一种水体生态环境用修复的水下清污机器人及使用方法与流程
本发明涉及水下废弃物清理机器人,具体为一种水体生态环境用修复的水下清污机器人及使用方法。
背景技术:
1、水下机器人是可潜入水中代替或辅助人类进行水下极限作业的机器人,通过水下目标探测和识别、水下导航定位、水下通信等高新科学技术进行作业。水下清理机器人通常在水下作业,对水下产生的垃圾进行清理。
2、现有水下废弃物清理机器人通常安装有推进装置带动水下机器人在水下便捷移动,但是这种驱动装置导致水下机器人在清理水底废弃物时,不能在水下地面进行行走,导致难以对水底地面的废弃物进行便捷清理,降低了装置的实用性,因此亟需设计一种水体生态环境用修复的水下清污机器人来解决上述问题。
技术实现思路
1、本发明的目的在于提供一种水体生态环境用修复的水下清污机器人及使用方法,以解决上述背景技术中提出的现有水下废弃物清理机器人常安装有推进装置带动水下机器人在水下便捷移动,但是这种驱动装置导致水下机器人在清理水底废弃物时,不能在水下地面进行行走,导致难以对水底地面的废弃物进行便捷清理,降低了装置实用性的问题。
2、为实现上述目的,本发明提供如下技术方案:
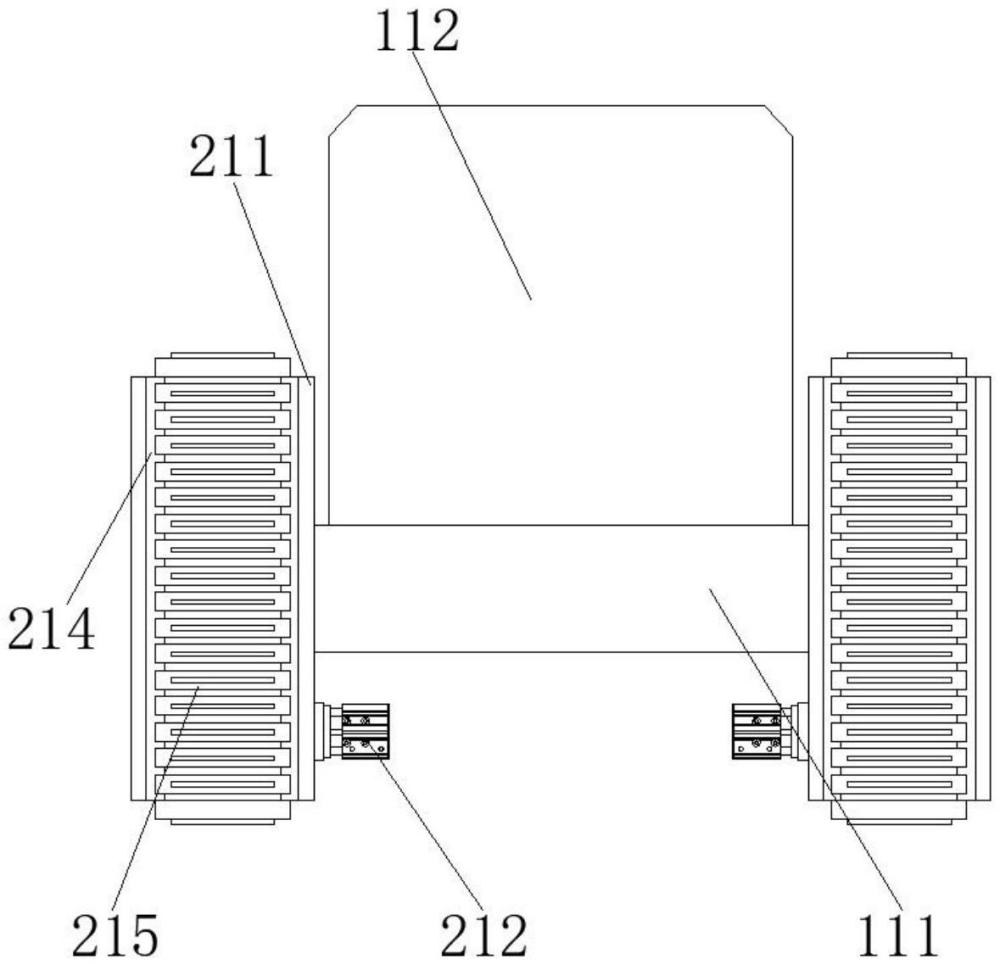
3、一种水体生态环境用修复的水下清污机器人,包括主体支架和机器人主体,所述主体支架上端固定设置有机器人主体,所述主体支架两侧设置有前进结构,所述主体支架外部设置有缓冲结构,所述前进结构包括固定板,所述固定板设置在主体支架两端,所述固定板设置有两组,所述固定板一组与主体支架两端固定,所述固定板侧壁固定设置有伺服电机,所述伺服电机输出轴固定连接有转动辊,所述转动辊表面通过齿条连接有履带,所述履带设置在两组固定板上。
4、优选的,所述履带上设置有抓地板。
5、优选的,所述固定板两组之间设置有支架辊,所述支架辊两端通过转轴与固定板活动连接,所述支架辊分别设置在由履带组成的梯形拐角处。
6、优选的,所述固定板两组之间设置有支撑辊,所述支撑辊两端通过转轴活动连接在固定板内部。
7、优选的,所述固定板内部安装有连接杆,所述连接杆内部安装有安装螺栓,且安装螺栓安装在固定板内部。
8、优选的,所述缓冲结构包括转动杆,所述转动杆固定设置在支撑辊两端,所述转动杆转动设置在凹槽内部,所述凹槽开设在固定板内部,所述转动杆表面转动套设有连接套杆,所述连接套杆远离转动杆的一端插设在固定柱内部,所述固定柱固定设置在凹槽内壁,所述连接套杆内部插设有固定杆,所述固定杆表面缠绕有弹簧。
9、优选的,所述弹簧一端连接有阻尼器,所述阻尼器安装在固定柱内部。
10、优选的,所述连接套杆侧壁固定连接有滑块,所述滑块滑动设置在滑槽内部,所述滑槽开设在固定柱内部。
