一种无人水下滑翔机自动回收投放装置
本技术涉及无人水下滑翔机,具体为一种无人水下滑翔机自动回收投放装置。
背景技术:
1、水下滑翔机回收投放装置是一种用于自动回收和投放水下滑翔机的设备,主要组成为:抓取机构控制系统、传感器、电源系统、机械结构和防护;它通过机械结构和控制系统,实现对水下滑翔机的准确抓取和释放操作,提高对无人水下滑翔机的复用和任务执行能力,适应水上环境复杂性和任务需求的多样性;通过合理的设计和可靠的控制,这种装置能够使水下滑翔机在执行任务之后更加灵活和高效地进行回收和投放,提高整体的任务执行能力。
2、近年来国内外水下滑翔机技术得到长足发展,在军事和民用领域的应用也越来越广泛,因此自动投放、回收的装置是无人艇进行海洋探测工作的关键技术和装备;但目前水下滑翔机海上布放回收作业一直是依靠繁重的人工作业来完成,现有的船舶平台对于无人艇的投放和回收操作十分繁琐,多为悬吊转移投放,需要大量人员参与,且设备的占用空间较大,使用不便;为实现水下滑翔机的深入推广应用,亟需一种专门布放与回收水下滑翔机的装置来代替繁重的人工布放和回收作业,不仅有利于保证设备的安全,而且能够降低水下滑翔机的运行成本。
3、所以我们提出了一种无人水下滑翔机自动回收投放装置,以便于解决上述中提出的问题。
技术实现思路
1、本实用新型的目的在于提供一种无人水下滑翔机自动回收投放装置,以解决上述背景技术提出的目前市场上无人水下滑翔机自动回收投放装置,回收机构使用不够方便且投放机构使用效果较差的问题。
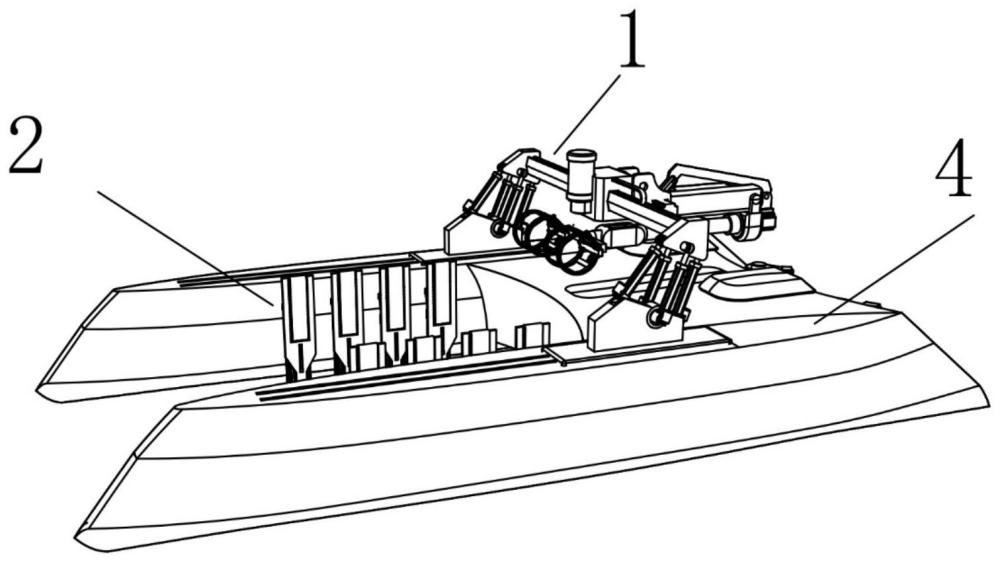
2、为实现上述目的,本实用新型提供如下技术方案:一种无人水下滑翔机自动回收投放装置,包括龙门和机械臂本体;
3、所述龙门固定在船体上方,且龙门上方固定连接有机械臂本体,所述龙门的后方设置有履带式存储舱,且履带式存储舱设在船体内部,并且船体上固定安装有托举打捞装置,所述履带式存储舱的后方设置有导轨存储舱,且导轨存储舱设在船体内部,并且船体底部安装有矢量高压水泵推进装置。
4、作为本实用新型的优选技术方案,所述龙门底部连接龙门底座,且龙门底座连接有导向轮,且导向轮设置在工字形导轨内部,并且工字形导轨固定在龙门上,所述龙门三个固定连接有龙门液压缸,且龙门液压缸前端和机械臂云台导轨连接,所述机械臂本体通过固定连接和龙门机械臂云台连接,所述机械臂本体和机械臂驱动电机连接,且机械臂本体末端固定连接有机械臂抓手。
5、作为本实用新型的优选技术方案,所述托举打捞装置由多个二级伸缩臂组成,且二级伸缩臂通过滑动连接和一级伸缩臂连接,并且二级伸缩臂通过螺纹连接和伸缩臂丝杆连接,所述伸缩臂丝杆和步进电机连接,所述二级伸缩臂一端内部设置有绳索驱动装置,且绳索驱动装置和托举臂基座连接,并且托举臂基座上方连接有托举平板传送带,所述托举平板传送带设置在托举平板上。
6、作为本实用新型的优选技术方案,所述履带式存储舱内部设置有多个履带式存储舱单元,且履带式存储舱单元两侧固定有压力传感器,所述履带式存储舱内部设置有履带驱动电机,且履带驱动电机通过履带驱动减速器和驱动轮连接,所述履带式存储舱单元内部设置有履带式存储舱履带支撑装置,且履带式存储舱履带支撑装置上方和履带本体连接,所述履带式存储舱单元上方设置有履带式存储舱投放口。
