一种水下巡检机器人的制作方法
本技术涉及水下巡检,尤其涉及一种水下巡检机器人。
背景技术:
1、这里的陈述仅提供与本实用新型相关的背景技术,而不必然地构成现有技术。
2、当涉及水下管道巡查时,传统的人工潜水巡检受到了诸多限制,如狭窄的工作空间、有限的潜水时间、复杂的水下环境等。因此,为了弥补这些局限性,水下巡检机器人应运而生,成为水下管道巡查的理想替代方案。
3、水下巡检机器人是一种能够在水下环境中执行巡检任务的无人遥控机器人,它可以通过搭载各种传感器和摄像设备,获取丰富的水下信息,并将其传回操作人员。由于机器人体积相对较小且灵活机动,它能够轻松进入狭窄的管道和水下设施,实现全方位的巡查工作。
4、水下巡检机器人的优势在于它不受时间和空间的限制,能够长时间、连续地工作,对水下管道进行全面的检查。同时,机器人还能避免人员面临的危险和风险,提高工作效率和安全性。通过远程操控和实时数据传输,操作人员可以准确把握巡检进程,并快速做出响应。
5、常见水下机器人推进器布局有六推进器和八推进器,其中,两个或四个推进器调节水下机器人的上浮和下潜,其余推进器调节水下机器人的前进、后退及转向。这样的布局方式,需要通过多个不同的推进器分别进行机器人不同行进方向的调节,结构复杂,且操作麻烦,在水下机器人执行巡检任务时,存在因方向调节不到位造成错检、漏检的情况。
6、此外,常见水下机器人的推进器均设置有裸露在外面的螺旋桨,若是水下环境复杂,则可能会误吸入水草、未降解的垃圾等造成推进器被缠绕锁死,螺旋桨锁死会对水下机器人的动力输出、控制能力、稳定性和电量消耗产生负面影响,严重时可能会造成水下机器人失联,这样不仅无法完成相应任务,还会消耗大量人力物力去打捞机器人本体。
技术实现思路
1、针对现有技术存在的不足,本实用新型实施例的目的是提供一种水下巡检机器人,采用四推进器动力布局,结合齿轮电机组进行推进器方向的调节,进而实现水下巡检机器人方向的调节,实现对水下机器人的灵活地、精细化操控。
2、为了实现上述目的,本实用新型实施例提供了如下技术方案:
3、一种水下巡检机器人,包括:
4、机器人本体,
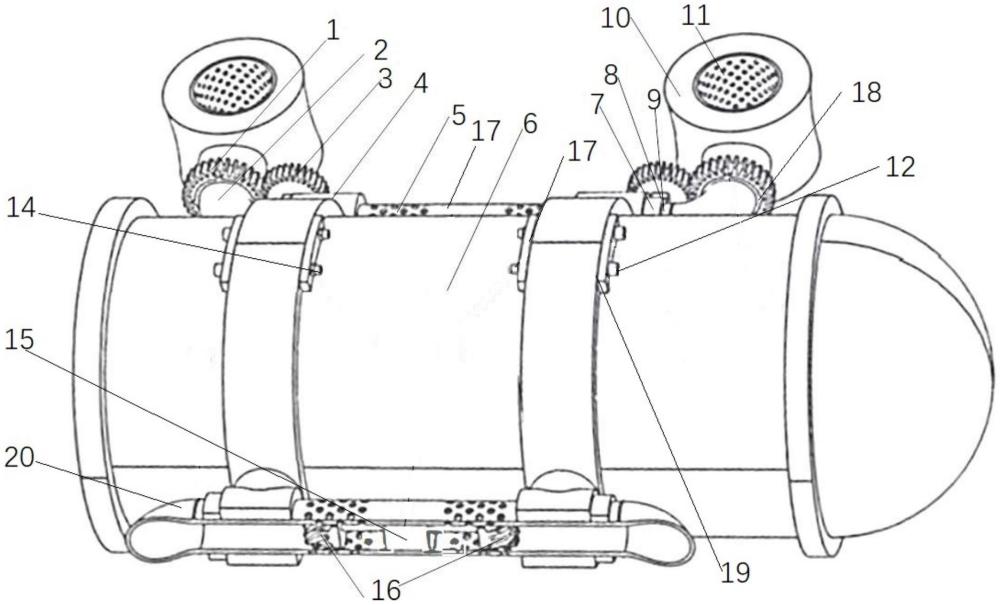
5、推进器单元,所述推进器单元为多个,所述推进器单元设置于所述机器人本体的环周侧,且沿所述机器人本体的中轴线对称分布;所述推进器单元包括多个无桨推进器,所述无桨推进器基于所述机器人本体沿周向的中心截面对称设置;
6、其中,所述无桨推进器传动连接有齿轮电机组;
7、沿所述机器人本体轴向相邻的所述无桨推进器之间连通有增压管,所述增压管开设有多组进水孔,所述增压管内设置有涡轮电机组。
8、进一步的,所述无桨推进器包括推进器腔体、定向喷水网和增压管连接筒;
9、所述推进器腔体沿所述机器人本体的轴向竖直设置,所述定向喷水网设置于所述推进器腔体沿高度方向的一端部,所述推进器腔体的环周侧与所述增压管连接筒的一端部连通,所述增压管连接筒的另一端部与所述增压管的一端部连通。
10、优选的,所述齿轮电机组包括主动齿轮、从动齿轮和电机;
11、所述主动齿轮设置于所述电机的输出端,所述从动齿轮套设于所述增压管连接筒,所述主动齿轮和所述从动齿轮啮合。
12、进一步优选的,所述增压管的两端部分别套设有定位圆环,所述定位圆环的环周侧套设有电机底座,所述电机设置于所述电机底座。
13、进一步的,所述涡轮电机组包括涡轮电机和涡轮桨叶,所述涡轮电机位于所述增压管的中部,所述涡轮桨叶设置于所述涡轮电机的两侧,且所述涡轮桨叶靠近所述进水孔。
14、进一步的,所述机器人本体的环周侧套设有固定架,所述固定架的环周侧设置有多个固定卡扣,所述固定卡扣套设于所述增压管的端部。
