一种具有超长续航逐日功能的水面垃圾清洁巡检无人船机构
本发明涉及水面垃圾收集无人船巡检设备,具体涉及一种具有超长续航逐日功能的水面垃圾清洁巡检无人船机构。
背景技术:
1、目前,水面垃圾清洁和水质监测任务的解决方案多为人工操作,使用人力对水体进行清理和监测。这种方法不仅耗费大量的人力资源,还难以实现全覆盖、及时性、高效率、低成本的作业要求,且在人工作业过程中无法保证清洁和监测的标准化操作。这些因素严重影响了水体环境的质量和生态系统的平衡。
2、市面上为了解决这些问题,提出了多种方案,如人工划船打捞、机械化清洁设备和固定式水质监测站等。然而,这些方案大多数都存在着覆盖范围有限、操作复杂、维护成本高等问题。特别是在广阔水域和难以到达的区域,这些传统方法的效果和效率都无法满足实际需求。
3、近年来,随着无人技术的发展,一些无人船开始应用于水面垃圾清洁和水质监测任务。例如,已有的无人船通常配备摄像头和简单的传感器,能够部分实现水面垃圾的自动打捞和水质数据的采集。然而,这些无人船在实际应用中仍存在诸多问题。例如,多数无人船的续航能力有限,难以长时间连续作业;自动避障和路径规划技术不够成熟,导致清洁和监测效率低下;同时,现有无人船在遇到复杂水域环境时,无法灵活调整航线,容易发生碰撞或遗漏清洁区域。
4、此外,市场上的许多无人船在垃圾收集和水质监测功能的集成上也存在不足。现有的解决方案通常只能单独执行其中一项功能,难以同时高效完成垃圾清洁和水质监测任务,这大大限制了无人船在水体环境治理中的应用。
5、基于上述现状,水面垃圾清洁和水质监测任务亟需一种新型的、高效的无人船解决方案。为了提高水面垃圾清洁的覆盖率和水质监测的准确性,设计开发一种具有超长续航逐日功能的水面垃圾清洁巡检无人船机构应运而生。该无人船机构不仅能够实现长时间连续作业,还具备自主规划航线和自动避障功能,能够在复杂水域环境中高效完成清洁和监测任务。此外,通过集成先进的垃圾收集系统和多参数水质传感器,该无人船可以同时进行水面垃圾清理和水质实时监测,提供全面的水体环境治理解决方案,显著提升水域生态环境的质量
技术实现思路
1、针对现有技术的不足,本发明提供一种具有超长续航逐日功能的水面垃圾清洁巡检无人船机构,利用双船体结构和逐日太阳能板,实现对水面垃圾的高效清洁和实时监测。该无人船不仅能够长时间连续作业,显著提升清洁效率,降低运维成本,同时保障水体环境的清洁和生态平衡。
2、本发明是通过如下技术方案实现的:
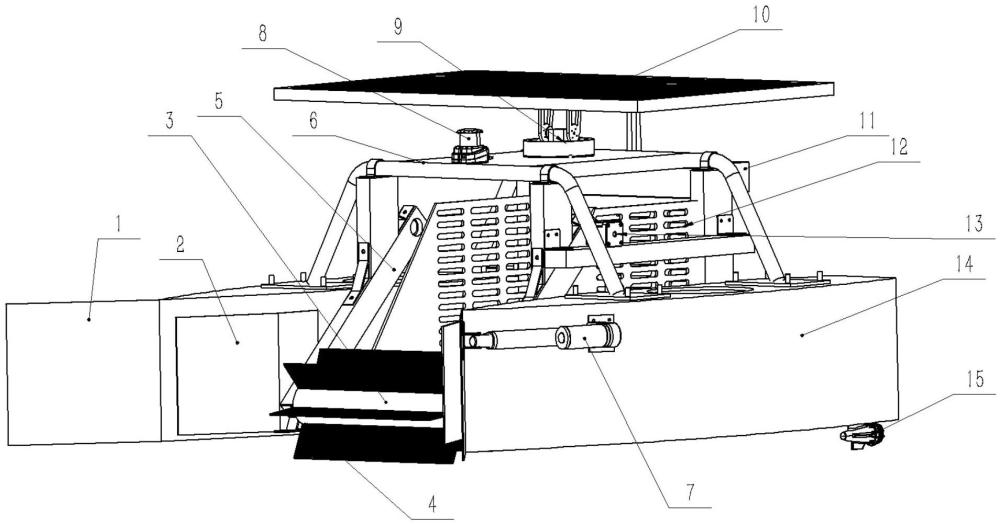
3、提供一种具有超长续航逐日功能的水面垃圾清洁巡检无人船机构,包括双船体结构、逐日太阳能板、垃圾收集机构、激光雷达传感器。所述双船体结构提供了稳定的浮力和卓越的平衡性,顶部安装的逐日太阳能板通过逐日系统自动调整角度,以最大化太阳能的吸收,确保无人船在长时间工作时具备持续的能源供应。所述垃圾收集机构位于船前端,包含旋转滚轮和垃圾筐,旋转滚轮用于将水面垃圾卷入垃圾筐内。所述激光雷达传感器位于船前端顶部,用于实时检测前方障碍物和环境特征。