11、本发明提供另一种技术方案:一种水体生态环境用修复的水下清污机器人的使用方法,包括以下步骤:
12、s1:启动伺服电机,带动转动辊进行转动,利用转动辊表面设置的链条与履带内表面啮合,即可带动履带进行转动;
13、s2:利用支架辊转动设置在固定板内部,其三组分别设置在由履带组成的梯形拐角处,可保持履带在转动前行过程中稳定运行;
14、s3:在行进过程中碰到障碍物需要缓冲时,履带对支撑辊施加力的作用,此时支撑辊带动转动杆在凹槽内部运动,进而带动连接套杆同步移动;
15、s4:连接套杆挤压弹簧,此时固定杆发生弹性形变进行缓冲作用,使驱动装置在前进过程中缓冲效果好,弹簧将力的作用传递至阻尼器进行分解,避免弹簧反复振动。
16、与现有技术相比,本发明的有益效果是:
17、1、本发明设置有前进结构,使用时,可启动伺服电机,带动转动辊进行转动,利用转动辊表面设置的链条与履带内表面啮合,即可带动履带进行转动,利用支架辊转动设置在固定板内部,其三组分别设置在由履带组成的梯形拐角处,可保持履带在转动前行过程中稳定运行,方便水下废弃物清理机器人在水下地面活动;履带上设置有抓地板,增大履带表面与地面之间的抓地力,使其行进时更加稳定,通过该设计,可将清理机器人在水底地面上进行移动清理,使该清理机器人使用范围更广,清理效果更好,提高了装置的实用性和全面性。
18、2、本发明设置有缓冲结构,在行进过程中,碰到障碍物需要缓冲时,履带对支撑辊施加力的作用,此时支撑辊带动转动杆在凹槽内部运动,进而带动连接套杆同步移动,连接套杆挤压弹簧,此时固定杆发生弹性形变进行缓冲作用,减小力的作用,使驱动装置在前进过程中缓冲效果好,弹簧将力的作用传递至阻尼器进行分解,避免弹簧反复振动,通过该设计,可在移动前进过程中碰到障碍物时进行缓冲,使其行进过程更加稳定,提高了装置的实用性和稳定性。
技术特征:
1.一种水体生态环境用修复的水下清污机器人,其特征在于:包括主体支架(111)和机器人主体(112),所述主体支架(111)上端固定设置有机器人主体(112),所述主体支架(111)两侧设置有前进结构(2),所述主体支架(111)外部设置有缓冲结构(3),所述前进结构(2)包括固定板(211),所述固定板(211)设置在主体支架(111)两端,所述固定板(211)设置有两组,所述固定板(211)一组与主体支架(111)两端固定,所述固定板(211)侧壁固定设置有伺服电机(212),所述伺服电机(212)输出轴固定连接有转动辊(213),所述转动辊(213)表面通过齿条连接有履带(214),所述履带(214)设置在两组固定板(211)上。
2.根据权利要求1所述的一种水体生态环境用修复的水下清污机器人,其特征在于:所述履带(214)上设置有抓地板(215)。
