一种基于CPG控制器的仿生双髻鲨机器人
本发明涉及仿生机器人,尤其是涉及一种基于cpg控制器的仿生双髻鲨机器人。
背景技术:
1、浩瀚的海洋中蕴含有丰富的生物资源、矿产资源和能源,人类在水下环境中进行生产、科研等活动越来越频繁,水下任务的要求也不断提高,人工操作的方式从成本、安全性、效率上逐渐不能满足复杂水下任务的要求。水下机器人作为一种可在水中移动,具有一定感知能力,可辅助或代替人类完成多种任务的高技术装备,在海洋研究、海洋开发、海洋环境保护等领域具有重要的应用价值。
2、水下机器人应用场景广泛,不仅能够在自然环境中执行科研调查,数据收集,地形探测等多个方面的任务。同时后续可以根据需要在其上增加传感器,提供更多方面的数据支持,更全面的环境分析。
3、传统水下机器人通常为螺旋桨驱动,由螺旋桨产生推力,多个螺旋桨相互配合为机器人在水下航行提供动力,这种机构设计对于推进器以巡航速度行驶于空旷平静海域的应用领域是经济有效的,但出于其机动控制力依赖于流体在操控舵面上的流动产生的升力,因此在低速下难以实现机动;此外这类推进器会在尾迹中会产生大量大带宽的噪声,导致一些水下生态系统遭到严重破坏,也就是说,传统螺旋桨推进式水下机器具有噪声大、能量利用率低、环境适应性差、生态不友好等诸多缺点。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于cpg控制器的仿生双髻鲨机器人,以解决传统水下机器人环境适应性差、生态不友好、效率低的问题。
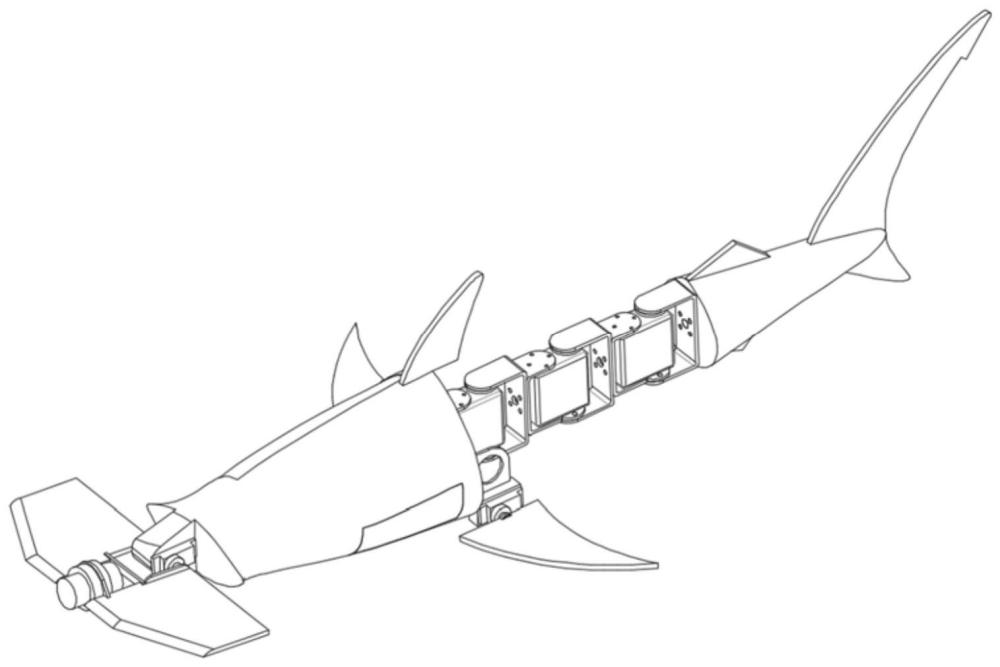
2、本发明的目的可以通过以下技术方案来实现:一种基于cpg控制器的仿生双髻鲨机器人,包括依次连接的锤形头部、本体头部、躯干部和尾部,所述本体头部连接有胸鳍部,所述锤形头部和本体头部内分别设置有测距传感器,所述锤形头部通过头部电机与本体头部相连接,所述本体头部内设置有电源模块和cpg控制器,所述胸鳍部通过侧部电机与本体头部相连接,所述躯干部包括依次相连的第一旋转机构、第二旋转机构和第三旋转机构,所述电源模块用于提供电能给测距传感器、头部电机、侧部电机、cpg控制器、第一旋转机构、第二旋转机构和第三旋转机构;
3、所述cpg控制器接收测距传感器采集的数据信号,并相应控制头部电机、侧部电机、第一旋转机构、第二旋转机构和第三旋转机构的工作状态。
4、进一步地,所述锤形头部包括片状结构的锤形主体,所述锤形主体的一端与头部电机的输出轴相连接,所述锤形主体的另一端通过第一圆环槽位和固定圈与测距传感器相连接。
5、进一步地,所述本体头部包括空心壳体,所述壳体拼合连接有第一盖板和第二盖板,所述电源模块和cpg控制器安装于壳体内部,所述壳体的前端设有凸起部,所述凸起部开设有第一矩形槽,所述第一矩形槽与头部电机配合连接;
6、所述壳体的后端对称地设置有第二矩形槽和第三矩形槽,用于分别对应配合连接侧部电机,所述第二矩形槽和第三矩形槽的上方分别设置有第二圆环槽位和第三圆环槽位,用于对应连接安装测距传感器。
7、进一步地,所述壳体的后端开设有用于连接躯干部的定位孔,所述壳体的底部开设有安装孔,用于插入连接开关,所述开关用于控制电源模块的通断。
8、进一步地,所述胸鳍部由软体片状材料制作而成,并通过胶水与侧部电机的输出端相连接。
9、进一步地,所述第一旋转机构包括竖向放置的第一躯干电机,所述第一躯干电机的两侧分别活动连接有第一短u型支架和第一长u型支架,所述第一躯干电机的顶部和底部分别连接有第一主舵盘和第一副舵盘,所述第一主舵盘和第一副舵盘分别与第一长u型支架的两端相连接,所述第一短u型支架与壳体后端的定位孔相连接。
10、进一步地,所述第二旋转机构包括竖向放置的第二躯干电机,所述第二躯干电机的两侧分别活动连接有第二短u型支架和第二长u型支架,所述第二躯干电机的顶部和底部分别连接有第二主舵盘和第二副舵盘,所述第二主舵盘和第二副舵盘分别与第二长u型支架的两端相连接,所述第二短u型支架与第一长u型支架相连接。
