基于苏格兰轭的尾鳍快速摆动推进仿生水下机器人系统
本发明涉及仿生水下推进及水下机器人,尤其是涉及基于苏格兰轭的尾鳍快速摆动推进仿生水下机器人系统。
背景技术:
1、仿生水下机器人,例如尾鳍推进仿生水下机器人等,相较于传统螺旋桨推进机器人游动更敏捷且灵活性更高,由于其具备体积较小、运动时产生的噪音较小、游动灵活等特点能够在复杂或者狭窄水下环境替代人类实现作业,广泛应用于水下勘探、救援、侦查等领域。同时,仿生水下机器人可以模拟不同鱼类的游动方式,这使得它们可以适应各种不同的水域环境,从浅水区到深海区都能够高效工作。
2、目前受限于水下使用电机的驱动性能和传动结构,一般的尾鳍推进结构多采用多舵机串联来实现,这种推动结构需要的舵机数量多,结构复杂、故障率高;由于舵机本身响应速度慢,导致机器鱼尾鳍摆动速度一般较慢,游动速度远不及自然鱼类,不能实现类似鱼类的高加速度响应,水下加速运动时间长,无法在短时间内达到理想的游动速度,且这类仿生机器鱼的机动性也较差。总之,现有尾鳍推进的仿生水下机器人很难达到或接近自然鱼类尾鳍摆动的瞬时爆发力和游动加速度。
技术实现思路
1、本发明的目的在于提供基于苏格兰轭的尾鳍快速摆动推进仿生水下机器人系统,以解决现有技术中尾鳍推进结构摆动速度慢、响应时间长的问题,本发明的快速尾鳍推进仿生水下机器人模拟鱼类尾部的摆动,传动效率高,响应速度快,能够实现尾鳍的高频摆动,提高游动速度。
2、本发明提供的基于苏格兰轭的尾鳍快速摆动推进仿生水下机器人系统,包括主机壳体、尾鳍驱动电机、苏格兰轭机构和尾鳍结构,所述苏格兰轭机构包括偏心轴、摇杆架和连接轴,所述尾鳍驱动电机设置于所述主机壳体内,所述尾鳍驱动电机的输出轴与所述偏心轴连接,所述摇杆架的头端具有竖向上的滑动槽,所述偏心轴滑动设置于所述滑动槽中,所述摇杆架的中段具有竖向的连接孔并通过所述连接孔与所述连接轴可转动连接,所述连接轴连接于所述主机壳体的尾端,所述摇杆架的尾端伸出所述主机壳体并与所述尾鳍结构连接,所述尾鳍驱动电机转动带动所述偏心轴绕所述尾鳍驱动电机的输出轴转动并带动所述摇杆架的头端左右运动,从而带动所述尾鳍结构左右摆动。
3、作为本发明的一个优选方案,所述摇杆架包括第一摇杆和第二摇杆,所述第一摇杆与第二摇杆的头端通过连接架相平行连接,所述滑动槽设置于所述连接架上,所述连接孔设置于所述第一摇杆和第二摇杆上,所述连接轴竖直穿过所述所述第一摇杆和第二摇杆设置。
4、作为本发明的一个优选方案,所述偏心轴安装于连接板上,所述连接板与所述尾鳍驱动电机的输出轴连接,所述偏心轴的轴线与所述尾鳍驱动电机输出轴的轴线之间呈夹角设置,所述连接架上对应所述滑动槽的上下两侧分别设置有边槽。
5、作为本发明的一个优选方案,所述主机壳体包括控制舱和尾舱,所述控制舱与所述尾舱可拆卸连接,所述控制舱密封设置,所述尾舱平滑连接于所述控制舱的尾端,所述尾鳍驱动电机设置于所述尾舱中,所述尾鳍结构连接于所述尾舱的尾部。
6、作为本发明的一个优选方案,所述尾鳍结构包括尾鳍刚性段和尾鳍柔性段,所述尾鳍刚性段包括连接部、第一支撑部和第二支撑部,所述连接部与所述所述摇杆架的尾端连接,所述第一支撑部与所述第二支撑部分别连接于所述连接部上并向所述连接部的上下两侧平滑延伸设置,所述第一支撑部与所述第二支撑部关于所述连接部的中线对称设置,所述尾鳍柔性段连接于所述第一支撑部和所述第二支撑部上并向尾端平滑延伸设置。