3.根据权利要求1所述的一种水体生态环境用修复的水下清污机器人,其特征在于:所述固定板(211)两组之间设置有支架辊(216),所述支架辊(216)两端通过转轴与固定板(211)活动连接,所述支架辊(216)分别设置在由履带(214)组成的梯形拐角处。
4.根据权利要求1所述的一种水体生态环境用修复的水下清污机器人,其特征在于:所述固定板(211)两组之间设置有支撑辊(217),所述支撑辊(217)两端通过转轴活动连接在固定板(211)内部。
5.根据权利要求1所述的一种水体生态环境用修复的水下清污机器人,其特征在于:所述固定板(211)内部安装有连接杆(218),所述连接杆(218)内部安装有安装螺栓(219),且安装螺栓(219)安装在固定板(211)内部。
6.根据权利要求1所述的一种水体生态环境用修复的水下清污机器人,其特征在于:所述缓冲结构(3)包括转动杆(311),所述转动杆(311)固定设置在支撑辊(217)两端,所述转动杆(311)转动设置在凹槽(312)内部,所述凹槽(312)开设在固定板(211)内部,所述转动杆(311)表面转动套设有连接套杆(313),所述连接套杆(313)远离转动杆(311)的一端插设在固定柱(314)内部,所述固定柱(314)固定设置在凹槽(312)内壁,所述连接套杆(313)内部插设有固定杆(315),所述固定杆(315)表面缠绕有弹簧(316)。
7.根据权利要求6所述的一种水体生态环境用修复的水下清污机器人,其特征在于:所述弹簧(316)一端连接有阻尼器(317),所述阻尼器(317)安装在固定柱(314)内部。
8.根据权利要求6所述的一种水体生态环境用修复的水下清污机器人,其特征在于:所述连接套杆(313)侧壁固定连接有滑块(318),所述滑块(318)滑动设置在滑槽(319)内部,所述滑槽(319)开设在固定柱(314)内部。
9.根据权利要求1所述的一种水体生态环境用修复的水下清污机器人的使用方法,其特征在于:包括以下步骤:
技术总结
本发明公开了一种水体生态环境用修复的水下清污机器人及使用方法,属于水下废弃物清理机器人技术领域,本发明包括主体支架和机器人主体,主体支架上端固定设置有机器人主体,主体支架两侧设置有前进结构,主体支架外部设置有缓冲结构,前进结构包括固定板,固定板设置在主体支架两端,固定板设置有两组,固定板一组与主体支架两端固定,固定板侧壁固定设置有伺服电机,伺服电机输出轴固定连接有转动辊,转动辊表面通过齿条连接有履带,履带设置在两组固定板上。本发明可以在水底地面上进行移动清理,使用范围更广,清理效果更好,提高了装置的实用性和全面性。
技术研发人员:谈文,黄金坤,乐磊,刘宝堂,滕雁明
受保护的技术使用者:中国十七冶集团有限公司
技术研发日:
技术公布日:2024/9/19
- 还没有人留言评论。精彩留言会获得点赞!