11、进一步地,所述第三旋转机构包括竖向放置的第三躯干电机,所述第三躯干电机的两侧分别活动连接有第三短u型支架和第三长u型支架,所述第三躯干电机的顶部和底部分别连接有第三主舵盘和第三副舵盘,所述第三主舵盘和第三副舵盘分别与第三长u型支架的两端相连接,所述第三短u型支架与第二长u型支架相连接,所述第三长u型支架与尾部相连接。
12、进一步地,所述尾部由软体材料浇筑而成、且与第三长u型支架固化连接为一体。
13、进一步地,所述cpg控制器由三个stein神经振荡器构成,并结合步态算法以分别控制头部电机、侧部电机、第一躯干电机、第二躯干电机和第三躯干电机的工作状态。
14、与现有技术相比,本发明具有以下优点:
15、本发明通过设计依次连接的锤形头部、本体头部、躯干部和尾部,其中,本体头部连接有胸鳍部,并在锤形头部和本体头部内分别设置测距传感器,在本体头部内设置有电源模块和cpg控制器,在躯干部设计依次相连的第一旋转机构、第二旋转机构和第三旋转机构,将锤形头部通过头部电机与本体头部相连接,胸鳍部则通过侧部电机与本体头部相连接,利用电源模块提供电能给测距传感器、头部电机、侧部电机、cpg控制器、第一旋转机构、第二旋转机构和第三旋转机构;利用cpg控制器接收测距传感器采集的数据信号,并相应控制头部电机、侧部电机、第一旋转机构、第二旋转机构和第三旋转机构的工作状态,以模拟出双髻鲨的外形与运动模式,具有环境适应性强、效率高、生态友好的优点。
16、本发明在躯干部设计三个旋转机构,每个旋转机构均由一个长u型支架、一个短u型支架、一个主舵盘,一个副舵盘与一个竖向放置的躯干电机组成,将一个电机的长u型支架与另一个电机的短u型支架通过螺纹紧固件连接,使得三个躯干电机顺次连接组成仿生双髻鲨的躯干部分,用于驱动仿生双髻鲨的身体,能够真实模拟鱼类的摆动运动。
17、本发明采用cpg控制器,结合步态算法,以根据测距传感器采集的数据信息,相应控制头部电机、侧部电机、第一躯干电机、第二躯干电机和第三躯干电机的工作状态,即对应调节各电机的摆动角度和转速,由此使得机器人能够执行前进步态或者转向步态,并且能够在上述两种步态之间自如且平滑的切换,提高机器人的运动效果及运动效率。
技术特征:
1.一种基于cpg控制器(201)的仿生双髻鲨机器人,其特征在于,包括依次连接的锤形头部(100)、本体头部(200)、躯干部(400)和尾部(500),所述本体头部(200)连接有胸鳍部,所述锤形头部(100)和本体头部(200)内分别设置有测距传感器,所述锤形头部(100)通过头部电机(207)与本体头部(200)相连接,所述本体头部(200)内设置有电源模块(202)和cpg控制器(201),所述胸鳍部通过侧部电机与本体头部(200)相连接,所述躯干部(400)包括依次相连的第一旋转机构(416)、第二旋转机构(417)和第三旋转机构(418),所述电源模块(202)用于提供电能给测距传感器、头部电机(207)、侧部电机、cpg控制器(201)、第一旋转机构(416)、第二旋转机构(417)和第三旋转机构(418);
2.根据权利要求1所述的一种基于cpg控制器(201)的仿生双髻鲨机器人,其特征在于,所述锤形头部(100)包括片状结构的锤形主体(101),所述锤形主体(101)的一端与头部电机(207)的输出轴相连接,所述锤形主体(101)的另一端通过第一圆环槽位(104)和固定圈(102)与测距传感器相连接。
3.根据权利要求1所述的一种基于cpg控制器(201)的仿生双髻鲨机器人,其特征在于,所述本体头部(200)包括空心壳体(203),所述壳体(203)拼合连接有第一盖板(204)和第二盖板(205),所述电源模块(202)和cpg控制器(201)安装于壳体(203)内部,所述壳体(203)的前端设有凸起部,所述凸起部开设有第一矩形槽(206),所述第一矩形槽(206)与头部电机(207)配合连接;