7、作为本发明的一个优选方案,所述主机壳体的中段的纵截面呈圆型形,所述主机壳体的前段和后段的纵截面均呈梭形,所述主机壳体横向剖面呈头尾尖且由头尾两端向中间逐渐变宽的流线型结构。
8、作为本发明的一个优选方案,还包括左胸鳍俯仰机构和右胸鳍俯仰机构,所述左胸鳍俯仰机构和右胸鳍俯仰机构分别设置于所述控制舱的左右两侧并关于头尾轴对称设置;所述左胸鳍俯仰机构和右胸鳍俯仰机构均包括胸鳍舵机和胸鳍板,所述控制舱的下侧安装腔,所述安装腔与所述控制舱相隔离设置,左右两个所述胸鳍舵机分别通过安装板安装于所述安装腔中,所述胸鳍板与所述胸鳍舵机的动力输出端连接并分别向左右延伸延伸设置。
9、作为本发明的一个优选方案,还包括单腹鳍偏航机构,所述单腹鳍偏航机构包括腹鳍舵机和腹鳍板,所述腹鳍舵机安装于所述尾舱的下侧且其动力输出端向下设置,所述腹鳍板与所述腹鳍舵机的动力输出端连接并向下延伸设置。
10、作为本发明的一个优选方案,所述胸鳍板和所述腹鳍板均具有弧形边和直角边,所述弧形边朝向所述主机壳体的头端设置,所述直角边朝向所述主机壳体的尾端设置,所述胸鳍板和所述腹鳍板的宽度由靠近舵机的一侧向远离舵机的一侧逐渐减小。
11、作为本发明的一个优选方案,还包括控制单元、无线通讯单元、供电单元和传感器,所述控制单元与所述无线通讯单元、所述供电单元和所述传感器电连接,所述传感器用于实时感知流场信息并传输给所述控制单元,所述无线通讯单元用于接收外部指令,所述供电单元用于为机器人运行提供动力,所述控制单元用于根据接收的指令或预设的指令控制机器人的尾鳍驱动电机、左胸鳍俯仰机构、右胸鳍俯仰机构和单腹鳍偏航机构的运动。
12、与现有技术相比,本发明有以下积极效果:
13、本发明提供的基于苏格兰轭的尾鳍快速摆动推进仿生水下机器人系统,包括主机壳体、尾鳍驱动电机、苏格兰轭机构和尾鳍结构,苏格兰轭机构包括偏心轴、摇杆架和连接轴,尾鳍驱动电机设置于主机壳体内,尾鳍驱动电机的输出轴与偏心轴连接,摇杆架的头端具有竖向上的滑动槽,偏心轴滑动设置于滑动槽中,摇杆架的中段具有竖向的连接孔并通过连接孔与连接轴可转动连接,连接轴连接于主机壳体的尾端,摇杆架的尾端伸出主机壳体并与尾鳍结构连接,尾鳍驱动电机转动带动偏心轴绕尾鳍驱动电机的输出轴转动并带动摇杆架的头端左右运动,从而带动尾鳍结构左右摆动。本发明中的尾鳍驱动电机与苏格兰轭机构相连,通过苏格兰轭机构的转动机制,将尾鳍驱动电机的旋转运动高效转换为尾鳍结构的摆动,从而模拟鱼类尾部的摆动,传动效率高,响应速度快,能够实现尾鳍结构的高频摆动,提高游动速度,并且摆动满足标准正弦函数,可以实现更为平滑的运动,减少水下运动产生的噪音和震动,隐蔽性强。
技术特征:
