一种清洁机器人的制作方法
本技术实施例涉及清洁设备,特别是涉及一种清洁机器人。
背景技术:
1、水面清洁机器人是一种自动清洁设备,其能够智能规划行驶路径,根据规划的路径漂浮行驶于水面,在行驶过程中,将水面漂浮的碎屑、树叶等垃圾回收至内置的垃圾篮,从而清洁水面。
2、然而,在实现本实用新型实施例的过程中,发明人发现:目前,当水面清洁机器人的垃圾篮收集满之后,需要人工将垃圾篮取出清理垃圾,然而,现有的水面清洁器人没有提示用户清理垃圾的功能,需要用户不定期检查垃圾篮的垃圾是否已装满,降低用户的使用体验。
技术实现思路
1、本实用新型主要解决的技术问题是提供一种清洁机器人,当检测组件检测垃圾篮的垃圾已装满,提示件会发出提示,提示用户需要清理垃圾篮的垃圾,无需用户不定期检查垃圾篮的垃圾是否已装满,提升用户的使用体验。
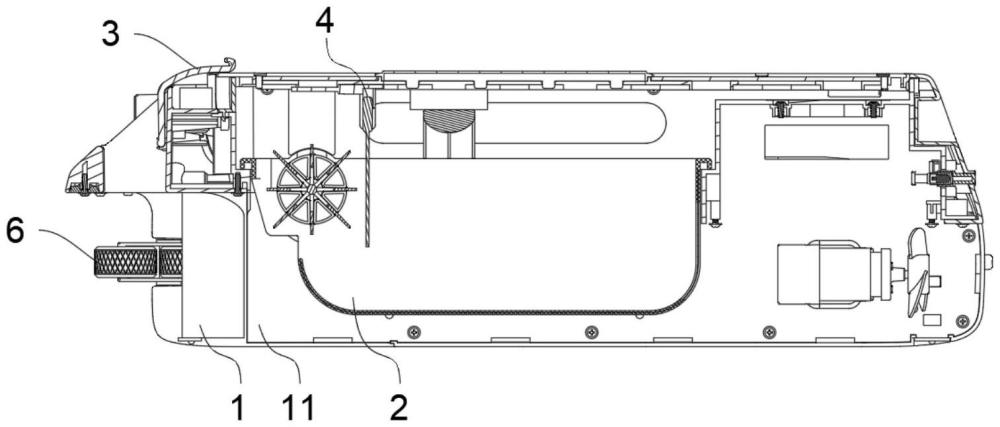
2、为解决上述技术问题,本实用新型采用的一个技术方案是:提供一种清洁机器人,包括机器人本体、回收机构、上盖组件、检测组件和提示件,所述机器人本体设置有收容槽和回收口,所述回收口与所述收容槽连通,所述回收机构包括垃圾篮和叶轮组件,所述垃圾篮活动收容于所述收容槽,所述垃圾篮设置有连通口,所述连通口与所述回收口连通,所述叶轮组件转动连接于所述垃圾篮,所述叶轮组件用于转动,以将垃圾甩进所述垃圾篮,所述上盖组件铰接于所述机器人本体,并且所述上盖组件盖设于所述回收机构,所述检测组件设置于所述上盖组件,所述检测组件用于检测所述垃圾篮是否装满垃圾,所述提示件固定于所述机器人本体。
3、可选的,所述上盖组件包括上盖,所述检测组件包括活动件和检测件,所述活动件转动连接于所述上盖,所述活动件邻近所述叶轮组件远离所述回收口的一侧,所述检测件固定于所述上盖,所述检测件用于检测所述活动件是否在预设第一位置。
4、可选的,所述活动件包括转轴、拨片和活动片,所述转轴转动连接于所述上盖,所述拨片连接于所述转轴,所述拨片伸入所述垃圾篮,所述活动片连接于所述转轴,所述检测件用于检测所述活动片是否在预设第一位置。
5、可选的,所述上盖组件包括连接板,所述连接板固定于所述上盖面向所述垃圾篮的表面,所述连接板设置有转孔,所述转轴转动连接于所述转孔。
6、可选的,所述上盖组件包括视窗,所述上盖设置有视窗口,所述视窗固定于所述视窗口。
7、可选的,所述上盖组件包括压持件,所述压持件固定于所述上盖面向所述垃圾篮的表面,所述压持件抵持于所述垃圾篮。
8、可选的,所述上盖组件包括卡接件,所述卡接件铰接于所述机器人本体,所述卡接件抵持于所述上盖背离所述垃圾篮的表面。