4.根据权利要求3所述的一种基于cpg控制器(201)的仿生双髻鲨机器人,其特征在于,所述壳体(203)的后端开设有用于连接躯干部(400)的定位孔(214),所述壳体(203)的底部开设有安装孔(215),用于插入连接开关(216),所述开关(216)用于控制电源模块(202)的通断。
5.根据权利要求1所述的一种基于cpg控制器(201)的仿生双髻鲨机器人,其特征在于,所述胸鳍部由软体片状材料制作而成,并通过胶水与侧部电机的输出端相连接。
6.根据权利要求4所述的一种基于cpg控制器(201)的仿生双髻鲨机器人,其特征在于,所述第一旋转机构(416)包括竖向放置的第一躯干电机(402),所述第一躯干电机(402)的两侧分别活动连接有第一短u型支架(401)和第一长u型支架(405),所述第一躯干电机(402)的顶部和底部分别连接有第一主舵盘(403)和第一副舵盘(404),所述第一主舵盘(403)和第一副舵盘(404)分别与第一长u型支架(405)的两端相连接,所述第一短u型支架(401)与壳体(203)后端的定位孔(214)相连接。
7.根据权利要求6所述的一种基于cpg控制器(201)的仿生双髻鲨机器人,其特征在于,所述第二旋转机构(417)包括竖向放置的第二躯干电机(407),所述第二躯干电机(407)的两侧分别活动连接有第二短u型支架(406)和第二长u型支架(410),所述第二躯干电机(407)的顶部和底部分别连接有第二主舵盘(408)和第二副舵盘(409),所述第二主舵盘(408)和第二副舵盘(409)分别与第二长u型支架(410)的两端相连接,所述第二短u型支架(406)与第一长u型支架(405)相连接。
8.根据权利要求7所述的一种基于cpg控制器(201)的仿生双髻鲨机器人,其特征在于,所述第三旋转机构(418)包括竖向放置的第三躯干电机(412),所述第三躯干电机(412)的两侧分别活动连接有第三短u型支架(411)和第三长u型支架(415),所述第三躯干电机(412)的顶部和底部分别连接有第三主舵盘(413)和第三副舵盘(414),所述第三主舵盘(413)和第三副舵盘(414)分别与第三长u型支架(415)的两端相连接,所述第三短u型支架(411)与第二长u型支架(410)相连接,所述第三长u型支架(415)与尾部(500)相连接。
9.根据权利要求8所述的一种基于cpg控制器(201)的仿生双髻鲨机器人,其特征在于,所述尾部(500)由软体材料浇筑而成、且与第三长u型支架(415)固化连接为一体。
10.根据权利要求8所述的一种基于cpg控制器(201)的仿生双髻鲨机器人,其特征在于,所述cpg控制器(201)由三个stein神经振荡器构成,并结合步态算法以分别控制头部电机(207)、侧部电机、第一躯干电机(402)、第二躯干电机(407)和第三躯干电机(412)的工作状态。
技术总结
本发明涉及一种基于CPG控制器的仿生双髻鲨机器人,包括依次连接的锤形头部、本体头部、躯干部和尾部,本体头部连接有胸鳍部,锤形头部和本体头部内设置有测距传感器,锤形头部通过头部电机与本体头部相连接,本体头部内设置有电源模块和CPG控制器,胸鳍部通过侧部电机与本体头部相连接,躯干部包括依次相连的第一旋转机构、第二旋转机构和第三旋转机构,电源模块提供电能给测距传感器、头部电机、侧部电机、CPG控制器、第一至第三旋转机构;CPG控制器接收测距传感器采集的数据信号,相应控制头部电机、侧部电机、第一至第三旋转机构的工作状态。与现有技术相比,本发明模拟双髻鲨的外形与运动原理,具有环境适应性强、运行效率高及生态友好的优点。
技术研发人员:宋自根,岳新阳,周宇斐,徐鉴
受保护的技术使用者:同济大学
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!