15、优选的,所述固定架包括固定箍、固定贴片和防松螺母组,所述固定贴片设置于所述机器人本体的环周侧,所述固定贴片的一端部开设有第一定位孔,所述固定贴片的另一端部开设有第二定位孔;
16、所述固定箍的一端部设置于所述第一定位孔内,且通过所述防松螺母组固定;所述固定箍的另一端部绕所述机器人本体一周后设置于所述第二定位孔内,且通过所述防松螺母组固定。
17、进一步的,多组所述进水孔沿所述增压管周向的中心截面对称设置;
18、一组所述进水孔包括多个进水孔,多个所述进水孔沿所述增压管的环周侧均匀分布。
19、进一步的,还包括控制器,所述控制器分别与所述齿轮电机组和所述涡轮电机组通信连接。
20、优选的,所述控制器为stm32f4微控制器。
21、本实用新型实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
22、1、本实用新型提供的技术方案,采用无桨推进器,改善桨叶被杂物缠绕的问题。
23、2、本实用新型提供的技术方案,通过加装齿轮电机组为推进器的方向调节提供动力,通过改变电机的转速和转向,通过主动齿轮带动从动齿轮,进而带动推进器围绕增压管轴向转动,实现水下机器人的方向调节;通过涡轮电机组对经进水孔流入增压管内的水进行涡轮增压,经过涡轮增压的水通过定向喷水网从一侧涌出提供上升或者快速下降的动力;进而实现水下机器人的灵活操纵。
技术特征:
1.一种水下巡检机器人,其特征在于,包括:
2.如权利要求1所述的水下巡检机器人,其特征在于,所述无桨推进器包括推进器腔体、定向喷水网和增压管连接筒;
3.如权利要求2所述的水下巡检机器人,其特征在于,所述齿轮电机组包括主动齿轮、从动齿轮和电机;
4.如权利要求3所述的水下巡检机器人,其特征在于,所述增压管的两端部分别套设有定位圆环,所述定位圆环的环周侧套设有电机底座,所述电机设置于所述电机底座。
5.如权利要求1所述的水下巡检机器人,其特征在于,所述涡轮电机组包括涡轮电机和涡轮桨叶,所述涡轮电机位于所述增压管的中部,所述涡轮桨叶设置于所述涡轮电机的两侧,且所述涡轮桨叶靠近所述进水孔。
6.如权利要求1所述的水下巡检机器人,其特征在于,所述机器人本体的环周侧套设有固定架,所述固定架的环周侧设置有多个固定卡扣,所述固定卡扣套设于所述增压管的端部。
7.如权利要求6所述的水下巡检机器人,其特征在于,所述固定架包括固定箍、固定贴片和防松螺母组,所述固定贴片设置于所述机器人本体的环周侧,所述固定贴片的一端部开设有第一定位孔,所述固定贴片的另一端部开设有第二定位孔;
8.如权利要求1所述的水下巡检机器人,其特征在于,多组所述进水孔沿所述增压管周向的中心截面对称设置;
9.如权利要求1所述的水下巡检机器人,其特征在于,还包括控制器,所述控制器分别与所述齿轮电机组和所述涡轮电机组通信连接。
10.如权利要求9所述的水下巡检机器人,其特征在于,所述控制器为stm32f4微控制器。
技术总结
本技术公开了一种水下巡检机器人,属于水下巡检技术领域。该水下巡检机器人包括机器人本体和推进器单元,推进器单元为多个,推进器单元设置于机器人本体的环周侧,且沿机器人本体的中轴线对称分布;推进器单元包括多个无桨推进器,无桨推进器基于机器人本体沿周向的中心截面对称设置;无桨推进器传动连接有齿轮电机组;沿机器人本体轴向相邻的无桨推进器之间连通有增压管,增压管开设有多组进水孔,增压管内设置有涡轮电机组。能够为推进器方向的调整提供动力,且改善推进器被杂物缠绕的问题,解决了需要多设置推进器调节水下机器人方向的问题。
技术研发人员:高中昊,管玉朋,赵莹,李放,孙文青,王宪芳,李光明,田建伟,宋建辉
受保护的技术使用者:山东水发黄水东调工程有限公司
技术研发日:20231120
技术公布日:2024/7/29
- 还没有人留言评论。精彩留言会获得点赞!