4、逐日太阳能板通过一个连接组件与船顶连接。所述连接组件包括一个底座,底座下端与船体固定相连,连接部件底座上端安装有电机,该电机控制摇臂的前后移动。摇臂顶端安装第二个电机通过电机旋转实现360度旋转运动,电机顶端连接板与太阳能板通过螺栓连接所固定,从而实现逐日太阳能追踪功能。所述摇臂顶端电机连接太阳能板和连接组件的板子,使太阳能板能够随时调整角度,以最佳角度吸收太阳能。
5、进一步的,所述垃圾收集机构中的旋转滚筒通过电机驱动,在船前进时通过电机带动滚筒的转动从而将垃圾卷入垃圾筐内,提高垃圾收集效率和无人船的工作效能。
6、进一步的,无人船的控制系统包括导航模块、自动避障模块和路径规划模块,能够自主规划清洁路径,实时调整航线以避开障碍物,并对清洁范围内的作业进行监测和记录。
7、进一步的,所述自动避障模块利用激光雷达传感器实时检测前方障碍物,并通过控制系统自动调整航线避免碰撞,以确保无人船能够高效完成垃圾清洁任务。
8、本发明通过集成双船体结构、逐日太阳能板、旋转滚轮垃圾收集机构和激光雷达传感器,实现了长时间、高效、自动化的水面垃圾清洁和监测。该无人船不仅能够大幅提升水面清洁效率,降低人工成本,还可以实时监测环境状况,为水体环境的治理和保护提供科学依据。通过自主规划航线和自动避障技术,确保了无人船在复杂水域环境中的安全性和高效性,使其在实际应用中具备显著优势。
9、本发明的有益效果:
10、一、本发明利用双船体结构和逐日太阳能板,克服了传统水面垃圾清洁设备在能源供应和作业效率上的难题。随着环保需求的不断增加和水域面积的扩展,传统的人工清洁方式和常规能源驱动的清洁船效率低下、成本高昂。本发明中的逐日太阳能板通过自动调整角度,最大化吸收太阳能,提供持续的动力供应,使无人船能够长时间、高效地进行垃圾清洁作业。双船体设计则保证了无人船在复杂水域环境中的稳定性和灵活性。
11、二、本发明的自动化垃圾清洁,使得水域环境管理从人力密集型向技术密集型转变。在水面垃圾的清理和水域巡检上,大大减少了人为干预,提高了清洁效率和安全性。自动化系统能够实时监测和记录清洁作业情况,提供比传统方法更加全面和详细的数据分析,从而为水域环境管理的决策提供科学依据。同时,通过智能避障技术,无人船可以在复杂和多变的水域环境中安全作业,有效避免碰撞和其他意外情况的发生。
12、三、本发明通过旋转滚轮垃圾收集机构,提高了垃圾收集的效率和容量。旋转滚轮能够根据水面垃圾的密集程度自动调整转速,将垃圾高效卷入收集筐内,并通过压缩装置对垃圾进行压缩处理,增加了收集容量,减少了清理频次。这一设计不仅降低了人工清理成本,还提升了水面垃圾清洁的整体效率,使其在广泛应用中具有显著的优势。
