集装箱船舶系统及其装卸货方法与流程
本发明涉及船舶运输的,尤其涉及集装箱船舶系统及其装卸货方法。
背景技术:
1、集装箱码头是实现海陆物流运输的枢纽,随着船舶大型化,港口的装卸效率迫切需要不断提高,目前,国内外无论传统集装箱码头,还是自动化集装箱码头,都无法解决船舶随海浪摇摆和吊具进船舱问题,岸桥从船上装卸集装箱时均需要人工辅助定位操作。
2、人工操作存在人工成本高、装卸效率低、安全系数低以及受环境影响较大的缺陷,且对操作人员操作经验要求高,如何实现吊具安全、自动、高效进船舱,如何摆脱人工参与,如何以经济可行的方案攻克岸桥装卸集装箱全自动化、无人化,是一直困扰大多数港口效率提升的难题。
3、申请号为:202011610547.5,名称为一种导向装置及包含该导向装置的集装箱吊具的文件,提出了一种改进型的吊具,但是在该文件中,并未对船舶以及集装箱装卸料方案进行改进,在实际工作过程中,仅能实现沿着集装箱长度方向的导向和定位,对集装箱整个的装卸货过程,并未涉及,因此,并不能实现集装箱船舶系统和装卸货的智能化的提高。
技术实现思路
1、本发明提供集装箱船舶系统及其装卸货方法,用以解决现有技术中存在的集装箱船舶装卸货过程中,用于吊装集装箱的吊具由于船体随海浪摇摆,吊具进入船舱过程中定位困难,集装箱船舶装卸货效率低问题。
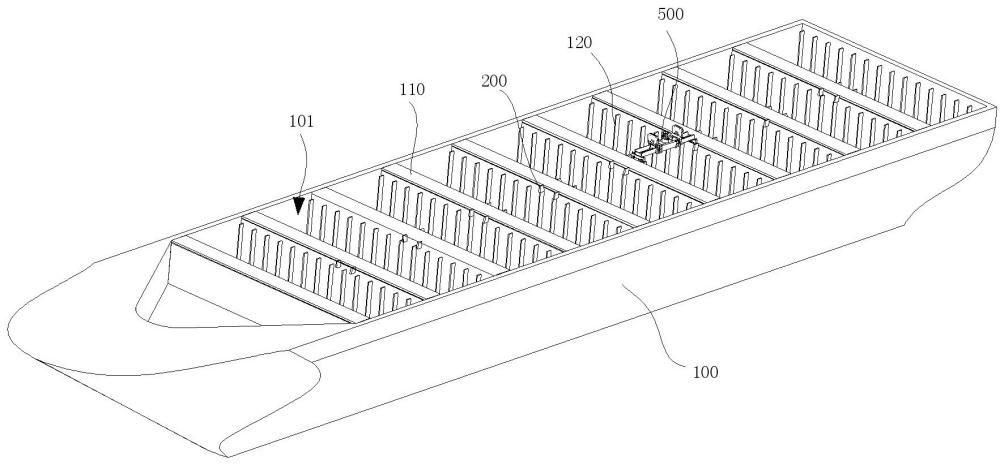
2、本发明提供集装箱船舶系统,包括:船体,其沿着第一方向分散设置有多个横向隔挡件,相邻所述横向隔挡件之间形成有运输仓,各所述运输仓的两侧沿着垂直于第一方向的第二方向分别设置有多个纵向隔挡件,相邻所述纵向隔挡件之间形成有运输位,各所述运输位内叠放有多个集装箱;
3、辅助定位装置,其安装在各所述横向隔挡件上,所述辅助定位装置包括驱动组件和定位组件,驱动组件用于带动定位组件在运输位之间移动;
4、吊具装置,活动设置在所述船体的上方,吊具装置包括吊具本体、设置在所述吊具本体两端的横梁以及位于所述横梁两端的导向件,所述吊具装置在所述导向件的作用下沿着对应定位组件的第一导向面移动至对应所述运输位。
5、优选的,所述驱动组件包括驱动电机、传动轴、传动齿轮、传动链条,所述驱动电机固定在所述横向隔挡件上,各所述横向隔挡件的两端分别转动连接有一个传动轴,所述驱动电机的输出轴与其中一个所述传动轴连接,所述传动轴上固定有传动齿轮,所述传动链条与两端的所述传动齿轮配合连接;所述传动链条包括第一链条段和第二链条段,所述第一链条段和所述第二链条段上分别连接有一组所述定位组件。
6、优选的,所述定位组件包括连接部和设置在所述连接部上的两个第一定位部,各所述第一定位部上相互靠近的一侧形成有第一导向面,两个所述第一导向面形成有沿着进仓方向渐缩的导向口,连接部与所述传动链条可拆卸连接。
7、优选的,所述传动链条包括多个链节,各所述链节的外侧连接有吸附部,所述连接部靠近所述传动链条的一侧设置有电磁部,电磁部用于与吸附部连接。
8、优选的,所述横向隔挡件上形成有沿着所述第二方向延伸的移动槽,所述移动槽内转动连接有滚动部;所述连接部的底部延伸至所述移动槽内,所述连接部的底部与所述滚动部接触连接;
9、各所述移动槽靠近所述运输仓的一侧形成有支撑立部,所述支撑立部上形成有沿着第二方向延伸的连接槽口,所述连接部和所述第一定位部之间通过中间部连接;所述中间部贯穿所述连接槽口,所述第一定位部和所述连接部分别位于所述支撑立部的两侧。
10、优选的,所述横梁的两端形成有向下延伸的凸部,所述凸部的下表面形成有起吊部;
11、所述导向件包括导向驱动部与所述导向驱动部连接的翻转杆以及连接在所述翻转杆末端的翻转板,所述翻转板上形成有定位弧面,所述吊具装置在所述定位弧面的作用下沿着所述第一导向面移动至对应所述运输位;
12、所述横梁的底部设置有储存槽,储存槽用于储存所述翻转板,所述吊具装置下移过程中,所述导向驱动部带动所述翻转板打开,所述吊具装置移动至所述运输位内之后,所述导向驱动部带动所述翻转板闭合,所述翻转板转动至所述储存槽内,所述起吊部将所述集装箱吊起。
