包括电机、控制阀、储油罐,同时,设计油路进出与所述连接肋板(16)穿接,且穿接末端安装有油囊(18),所述油囊(18)外部安装有导向壳(4)为其提供防护。
技术总结
本技术涉及一种水下自主巡航视觉智能监测设备,属于水下监测设备技术领域,包括摄像机舱、回转控制舱、升降控制舱、导向壳、翼板;所述摄像机舱、回转控制舱、升降控制舱、导向壳之间通过连接肋板依次连接且整体呈流线型,所述回转控制舱由电池组和回转机构组成,其用于保证设备整体用电和设备回转姿态控制。该水下自主巡航视觉智能监测设备,其通过回转控制舱内的回转机构的回转控制,配合摄像机舱内的水下视频监测设备的影像数据传输,实现了在远洋深海环境下的自主巡航,通过其自主巡航设计,增加设备水下工作的范围和可持续性,其耐腐蚀材料的选择和防漏电等电位设计保证了设备的可靠性,其结构设计和耐压分析满足水下100m使用要求。
技术研发人员:刘志刚,张兴凤,王绘忠,崔海朋,赵巍,陆文超,凌德超,许奕东
受保护的技术使用者:青岛杰瑞工控技术有限公司
技术研发日:20230919
技术公布日:2024/5/9
- 还没有人留言评论。精彩留言会获得点赞!