7、作为本实用新型的优选技术方案,所述导轨存储舱内部设置有抓取固定装置和导轨系统导轨,且导轨系统导轨上固定安装有导轨系统和道岔,并且导轨系统导轨上方分布固定有红外线定位装置。
8、作为本实用新型的优选技术方案,所述抓取固定装置底部固定连接有转向架,且转向架底部连接有多个承重轮,并且转向架四周连接有多个导轨系统导向轮,所述导轨系统导向轮和导轨系统电机连接,且导轨系统电机和导轨系统受电梳连接,并且导轨系统电机上方设置有导轨系统固定器,所述导轨存储舱上方设置有导轨舱舱门。
9、作为本实用新型的优选技术方案,所述矢量高压水泵推进装置由推进器本体和转向驱动器组成,且推进器本体和推进器驱动电机连接,并且推进器本体上设置有推进器进水口,所述推进器本体尾部设置有推进器加压缩口,且推进器加压缩口上连接有反推挡板,所述推进器本体前方设置有反推导流器。
10、与现有技术相比,本实用新型的有益效果是:
11、1.该装置设置有回收机构,通过gps,自动运行到目标附近,再通过声纳探测对水下滑翔机进行精确定位,托举打捞装置通过两级滑轨,先将托举平板伸入水中,随后托举平板旋转至水平状态将水下滑翔机从水中托起,通过托举平板传送带将水下滑翔机移动至目标位置,便于机械臂本体抓取,通过龙门上的视觉传感器定位目标水下滑翔机,并以此控制机械臂本体,根据预先设定好的存放位置,
12、2.该装置设置有投放结构,首先通过gps自动运行到目标位置,如果取出位置为履带式存储舱,履带式存储舱会先进行旋转,将要投放的水下滑翔机的舱位转至合适的位置,打开底部的履带式存储舱投放口将其投放入水中,如果目标位置为导轨式存储舱,导轨式存储舱首先将导轨舱舱门打开,之后通过道岔控制改变内部四组抓取固定装置的位置,取出所需水下滑翔机,并由机械臂将其放入水中。
技术特征:
1.一种无人水下滑翔机自动回收投放装置,包括龙门(1)和机械臂本体(1.2);
2.根据权利要求1所述的无人水下滑翔机自动回收投放装置,其特征在于,所述龙门(1)底部连接龙门底座(1.1),且龙门底座(1.1)连接有导向轮,且导向轮设置在工字形导轨内部,并且工字形导轨固定在龙门(1)上,所述龙门(1)三个固定连接有龙门液压缸(1.4),且龙门液压缸(1.4)前端和机械臂云台导轨(1.6)连接,所述机械臂本体(1.2)通过固定连接和龙门机械臂云台(1.3)连接,所述机械臂本体(1.2)和机械臂驱动电机(1.7)连接,且机械臂本体(1.2)末端固定连接有机械臂抓手(1.5)。
3.根据权利要求1所述的无人水下滑翔机自动回收投放装置,其特征在于,所述托举打捞装置(2)由多个二级伸缩臂(2.3)组成,且二级伸缩臂(2.3)通过滑动连接和一级伸缩臂(2.2)连接,并且二级伸缩臂(2.3)通过螺纹连接和伸缩臂丝杆(2.4)连接,所述伸缩臂丝杆(2.4)和步进电机连接,所述二级伸缩臂(2.3)一端内部设置有绳索驱动装置(2.6),且绳索驱动装置(2.6)和托举臂基座(2.7)连接,并且托举臂基座(2.7)上方连接有托举平板传送带(2.5),所述托举平板传送带(2.5)设置在托举平板(2.1)上。
