一种主动补偿位置偏差的水下对接坞的制作方法
本发明涉及水下船坞,尤其涉及一种主动补偿位置偏差的水下对接坞。
背景技术:
1、水下机器人有限的机载能源是限制其作业时间和任务类型的主要瓶颈,实现自动化的水下能源补给是提高水下机器人作业效率的关键。利用水下对接坞,既可以间歇性地为水下机器人补充能源并实现数据指令的上传下达,又能实现高海况下对水下机器人的安全防护。
2、中国cn111874194a公开了一种auv水下停靠坞和基于浮标与auv的海洋环境观测平台,水下停靠坞通常为柱形框架,一端开口一端封闭,开口端会设置漏斗状的护网,在护网外边缘上设置多个光学引导装置引导水下机器人移动进入并停靠在水下停靠坞内。但目前的水下对接坞的进入端的位置处于几何约束下而固定不动,造成水下坞与水下机器人的对接过程中存在位置偏差时,水下坞适应能力不足,水下机器人需要反复调整对接位置才能准确进入到水下坞的开口内,造成水下机器人耗费较长的对接时间以及损耗较多的能源,导致对接成功率低。
技术实现思路
1、有鉴于此,本发明提出了一种主动补偿位置偏差的水下对接坞,用于解决水下坞与水下机器人的对接过程中存在位置偏差时,水下机器人需要反复调整对接位置才能准确进入到水下坞的开口内,造成水下机器人耗费较长的对接时间以及损耗较多的能源的问题。
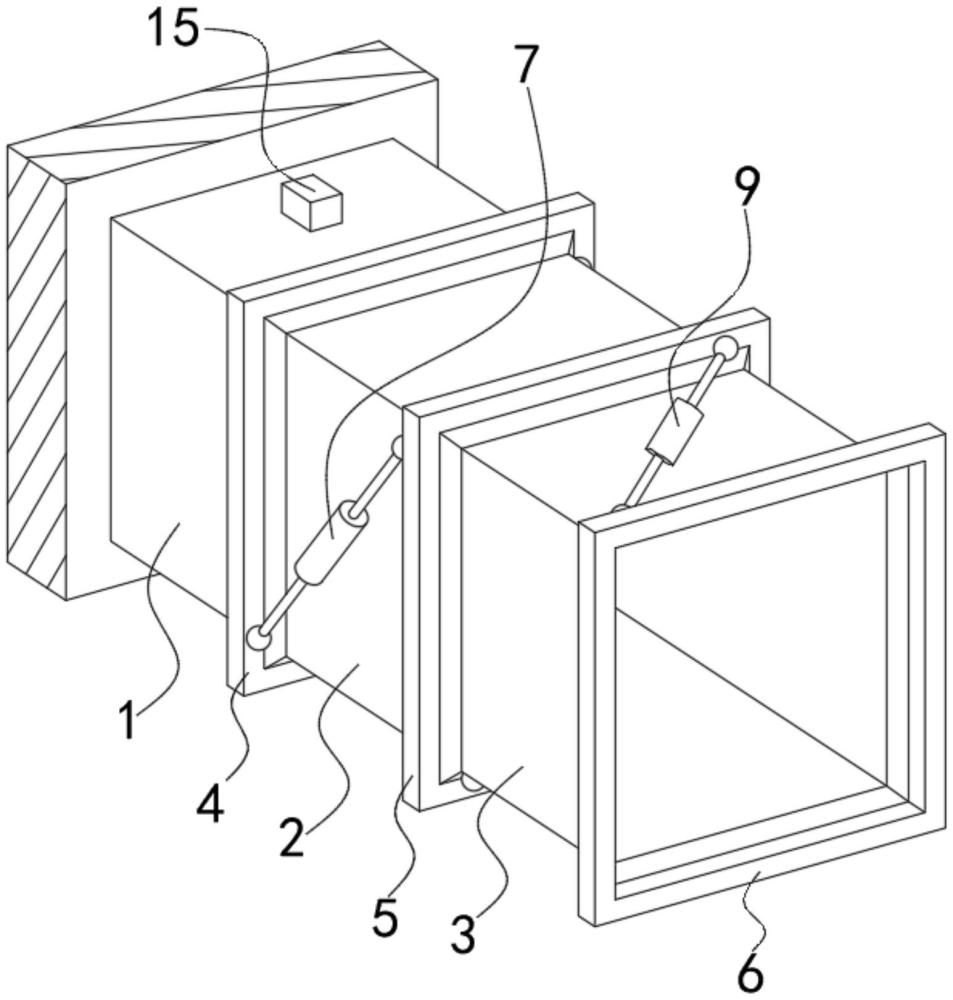
2、本发明的技术方案是这样实现的:本发明提供了一种主动补偿位置偏差的水下对接坞,包括固定部,其一端在水下设置于一固定位置,且另一端水平延伸;第一活动部,其一端连接在固定部上,另一端相对于固定部沿水平面的垂直方向移动;第二活动部,其一端连接在第一活动部的自由端上,另一端相对于固定部沿固定部的径向水平移动;其中,固定部、第一活动部及第二活动部连成中空的筒体,第二活动部远离固定部的一端敞开并用于水下航行器进入筒体内。
3、在以上技术方案的基础上,优选的,还包括第一框体,连接在固定部与第一活动部之间;第二框体,连接在第一活动部与第二活动部之间;第三框体,连接在第二活动部远离固定部的端部;其中,第一框体上开设有第一窗口,第二框体上开设有第二窗口,第三框体上开设有第三窗口,第一窗口、第二窗口及第三窗口的朝向均为固定部轴向的平行方向;第一活动部发生形变,使第一活动部的轴向与固定部的轴向相交叉,并使第二框体相对于第一框体沿水平面的垂直方向移动,且使第一窗口与第二窗口错开;第二活动部发生形变,使第二活动部的轴向与固定部的轴向相交叉,使第三框体相对于第一框体沿固定部的径向水平移动,并使第三窗口与第一窗口或者第二窗口错开。
