一种基于嵌入金属层双稳态层合板的磁驱动仿生鱼尾结构
本发明涉及仿生机器鱼,具体涉及一种基于嵌入金属层双稳态层合板的磁驱动仿生鱼尾结构。
背景技术:
1、仿生领域在机器人设计方向有着举足轻重的地位,水下机器人因其在水下探测,信息收集,军事,海洋救援等领域发挥着重要的作用。且由于传统的水下机器人多采用机械式结构进行推进,这样使得水下机器人的体积增大、制备困难、成本高、能耗大等,而小型的仿生鱼机器人因为其空间有限,导致对结构设计的要求较高,这使得其应用场景受到了极大的限制。因此,迫切需要一种结构简单、低能耗、低成本的水下仿生鱼驱动结构来解决问题。
技术实现思路
1、针对仿生鱼尾推进结构现存在的问题,本发明提供了一种基于嵌入金属层双稳态层合板的磁驱仿生鱼尾推进装置,将磁场驱动与双稳态复合材料结构结合,使仿生鱼尾推进装置具有结构简单、低能耗、低成本、高推进速度的优点。
2、本发明的技术方案如下:
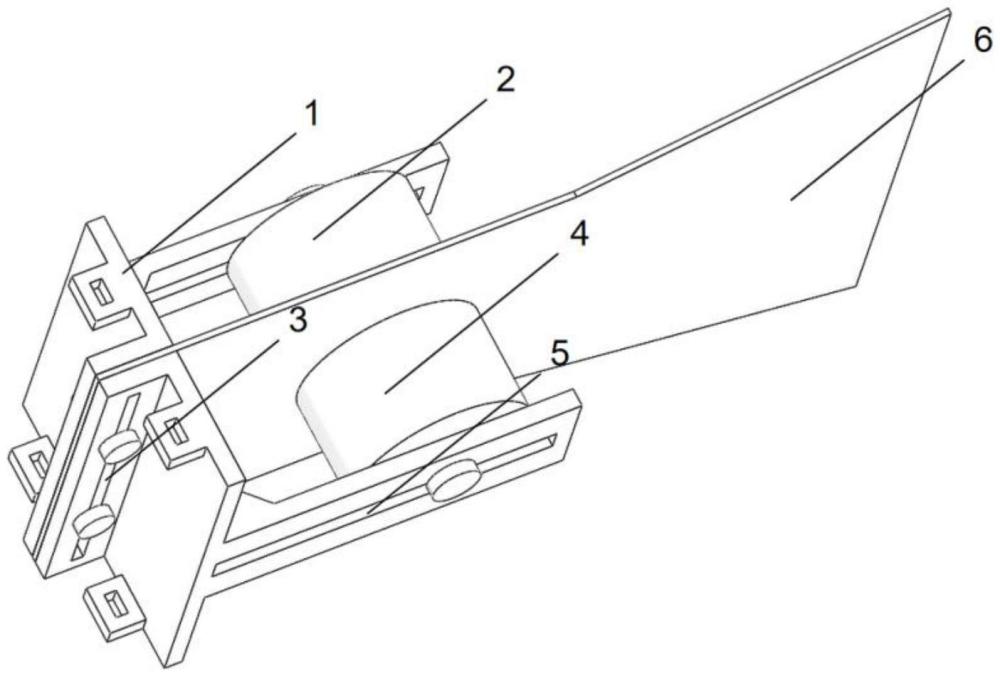
3、一种基于嵌入金属层双稳态层合板的磁驱动仿生鱼尾结构,包括仿生磁驱动鱼尾结构夹持装置、嵌入金属层双稳态层合板、电磁铁一及电磁铁二(两个电磁铁);嵌入金属层双稳态层合板的一端固定设置在仿生磁驱动鱼尾结构夹持装置上,另一端自由设置;
4、所述电磁铁一及电磁铁二相对设置在仿生磁驱动鱼尾结构夹持装置上,并位于嵌入金属层双稳态层合板两侧位置(电磁铁一与电磁铁二之间设有大于层合板厚度的间隙);通过电磁铁一及电磁铁二上电与嵌入金属层双稳态层合板的金属层发生磁力作用,促使层合板发生稳态转变,即实现从第一稳态到第二稳态的突变,或从第二稳态到第一稳态的突变;通过两侧电磁铁的交替上电与掉电实现层合板稳态的反复转变,来达到仿生鱼尾摆动的效果。
5、进一步的,仿生磁驱动鱼尾结构夹持装置与嵌入金属层双稳态层合板完全接触并通过在层合板末端打孔,采用螺栓固定。
6、所述仿生磁驱动鱼尾结构夹持装置包括两个对称设置的夹持装置半体,所述夹持装置半体包括层合板固定部及电磁铁固定部;所述层合板固定部设有竖直方向长方形通孔,通过螺栓将两个夹持装置半体和嵌入金属层双稳态层合板一端共同固定;竖直方向长方形通孔可以适应不同尺寸的层合板;所述电磁铁固定部设有水平方向长方形通孔,通过螺栓将电磁铁一或电磁铁二固定;水平方向长方形通孔可以改变电磁铁位置以达到最佳驱动效果;
7、进一步的,嵌入金属层双稳态层合板包括的制备方法如下:
8、s1:使用裁剪机将单向碳纤维预浸料裁剪得到需要的铺设形状,将裁剪好的碳纤维预浸料和金属层按照设定的铺设要求在金属平板上进行铺设,同时将剪切好的鱼尾形状的金属尾部单元与碳纤维预浸料按照顺序铺放贴合,铺设完成后由另一金属平板压制,放入热压罐进行高温固化;
9、s2:固化完成后,从热压罐中快速取出放入室温下自然冷却,获得嵌入金属层双稳态层合板,且处于第一稳态;
10、s3:通过外力改变第一稳态的形状,获得临时形状的双稳态层合板,且处于第二稳态。
11、s1中:
12、铺设层数:共五层,包括四层碳纤维预浸料及一层金属层;
