一种自供磁场式磁软体水母机器人
本申请属于水下机器人,更具体地,涉及一种自供磁场式磁软体水母机器人。
背景技术:
1、水母机器人主要指形似水母的具有类水母运动模式的机器人,在水下资源勘探、环境监测、设备故障诊断等领域具有重要的应用价值和广阔的应用前景。
2、目前水母机器人多采用材料特性驱动和电磁驱动。相对于材料特性驱动,采用电磁驱动机制的水母机器人具有响应快、驱动力大、驱动电压低的特点。但是,目前电磁驱动的水母机器人均采用了刚性传动结构将电磁能转化为动能,其刚性传动结构存在结构复杂、工作噪音大和易伤害海底脆弱生物的缺陷。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本申请提供了一种自供磁场式磁软体水母机器人,其目的在于解决现有水母机器人中刚性传动结构过于复杂的技术问题。
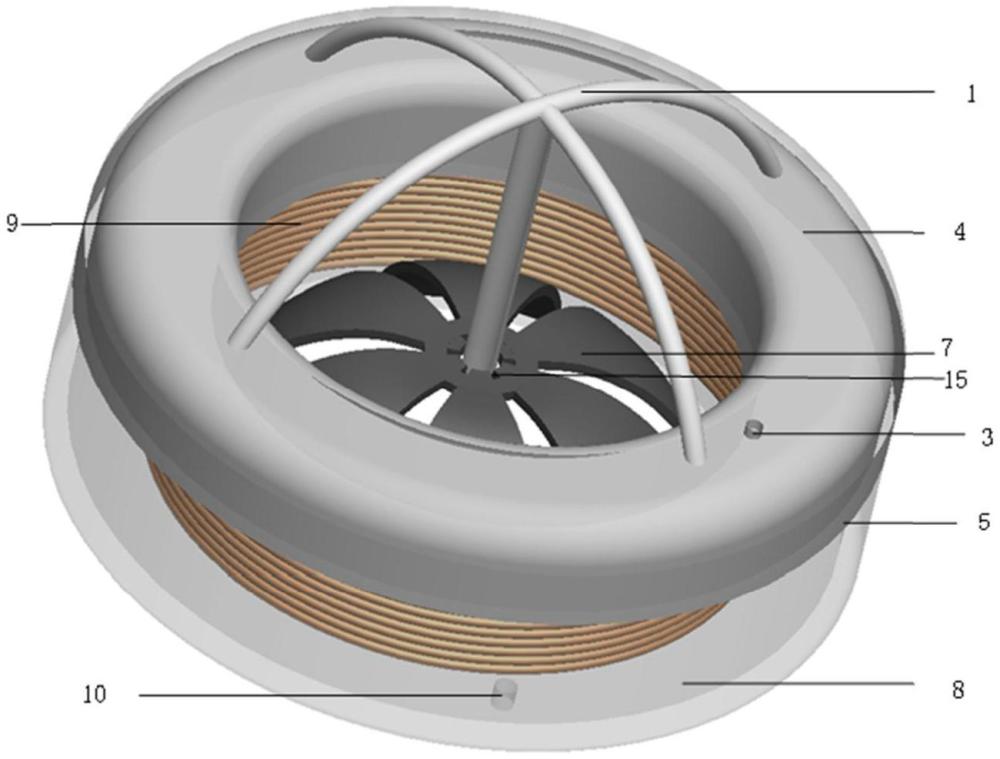
2、为实现上述目的,第一方面,本申请提供了一种自供磁场式磁软体水母机器人,包括:
3、电磁线圈,用于将电能转化为磁能,在电磁线圈的内部产生轴向磁场;
4、磁软体,为具有磁性的柔性结构,位于电磁线圈中;所述磁软体的部分固定在电磁线圈中,磁软体中非固定部分在电磁线圈产生的磁场驱动下在流体中向上或向下偏摆,产生反向推力,驱动水母机器人上浮或下沉;
5、密度调节腔,用于通过控制腔内气液比,来调节水母机器人的整体密度。
6、优选的,所述磁软体为平面中心对称结构。
7、优选的,所述磁软体的磁化方向与磁软体轴向之间的夹角θ满足:45°≤θ≤75°。
8、优选的,所述磁软体包括固定部分和多个翼片;所述固定部分用于将软磁体固定在电磁线圈的中央,并使软磁体垂直于电磁线圈轴向,所述翼片均匀的分布在固定部分的周围。
9、优选的,所述翼片的磁化方向与磁软体轴向之间的夹角θ满足:45°≤θ≤75。
10、优选的,所述翼片的形状为梯形。
11、优选的,还包括:微型电源,用于为电磁线圈提供电能。
12、优选的,还包括:防护腔,用于放置电磁线圈,将电磁线圈和外界环境隔绝;支架,用于将防护腔、磁软体和密度调节腔连接在一起;夹片,用于将磁软体的部分固定在支架上。
13、第二方面,本申请提供了一种自供磁场式磁软体水母机器人的控制方法,所述控制方法包括:
14、控制密度调节腔内腔内气液比,使得水母机器人能够悬浮在外界的流体中;
15、电磁线圈中通入预设波形的交变电流,使电磁线圈内产生轴向的交变磁场;
16、位于电磁线圈中磁软体在交变磁场的作用下发生形变,在流体中上下摆动,产生反向推力,驱动水母机器人上升或下降。
17、第三方面,本申请提供了一种水母机器人磁软体的制备方法,所述控制方法包括:
18、将磁性颗粒与柔性材料基质进行混合;
19、将混合均匀的混合物注入磁软体模具中,静置混合物直至混合物固化;
20、将固化后的混合物脱模,得到包括固定部分和多个翼片的磁软体;
21、将磁软体放置入磁化膜具中固定,并使磁软体的翼片与磁化磁场方向之间的角度为预设值;
22、将磁化膜具放入磁化磁场中对其中的磁软体进行充磁。