4、更进一步优选的,还包括第一伸缩机构及第二伸缩机构,均设置在第一框体及第二框体之间;第三伸缩机构及第四伸缩机构,均设置在第二框体及第三框体之间;其中,第一伸缩机构及第二伸缩机构分别设置在第一活动部的左右两侧,第一伸缩机构及第二伸缩机构的两端均分别连接在第一框体及第二框体上,第一伸缩机构及第二伸缩机构的延伸方向均与第一活动部的轴向交叉设置;当第一活动部的轴向与固定部的轴向相平行时,第一伸缩机构及第二伸缩机构的延伸方向沿第一活动部的轴向对称设置;第三伸缩机构及第四伸缩机构分别设置在第二活动部的上下两侧,第三伸缩机构及第四伸缩机构的两端均分别连接在第二框体及第三框体上,第三伸缩机构及第四伸缩机构的延伸方向均与第二活动部的轴向交叉设置;当第二活动部的轴向与固定部的轴向相平行时,第三伸缩机构及第四伸缩机构的延伸方向沿第二活动部的轴向对称设置。
5、更进一步优选的,还包括四个第一支杆,环绕第一活动部两两对称的设置在第一框体及第二框体之间;四个第二支杆,环绕第二活动部两两对称的设置在第二框体及第三框体之间;其中,第一支杆两端的延伸方向与第一活动部的轴向相平行,第一支杆两端分别铰连接在第一框体及第二框体上;四个第一支杆以上下为一组,第一伸缩机构的两端分别铰连接在其中一组的两个第一支杆上,第二伸缩机构的两端分别铰连接在另一组的两个第一支杆上;第二支杆两端的延伸方向与第二活动部的轴向相平行,第二支杆两端分别铰连接在第二框体及第三框体上;四个第二支杆以左右为一组,第三伸缩机构的两端分别铰连接在其中一组的两个第二支杆上,第四伸缩机构的两端分别铰连接在另一组的两个第二支杆上。
6、更进一步优选的,第一支杆的其中一端围绕另一端上下摆动并限制其左右摆动,第二支杆的其中一端围绕另一端左右摆动并限制其上下摆动。
7、更进一步优选的,上下相邻的两个第一支杆的间距小于固定部沿垂直方向的高度,左右相邻的两个第二支杆的间距小于固定部沿水平方向的宽度。
8、更进一步优选的,还包括护网,设置在第三框体远离固定部的一侧;其中,护网为漏斗状且与第三窗口相连通,护网与第三框体相连一端的内径小于护网远离第三框体一端的内径。
9、更进一步优选的,还包括蒙皮,敷设在筒体内壁上以及护网的内壁上;其中,蒙皮随第一活动部或者第二活动部的形变而发生弹性拉伸或者收缩回弹。
10、更进一步优选的,还包括声学引导机构,设置在固定部的外壁上;若干光学引导机构,环绕护网的中轴线并均匀布设在护网远离固定部一端的边缘上;其中,声学引导机构通过超声波引导水下航行器接近水下对接坞;光学引导机构通过激光或者相机视觉引导水下航行器的艏部通过第三窗口进入到第二活动部内。
11、在以上技术方案的基础上,优选的,还包括锁止机构,设置在固定部内;吸盘机构,设置在第二活动部内;其中,锁止机构用于锁紧固定住进入筒体内的水下航行器的艏部;吸盘机构用于吸附住水下航行器进入到第二活动部内的艏部。
12、本发明的一种主动补偿位置偏差的水下对接坞相对于现有技术具有以下有益效果:
13、(1)本发明通过两个可形变的活动部,调整两个活动部的端部使水下坞的进口与水下机器人的所在位置进行对齐,实现根据水下机器人或者航行器的深度位置以及横移位置进行位置补偿,使水下机器人能够进入第二活动部内后,随着两个活动部复位而形成笔直的筒体后,水下机器人完全进入水下坞的筒体结构内进行对接停靠。