13、铺设角度:第一层和第五层的纤维方向为0°;第二层与第四层纤维方向按照0°和90°依次交替设置,由三个部分组成,中间部分纤维方向为90°,两侧部分纤维方向为0°;
14、金属层为中间层铺放在第二层与第四层碳纤维预浸料之间,剪切好的鱼尾形状的尾部单元与金属层同层铺设,其一部分铺放在碳纤维预浸料内部,另一部分裸露在预浸料外部;
15、铺设顺序:安装第一层、第二层、中间层、第四层、第五层依次铺设。
16、进一步的,所述金属层的面积小于中间层中心单元的面积,通过改变金属层所占层合板中间层中心单元的比例,能够改变嵌入金属层双稳态层合板的曲率大小。即增大所述金属层所占嵌入金属层双稳态层合板中间层中心单元的比例,则嵌入金属层双稳态层合板的曲率减小,减小所述金属层所占嵌入金属层双稳态层合板中间层中心单元的比例,则嵌入金属层双稳态层合板的曲率增大。
17、进一步的,金属层形状为长方形、正方形中的一种,其厚度为0.1-1mm。
18、进一步的,所述碳纤维预浸料的形状为长方形,碳纤维预浸料的厚度为0.05-0.15mm。
19、进一步的,所述高温固化的温度为150-180℃,固化时间为1-3h。
20、进一步的,所述单向碳纤维预浸料为t700单向碳纤维环氧树脂基预浸料、t800单向碳纤维环氧树脂基预浸料、t700单向碳纤维双马来酰胺基预浸料中的一种;所述金属层为铁片、钢片中的一种;所述金属平板为由耐高温布包覆的铁板、铝板、铜板中的一种。
21、进一步的,电磁铁与嵌入金属层双稳态层合板的距离在1-5mm之间,夹持装置右侧上的电磁铁固定部具有2-6mm的长方形通孔,夹持装置左侧的层合板固定部具有1-4mm的长方形通孔。
22、本发明的有益效果如下:
23、本发明本发明采用嵌入金属层双稳态层合板充当仿生鱼结构的主要驱动构件,采用电磁铁驱动层合板发生稳态转变,不仅结构更加简化,也由于双稳态结构的快速的稳态突变以及轻量化等的特性,保证了轻质以及一定的行进速度。成功解决了传统的水下机器人多采用机械式结构进行推进,使得水下机器人的体积增大、制备困难、成本高、能耗大等,以及小型的仿生鱼机器人因为其空间有限,导致对结构设计的要求较高等的问题;因此,本发明具有更为广泛的应用。
技术特征:
1.一种基于嵌入金属层双稳态层合板的磁驱动仿生鱼尾结构,其特征在于,包括仿生磁驱动鱼尾结构夹持装置、嵌入金属层双稳态层合板、电磁铁一及电磁铁二;所述嵌入金属层双稳态层合板的一端固定设置在仿生磁驱动鱼尾结构夹持装置上,另一端自由设置;所述电磁铁一及电磁铁二相对设置在仿生磁驱动鱼尾结构夹持装置上,并位于嵌入金属层双稳态层合板两侧位置;通过电磁铁一及电磁铁二上电与嵌入金属层双稳态层合板的金属层发生磁力作用,促使层合板发生稳态转变,即实现从第一稳态到第二稳态的突变,或从第二稳态到第一稳态的突变;通过两侧电磁铁的交替上电与掉电实现层合板稳态的反复转变,来达到仿生鱼尾摆动的效果。