13、优选的,扫描设备,其用于对船体进行扫描,用于获取所述船体的轮廓以及各个所述运输位的位置;
14、起重机,其与所述吊具装置连接,用于控制所述吊具装置升降;
15、控制系统,其与所述扫描设备、所述起重机、所述驱动电机以及所述导向驱动部信号连接。
16、本发明还提供了集装箱船舶装卸货方法,应用于如上所述的集装箱船舶系统,装卸货方法包括以下步骤:
17、s1、通过扫描设备对船体轮廓进行扫描,获取各个运输位的位置,并将扫描信息输送给控制系统;
18、s2、控制系统基于扫描信息确定目标集装箱装入或取出的运输位;
19、s3、所述控制系统控制所述定位组件移动至目标集装箱装入或取出的运输位;
20、s4、当需要卸货时,所述控制系统控制所述吊具装置呈打开状态,根据辅助定位装置的定位并控制所述吊具装置移动至:目标集装箱取出的运输位的目标起吊位置;
21、当需要装货时,所述控制系统控制起重机工作,使得夹取目标集装箱的吊具装置移动至:目标集装箱装入的运输位的目标集装箱下放位置;
22、s5、当需要卸货时,所述控制系统控制所述吊具装置关闭,然后对目标集装箱进行抓取动作;
23、当需要装货时,所述控制系统控制吊具装置打开。
24、与现有技术相比,本发明具有以下有益效果:吊具本体将两端的横梁进行连接支撑,四个导向件分别设置在两个横梁的两端上,四个导向件分别对应输送位上的四个定位部,导向件对吊具本体和横梁沿着对应导向面移动至对应运输位内,帮助吊具装置移动至对应运输位内,定位更加准确,吊装精度高,整个定位和吊装过程不需要人工参与调整位置,自动化程度高,对操作人员依赖程度降低,安全可靠。
技术特征:
1.集装箱船舶系统,其特征在于,包括:
2.根据权利要求1所述的集装箱船舶系统,其特征在于,所述驱动组件包括驱动电机、传动轴、传动齿轮、传动链条,所述驱动电机固定在所述横向隔挡件上,各所述横向隔挡件的两端分别转动连接有一个传动轴,所述驱动电机的输出轴与其中一个所述传动轴连接,所述传动轴上固定有传动齿轮,所述传动链条与两端的所述传动齿轮配合连接;所述传动链条包括第一链条段和第二链条段,所述第一链条段和所述第二链条段上分别连接有一组所述定位组件。
3.根据权利要求2所述的集装箱船舶系统,其特征在于,
4.根据权利要求3所述的集装箱船舶系统,其特征在于,所述传动链条包括多个链节,各所述链节的外侧连接有吸附部,所述连接部靠近所述传动链条的一侧设置有电磁部,电磁部用于与吸附部连接。
5.根据权利要求3所述的集装箱船舶系统,其特征在于,所述横向隔挡件上形成有沿着所述第二方向延伸的移动槽,所述移动槽内转动连接有滚动部;所述连接部的底部延伸至所述移动槽内,所述连接部的底部与所述滚动部接触连接;
6.根据权利要求3所述的集装箱船舶系统,其特征在于,所述横梁的两端形成有向下延伸的凸部,所述凸部的下表面形成有起吊部;
7.根据权利要求1所述的集装箱船舶系统,其特征在于,还包括:
8.根据权利要求7所述的集装箱船舶系统,其特征在于,每个运输位放置多个同一类集装箱,集装箱船舶系统还包括:
9.根据权利要求7所述的集装箱船舶系统,其特征在于,还包括,
10.集装箱船舶装卸货方法,应用于如权利要求1-9中任一项所述的集装箱船舶系统,其特征在于,装卸货方法包括以下步骤:
技术总结
本发明提供集装箱船舶系统及其装卸货方法,涉及船舶运输的技术领域,集装箱船舶系统包括船体、辅助定位装置以及吊具装置,船体设置有多个运输位,各运输位内叠放有多个集装箱;辅助定位装置安装在各横向隔挡件上,辅助定位装置包括驱动组件和定位组件;吊具装置包括吊具本体、横梁以及导向件,吊具装置在导向件的作用下沿着对应导向面移动至对应运输位内;吊具装置吊装目标集装箱的时候,其导向件在导向口的作用下可快速移动至对应运输位内,定位更加准确,吊装精度高,整个定位和吊装过程不需要人工参与调整位置,自动化程度高,对操作人员依赖程度降低,安全可靠。
技术研发人员:张连钢,王延春,石强,王心成,李传浩,孙秀良,王晓龙,王志
受保护的技术使用者:青岛港国际股份有限公司
技术研发日:
技术公布日:2024/7/9
- 还没有人留言评论。精彩留言会获得点赞!