23、总体而言,通过本申请所构思的以上技术方案与现有技术相比,具有以下有益效果:
24、(1)本申请利用磁软体能根据外部磁场变化而产生形变的特性,用磁软体仿造水母的运动部位,在外部磁场的驱动下,磁软体仿照水母进行摆动,将电磁能转化为动能驱动水母机器人运动,由此解决了传统水母机器人中刚性传动结构过于复杂、工作噪音大和易伤害海底脆弱生物的缺陷。
25、(2)相对刚性传动结构而言,本申请中磁软体所需要的驱动电压更低,因此本申请将电源和电磁线圈也集成进水母机器人中,在满足小型化的前提下实现了一体化,摆脱了传统磁控水母机器人需要的庞大磁源,扩大了水母机器人的活动范围,为水母机器人的无线操控提供了实现基础。
26、(3)本申请水母机器人中的磁软体采用平面结构,相较于刚性传动结构体积更小,能在较小的尺寸结构下产生较大的推力。
27、(4)与传统磁控水母机器人以及材料特性驱动的水母机器人相比,本申请水母机器人的磁软体制备过程简单且成本低。
技术特征:
1.一种自供磁场式磁软体水母机器人,其特征在于,包括:
2.根据权利要求1所述的自供磁场式磁软体水母机器人,其特征在于,所述磁软体为平面中心对称结构。
3.根据权利要求1所述的自供磁场式磁软体水母机器人,其特征在于,所述磁软体的磁化方向与磁软体轴向之间的夹角θ满足:45°≤θ≤75°。
4.根据权利要求1所述的自供磁场式磁软体水母机器人,其特征在于,所述磁软体包括固定部分和多个翼片;所述固定部分用于将软磁体固定在电磁线圈的中央,并使软磁体垂直于电磁线圈轴向,所述翼片均匀的分布在固定部分的周围。
5.根据权利要求4所述的自供磁场式磁软体水母机器人,其特征在于,所述翼片的磁化方向与磁软体轴向之间的夹角θ满足:45°≤θ≤75。
6.根据权利要求4所述的自供磁场式磁软体水母机器人,其特征在于,所述翼片的形状为梯形。
7.根据权利要求1所述的自供磁场式磁软体水母机器人,其特征在于,还包括:
8.根据权利要求1所述的自供磁场式磁软体水母机器人,其特征在于,还包括:
9.一种自供磁场式磁软体水母机器人的控制方法,其特征在于,所述控制方法包括:
10.一种水母机器人磁软体的制备方法,其特征在于,所述制备方法包括:
技术总结
本申请公开了一种自供磁场式磁软体水母机器人,属于水下机器人技术领域。本申请包括磁软体、电磁线圈和密度调节腔,其中磁软体由磁性颗粒与硅胶混合制成;线圈有两种工作模式:一、通过连接引线的方式将外部电源设备与电磁线圈相连产生磁场;二、通过将微型电源置于水母内,实现电源与磁控系统的集成化,达到水母无外接引线即可实现自供电从而自供磁的效果。密度调节腔对水母机器人进行近水密度调节,使得水母机器人在没有能量输入的情况下在水中保持悬浮;电磁线圈为水母机器人提供特定波形的磁场,磁软体在磁场的作用下发生形变,使水母机器人实现可控的上浮下潜功能,为实现资源勘测及水下复杂环境的探测提供了有效的途径。
技术研发人员:乌小涵,曹全梁,朱鑫辉,李亮
受保护的技术使用者:华中科技大学
技术研发日:
技术公布日:2024/10/17
- 还没有人留言评论。精彩留言会获得点赞!