2.根据权利要求1所述的一种基于嵌入金属层双稳态层合板的磁驱动仿生鱼尾结构,其特征在于,所述仿生磁驱动鱼尾结构夹持装置包括两个对称设置的夹持装置半体,所述夹持装置半体包括层合板固定部及电磁铁固定部;所述层合板固定部设有竖直方向长方形通孔,通过螺栓将两个夹持装置半体和嵌入金属层双稳态层合板一端共同固定;所述电磁铁固定部设有水平方向长方形通孔,通过螺栓将电磁铁一或电磁铁二固定。
3.根据权利要求1所述的一种基于嵌入金属层双稳态层合板的磁驱动仿生鱼尾结构,其特征在于,所述嵌入金属层双稳态层合板包括的制备方法如下:
4.根据权利要求3所述的一种基于嵌入金属层双稳态层合板的磁驱动仿生鱼尾结构,其特征在于,所述s1中:
5.根据权利要求3所述的一种基于嵌入金属层双稳态层合板的磁驱动仿生鱼尾结构,其特征在于,所述金属层的面积小于中间层中心单元的面积,通过改变金属层所占层合板中间层中心单元的比例,能够改变嵌入金属层双稳态层合板的曲率大小。
6.根据权利要求3所述的一种基于嵌入金属层双稳态层合板的磁驱动仿生鱼尾结构,其特征在于,金属层形状为长方形、正方形中的一种,其厚度为0.1-1mm。
7.根据权利要求3所述的一种基于嵌入金属层双稳态层合板的磁驱动仿生鱼尾结构,其特征在于,所述碳纤维预浸料的形状为长方形,碳纤维预浸料的厚度为0.05-0.15mm。
8.根据权利要求3所述的一种基于嵌入金属层双稳态层合板的磁驱动仿生鱼尾结构,其特征在于,所述高温固化的温度为150-180℃,固化时间为1-3h。
9.根据权利要求3所述的一种基于嵌入金属层双稳态层合板的磁驱动仿生鱼尾结构,其特征在于,所述单向碳纤维预浸料为t700单向碳纤维环氧树脂基预浸料、t800单向碳纤维环氧树脂基预浸料、t700单向碳纤维双马来酰胺基预浸料中的一种;所述金属层为铁片、钢片中的一种;所述金属平板为由耐高温布包覆的铁板、铝板、铜板中的一种。
10.根据权利要求5所述的一种基于嵌入金属层双稳态层合板的磁驱动仿生鱼尾结构,其特征在于,增大所述金属层所占嵌入金属层双稳态层合板中间层中心单元的比例,则嵌入金属层双稳态层合板的曲率减小,减小所述金属层所占嵌入金属层双稳态层合板中间层中心单元的比例,则嵌入金属层双稳态层合板的曲率增大。
技术总结
本发明涉及仿生机器鱼技术领域,具体公开了一种基于嵌入金属层双稳态层合板的磁驱动仿生鱼尾结构,包括仿生磁驱动鱼尾结构夹持装置、嵌入金属层双稳态层合板、电磁铁一及电磁铁二;所述嵌入金属层双稳态层合板的一端固定设置在仿生磁驱动鱼尾结构夹持装置上,另一端自由设置;所述电磁铁一及电磁铁二相对设置在仿生磁驱动鱼尾结构夹持装置上,并位于嵌入金属层双稳态层合板两侧位置;本发明本发明采用嵌入金属层双稳态层合板充当仿生鱼结构的主要驱动构件,采用电磁铁驱动层合板发生稳态转变,不仅结构更加简化,也由于双稳态结构的快速的稳态突变以及轻量化等的特性,保证了轻质以及一定的行进速度。
技术研发人员:张征,李承义,潘柏松,孙敏,张广,李吉泉
受保护的技术使用者:浙江工业大学
技术研发日:
技术公布日:2024/9/19
- 还没有人留言评论。精彩留言会获得点赞!