1.基于苏格兰轭的尾鳍快速摆动推进仿生水下机器人系统,其特征在于,包括主机壳体(1)、尾鳍驱动电机(5)、苏格兰轭机构(7)和尾鳍结构,所述苏格兰轭机构(7)包括偏心轴(701)、摇杆架(702)和连接轴(703),所述尾鳍驱动电机(5)设置于所述主机壳体(1)内,所述尾鳍驱动电机的输出轴与所述偏心轴(701)连接,所述摇杆架(702)的头端具有竖向上的滑动槽(712),所述偏心轴(701)滑动设置于所述滑动槽(712)中,所述摇杆架(702)的中段具有竖向的连接孔(722)并通过所述连接孔(722)与所述连接轴(703)可转动连接,所述连接轴(703)连接于所述主机壳体(1)的尾端,所述摇杆架(702)的尾端伸出所述主机壳体(1)并与所述尾鳍结构(6)连接,所述尾鳍驱动电机(5)转动带动所述偏心轴(701)绕所述尾鳍驱动电机(5)的输出轴转动并带动所述摇杆架(702)的头端左右运动,从而带动所述尾鳍结构(6)左右摆动。
2.根据权利要求1所述的基于苏格兰轭的尾鳍快速摆动推进仿生水下机器人系统,其特征在于,所述摇杆架(702)包括第一摇杆(752)和第二摇杆(762),所述第一摇杆(752)与第二摇杆(762)的头端通过连接架(732)相平行连接,所述滑动槽(712)设置于所述连接架(732)上,所述连接孔(722)设置于所述第一摇杆(752)和第二摇杆(762)上,所述连接轴(703)竖直穿过所述所述第一摇杆(752)和第二摇杆(762)设置。
3.根据权利要求2所述的基于苏格兰轭的尾鳍快速摆动推进仿生水下机器人系统,其特征在于,所述偏心轴(701)安装于连接板(705)上,所述连接板(705)与所述尾鳍驱动电机(5)的输出轴连接,所述偏心轴(701)的轴线与所述尾鳍驱动电机(5)输出轴的轴线之间呈夹角设置,所述连接架(732)上对应所述滑动槽(712)的上下两侧分别设置有边槽(742)。
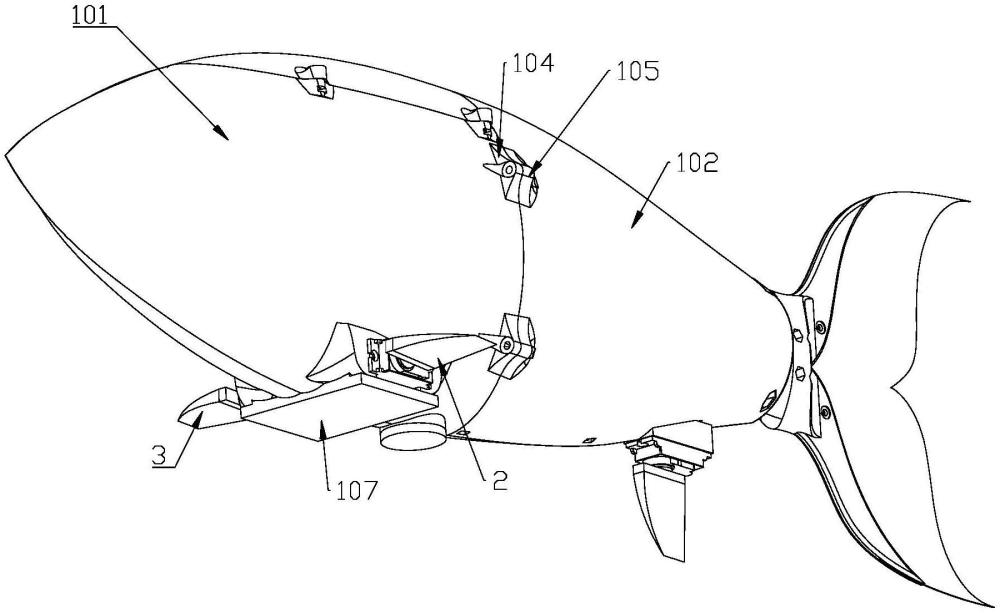
4.根据权利要求1所述的基于苏格兰轭的尾鳍快速摆动推进仿生水下机器人系统,其特征在于,所述主机壳体(1)包括控制舱(101)和尾舱(102),所述控制舱(101)与所述尾舱(102)可拆卸连接,所述控制舱(101)密封设置,所述尾舱平滑连接于所述控制舱的尾端,所述尾鳍驱动电机(5)设置于所述尾舱(102)中,所述尾鳍结构(6)连接于所述尾舱(102)的尾部。
5.根据权利要求1所述的基于苏格兰轭的尾鳍快速摆动推进仿生水下机器人系统,其特征在于,所述尾鳍结构(6)包括尾鳍刚性段(601)和尾鳍柔性段(602),所述尾鳍刚性段(601)包括连接部(611)、第一支撑部(622)和第二支撑部(632),所述连接部(611)与所述所述摇杆架(702)的尾端连接,所述第一支撑部(622)与所述第二支撑部(632)分别连接于所述连接部(611)上并向所述连接部(611)的上下两侧平滑延伸设置,所述第一支撑部(622)与所述第二支撑部(632)关于所述连接部(611)的中线对称设置,所述尾鳍柔性段(602)连接于所述第一支撑部(622)和所述第二支撑部(632)上并向尾端平滑延伸设置。
6.根据权利要求1所述的基于苏格兰轭的尾鳍快速摆动推进仿生水下机器人系统,其特征在于,所述主机壳体(1)的中段的纵截面呈圆型形,所述主机壳体(1)的前段和后段的纵截面均呈梭形,所述主机壳体(1)横向剖面呈头尾尖且由头尾两端向中间逐渐变宽的流线型结构。