4.根据权利要求1所述的无人水下滑翔机自动回收投放装置,其特征在于,所述履带式存储舱(3)内部设置有多个履带式存储舱单元(3.1),且履带式存储舱单元(3.1)两侧固定有压力传感器,所述履带式存储舱(3)内部设置有履带驱动电机(3.4),且履带驱动电机(3.4)通过履带驱动减速器(3.3)和驱动轮连接,所述履带式存储舱单元(3.1)内部设置有履带式存储舱履带支撑装置(3.2),且履带式存储舱履带支撑装置(3.2)上方和履带本体(3.5)连接,所述履带式存储舱单元(3.1)上方设置有履带式存储舱投放口(3.6)。
5.根据权利要求1所述的无人水下滑翔机自动回收投放装置,其特征在于,所述导轨存储舱(4)内部设置有抓取固定装置(4.2)和导轨系统导轨(4.3),且导轨系统导轨(4.3)上固定安装有导轨系统(4.1)和道岔,并且导轨系统导轨(4.3)上方分布固定有红外线定位装置。
6.根据权利要求5所述的无人水下滑翔机自动回收投放装置,其特征在于,所述抓取固定装置(4.2)底部固定连接有转向架,且转向架底部连接有多个承重轮,并且转向架四周连接有多个导轨系统导向轮(4.2.4),所述导轨系统导向轮(4.2.4)和导轨系统电机(4.2.2)连接,且导轨系统电机(4.2.2)和导轨系统受电梳(4.2.3)连接,并且导轨系统电机(4.2.2)上方设置有导轨系统固定器(4.2.1),所述导轨存储舱(4)上方设置有导轨舱舱门(4.4)。
7.根据权利要求1所述的无人水下滑翔机自动回收投放装置,其特征在于,所述矢量高压水泵推进装置(5)由推进器本体(5.1)和转向驱动器(5.2)组成,且推进器本体(5.1)和推进器驱动电机(5.6)连接,并且推进器本体(5.1)上设置有推进器进水口(5.4),所述推进器本体(5.1)尾部设置有推进器加压缩口(5.5),且推进器加压缩口(5.5)上连接有反推挡板(5.7),所述推进器本体(5.1)前方设置有反推导流器(5.3)。
技术总结
本技术公开了一种无人水下滑翔机自动回收投放装置,涉及无人水下滑翔机技术领域,包括龙门和机械臂本体,龙门固定在船体上方,且龙门上方固定连接有机械臂本体,龙门的后方设置有履带式存储舱,且履带式存储舱设在船体内部,并且船体上固定安装有托举打捞装置,该装置设置有回收机构,通过GPS,自动运行到目标附近,再通过声纳探测对水下滑翔机进行精确定位,托举打捞装置通过两级滑轨,先将托举平板伸入水中,随后托举平板旋转至水平状态将水下滑翔机从水中托起,通过托举平板传送带将水下滑翔机移动至目标位置,便于机械臂本体抓取,通过龙门上的视觉传感器定位目标水下滑翔机,并以此控制机械臂本体,根据预先设定好的存放位置。
技术研发人员:范居正,杨翠怡,阮俊诚,姬天乙,胡波,邓文博,陈吉,甘明俊,张伦瑜,胡忠飛,黄技
受保护的技术使用者:广东海洋大学
技术研发日:20231221
技术公布日:2024/9/17
- 还没有人留言评论。精彩留言会获得点赞!