9、可选的,所述叶轮组件包括叶轮和驱动件,所述叶轮转动连接于所述垃圾篮内,所述叶轮邻近所述连通口,所述驱动件固定于所述机器人本体,所述驱动件与所述叶轮连接。
10、可选的,所述叶轮组件包括第一齿轮和第二齿轮,所述第一齿轮连接于所述叶轮,所述第二齿轮连接于所述驱动件,所述第一齿轮与所述第二齿轮啮合。
11、可选的,所述清洁机器人包括两个滚轮组件,所述两个滚轮组件相对转动连接于所述机器人本体前部的两侧。
12、本实用新型实施例中,清洁机器人包括机器人本体、回收机构、上盖组件、检测组件和提示件,所述机器人本体设置有收容槽和回收口,所述回收口与所述收容槽连通,所述回收机构包括垃圾篮和叶轮组件,所述垃圾篮活动收容于所述收容槽,所述垃圾篮设置有连通口,所述连通口与所述回收口连通,所述叶轮组件转动连接于所述垃圾篮,所述叶轮组件用于转动,以将垃圾甩进所述垃圾篮,所述上盖组件铰接于所述机器人本体,并且所述上盖组件盖设于所述回收机构,所述检测组件设置于所述上盖组件,所述检测组件用于检测所述垃圾篮是否装满垃圾,所述提示件固定于所述机器人本体。当检测组件检测垃圾篮的垃圾已装满,提示件会发出提示,提示用户需要清理垃圾篮的垃圾,无需用户不定期检查垃圾篮的垃圾是否已装满,提升用户的使用体验。
技术特征:
1.一种清洁机器人,其特征在于,包括:
2.根据权利要求1所述的清洁机器人,其特征在于,
3.根据权利要求2所述的清洁机器人,其特征在于,
4.根据权利要求3所述的清洁机器人,其特征在于,
5.根据权利要求2所述的清洁机器人,其特征在于,
6.根据权利要求2所述的清洁机器人,其特征在于,
7.根据权利要求1-6任意一项所述的清洁机器人,其特征在于,
8.根据权利要求1所述的清洁机器人,其特征在于,
9.根据权利要求8所述的清洁机器人,其特征在于,
10.根据权利要求1所述的清洁机器人,其特征在于,
技术总结
本技术实施例涉及清洁设备技术领域,尤其公开了一种清洁机器人,包括机器人本体、回收机构、上盖组件、检测组件和提示件,机器人本体设置有收容槽和回收口,回收口与收容槽连通,回收机构包括垃圾篮和叶轮组件,垃圾篮活动收容于收容槽,垃圾篮设置有连通口,连通口与回收口连通,叶轮组件转动连接于垃圾篮,上盖组件铰接于机器人本体,并且上盖组件盖设于回收机构,检测组件设置于上盖组件,提示件固定于机器人本体。通过上述方式,本技术实施例能够通过检测组件检测垃圾篮已装满垃圾,提示件发出提示,提示用户需要清理垃圾篮的垃圾,无需用户不定期检查垃圾篮的垃圾是否已装满,提升用户的使用体验。
技术研发人员:陈箫迪,刘汉军,陈斌
受保护的技术使用者:深圳华芯信息技术股份有限公司
技术研发日:20231115
技术公布日:2024/7/23
- 还没有人留言评论。精彩留言会获得点赞!