7.根据权利要求4所述的基于苏格兰轭的尾鳍快速摆动推进仿生水下机器人系统,其特征在于,还包括左胸鳍俯仰机构(2)和右胸鳍俯仰机构(3),所述左胸鳍俯仰机构(2)和右胸鳍俯仰机构(3)分别设置于所述控制舱(101)的左右两侧并关于头尾轴对称设置;所述左胸鳍俯仰机构(2)和右胸鳍俯仰机构(3)均包括胸鳍舵机(201)和胸鳍板(202),所述控制舱(101)的下侧安装腔(106),所述安装腔(106)与所述控制舱(101)相隔离设置,左右两个所述胸鳍舵机(201)分别通过安装板(107)安装于所述安装腔(106)中,所述胸鳍板(202)与所述胸鳍舵机(201)的动力输出端连接并分别向左右延伸延伸设置。
8.根据权利要求7所述的基于苏格兰轭的尾鳍快速摆动推进仿生水下机器人系统,其特征在于,还包括单腹鳍偏航机构(4),所述单腹鳍偏航机构(4)包括腹鳍舵机(401)和腹鳍板(402),所述腹鳍舵机(401)安装于所述尾舱(102)的下侧且其动力输出端向下设置,所述腹鳍板(402)与所述腹鳍舵机(401)的动力输出端连接并向下延伸设置。
9.根据权利要求8所述的基于苏格兰轭的尾鳍快速摆动推进仿生水下机器人系统,其特征在于,所述胸鳍板(202)和所述腹鳍板(402)均具有弧形边(412)和直角边(413),所述弧形边(412)朝向所述主机壳体(1)的头端设置,所述直角边(413)朝向所述主机壳体(1)的尾端设置,所述胸鳍板(202)和所述腹鳍板(402)的宽度由靠近舵机的一侧向远离舵机的一侧逐渐减小。
10.根据权利要求1所述的基于苏格兰轭的尾鳍快速摆动推进仿生水下机器人系统,其特征在于,还包括控制单元(8)、无线通讯单元(9)、供电单元(10)和传感器(110),所述控制单元(8)与所述无线通讯单元(9)、所述供电单元(10)和所述传感器(110)电连接,所述传感器用于实时感知流场信息并传输给所述控制单元,所述无线通讯单元用于接收外部指令,所述供电单元用于为机器人运行提供动力,所述控制单元用于根据接收的指令或预设的指令控制机器人的尾鳍驱动电机(5)、左胸鳍俯仰机构(2)、右胸鳍俯仰机构(3)和单腹鳍偏航机构(4)的运动。
技术总结
本发明提供了一种基于苏格兰轭的尾鳍快速摆动推进仿生水下机器人系统,涉及仿生推进及水下机器人技术领域,以解决现有技术中尾鳍推进结构摆动速度慢的问题,该仿生水下机器人系统包括主机壳体、尾鳍驱动电机、苏格兰轭机构和尾鳍结构,苏格兰轭机构包括偏心轴、摇杆架和连接轴,尾鳍驱动电机设置于主机壳体内,尾鳍驱动电机的输出轴与偏心轴连接,摇杆架的头端具有竖向上的滑动槽,偏心轴滑动设置于滑动槽中,摇杆架的中段具有竖向的连接孔并通过连接孔与连接轴可转动连接,连接轴连接于主机壳体的尾端,摇杆架的尾端伸出主机壳体并与尾鳍结构连接。该机器人模拟鱼类尾部的摆动,传动效率高,响应速度快,实现尾鳍的高频摆动,提高游动速度。
技术研发人员:张益鑫,王梓铭,陈林,赵蕾开,马一轩,王兴坚,王少萍,李垄,云裕舒,白宏旭,孙孟旭,郑岳琳,徐家其
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/9/29
- 还没有人留言评论。精彩留言会获得点赞!