14、(2)本发明通过在相邻框体之间铰连接设置支杆,并将伸缩机构的两端铰连接在支杆上,在使固定部与两个活动部能够稳固连接成一个筒整体,并能够通过各伸缩机构的伸缩情况来驱使两个活动部进行形变,以对水下坞进口与水下机器人的相对位置进行调整。
15、(3)本发明在水下机器人的艏部进入第二活动部后,先通过吸盘机构暂时吸附住艏部以避免两个活动部复位时水下机器人脱离水下坞,而当水下机器人完全进入到水下坞的筒体内后,通过锁止机构锁紧固定水下机器人的艏部,实现水下机器人与水下坞的对接停靠。
技术特征:
1.一种主动补偿位置偏差的水下对接坞,其特征在于,包括:
2.根据权利要求1所述的一种主动补偿位置偏差的水下对接坞,其特征在于,还包括:
3.根据权利要求2所述的一种主动补偿位置偏差的水下对接坞,其特征在于,还包括:
4.根据权利要求3所述的一种主动补偿位置偏差的水下对接坞,其特征在于,还包括:
5.根据权利要求4所述的一种主动补偿位置偏差的水下对接坞,其特征在于:所述第一支杆(11)的其中一端围绕另一端上下摆动并限制其左右摆动,所述第二支杆(12)的其中一端围绕另一端左右摆动并限制其上下摆动。
6.根据权利要求4所述的一种主动补偿位置偏差的水下对接坞,其特征在于:上下相邻的两个所述第一支杆(11)的间距小于固定部(1)沿垂直方向的高度,左右相邻的两个所述第二支杆(12)的间距小于固定部(1)沿水平方向的宽度。
7.根据权利要求2所述的一种主动补偿位置偏差的水下对接坞,其特征在于,还包括:
8.根据权利要求7所述的一种主动补偿位置偏差的水下对接坞,其特征在于,还包括:
9.根据权利要求8所述的一种主动补偿位置偏差的水下对接坞,其特征在于,还包括:
10.根据权利要求1所述的一种主动补偿位置偏差的水下对接坞,其特征在于,还包括:
技术总结
本发明提出了一种主动补偿位置偏差的水下对接坞,属于水下船坞领域,包括固定部一端在水下设置于一固定位置且另一端水平延伸;第一活动部一端连接在固定部上且另一端相对于固定部沿水平面的垂直方向移动;第二活动部一端连接在第一活动部的自由端上且另一端相对于固定部沿固定部的径向水平移动;固定部、第一活动部及第二活动部连成中空的筒体。本发明通过两个可形变的活动部,调整两个活动部的端部使水下坞的进口与水下机器人的所在位置进行对齐,实现根据水下机器人或者航行器的深度位置以及横移位置进行位置补偿,使水下机器人能够进入第二活动部内后,随着两个活动部复位而形成笔直的筒体后,水下机器人进入水下坞的筒体结构内对接停靠。
技术研发人员:马哲松,王嘉,付少波,王鹏,陈伟,张宇昂,刘俊杰,陈虹
受保护的技术使用者:中国船舶集团有限公司第七一九研究所
技术研发日:
技术公布日:2024/11/11
- 还没有人留言评论。精彩留言会获得点赞!