13、四、本发明具有广泛的应用前景,适用于各种类型的水域环境,包括湖泊、河流、水库和城市内河等。其高效、自动化的垃圾清洁能力和可持续的能源供应,使其在环保产业中具备强大的市场竞争力和应用价值。通过长时间的自主作业,无人船能够显著提升水域环境的清洁度和生态健康,为水资源的可持续利用和环境保护提供坚实的技术支持。
技术特征:
1.一种具有超长续航逐日功能的水面垃圾清洁巡检无人船机构,其特征在于:无人船由双船体结构构成,搭载逐日太阳能板装置、垃圾收集机构和自动避障巡航控制系统;所述双船体结构提供了稳定的浮力和卓越的平衡性,顶部安装的逐日太阳能板通过逐日系统自动调整角度,以最大化太阳能的吸收,确保无人船在长时间工作时具备持续的能源供应;所述垃圾收集机构位于船前端,包含旋转垃圾滚筒和垃圾筐,旋转滚筒用于将水面垃圾卷入垃圾筐内,无人船自主规划垃圾巡航路径,减少人员操控,前方激光雷达避障传感器可实现对用于实时检测前方障碍物和环境特征以达到避障效果。保障其工作的可靠性。
2.根据权利要求1所述的具有超长续航逐日功能的水面垃圾清洁巡检无人船机构,其特征在于,所述逐日太阳能板通过伺服电机驱动,能够实现自动跟踪太阳的运动轨迹,以确保最佳角度进行太阳能吸收,进一步提升无人船的续航能力。
3.根据权利要求2所述太阳能板与无人船连接装置其特征在于:由底部圆台通过螺栓将其与船顶部相连,圆台上电机与摇臂相连可实现180°前后转动摇臂上端电机将摇臂与太阳能板上端相连实现水平360°旋转,通过两电机配合运动实现太阳能板逐日功能。
4.根据权利要求1所述的具有超长续航逐日功能的水面垃圾清洁巡检无人船机构其特征在于,所述垃圾收集机构中的旋转滚筒通过电机驱动,能够根据水面垃圾的密集程度自动调整转速,提高垃圾收集效率和无人船的工作效能。
5.根据权利要求1所述的具有超长续航逐日功能的水面垃圾清洁巡检无人船机构,其特征在于,所述激光雷达传感器能够辅助路径规划模块和自动避障模块进行更精确的导航和障碍物规避。
技术总结
本发明涉及一种具有超长续航逐日功能的水面垃圾清洁巡检无人船机构,包括具有由双船厢组成的船体、连接组件、逐日太阳能板与垃圾收集滚筒。无人船作为实现其功能的载体。无人船其上部具有连接太阳能板连接组件,连接组件包含安装在船顶部的底部支座、两个电机、摇臂与固定板。两个电机分别连接底部支座与固定板,底部电机可控制摇臂进行前后180°运动,顶部电机可实现固定板360°旋转运动,通过两电机配合工作可实现对太阳能板逐日功能及太阳源追踪功能,进而提高太阳能板发电效率提高续航里程。无人船前端设有垃圾网板滚筒,在船向前移动时滚筒由电机带动旋转实现垃圾收集。本发明利用长续航水面垃圾无人船代替人工水面垃圾作业,实现对水面垃圾快速长时间收集及巡检,显著提高效率,降低运维成本,同时保障水面清洁度。
技术研发人员:高千龙,赵新军,王彦,杨阳
受保护的技术使用者:内蒙古工业大学
技术研发日:
技术公布日:2024/9/9
- 还没有人留言评论。精彩留言会获得点赞!