一种带重心自适应调节装置的无人船
本发明涉及无人船,具体为一种带重心自适应调节装置的无人船。
背景技术:
1、是一种无需人类船员操作的水面航行器,它通常依靠自动化技术、遥控系统或自主系统进行导航和控制。双体船,即两个并排的船体通过横梁连接,通常提供更好的稳定性和航行性能。双体船具有较低的波浪激励、较大速度时的湿表面积减少以及较小的波浪反射,这对减少高速时的摩擦阻力很有利。
2、双体船的重心位置对船只的稳定性至关重要。如果重心过高或偏后,船只的稳定性会大大降低,容易导致倾覆。特别是无人船,由于没有人工操作来实时调整重心位置,船只的稳定性会进一步降低,增加翻船的风险。双体船通常由两个船体组成,每个船体提供一定的浮力。如果重心位置不当,船体之间的受力分布会受到影响。例如,重心偏后时,船尾的浮力可能过大,导致船尾下沉,而船头则会抬起,进一步削弱船体的稳定性。特别是在高速航行时,这种不平衡可能使船体处于不稳定状态,增加翻船的风险。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种带重心自适应调节装置的无人船,解决了无人船缺乏实时调整,容易导致受力不均,船体不稳定,增加翻船风险的问题。
3、(二)技术方案
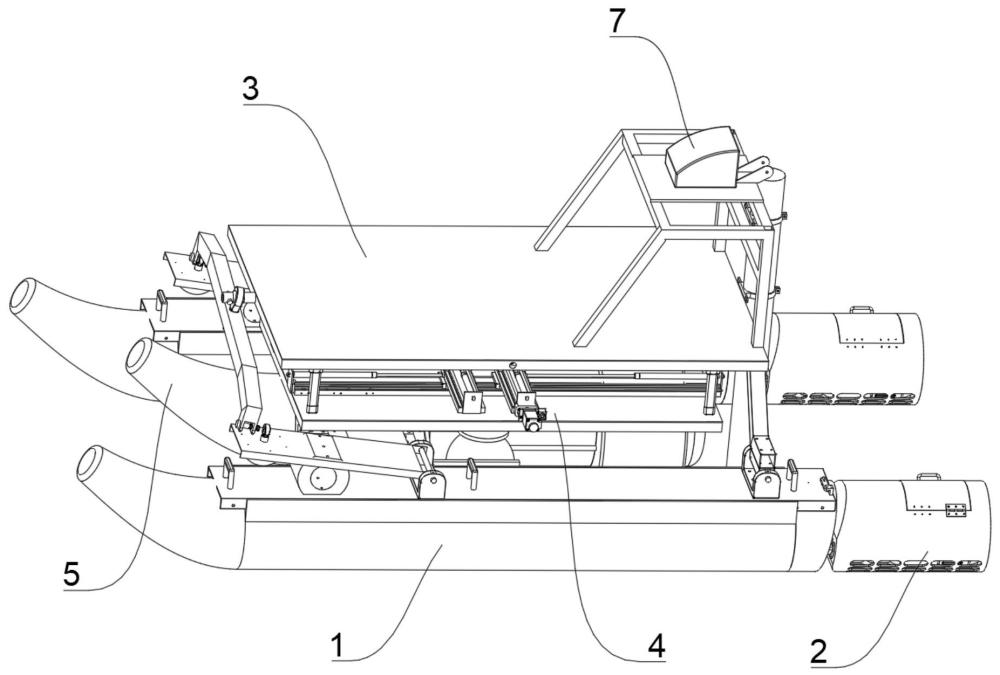
4、为实现上述目的,本发明提供如下技术方案:一种带重心自适应调节装置的无人船,包括:支撑浮体,用于提供船体的浮力并支撑整体结构;驱动机构,用于为双体船提供必要的动力;横梁机构,用于连接支撑浮体与船的主体;重心偏移机构,用于在船体重心偏移时提供移动重物来平衡重心;横向稳定机构,用于在船开得太快时前部翘起时扶正船身;两侧稳定机构,用于应对船横向的倾斜时扶正船身,重心自适应调节装置,主要由无线信号接收器、控制单元、压力传感器、姿态传感器、两轴倾角传感器组成。
5、优选的,所述驱动机构固定连接在支撑浮体的外壁。
6、优选的,所述横梁机构,所述横梁机构包括连接支撑板,所述连接支撑板固定连接在支撑浮体的顶部,所述连接支撑板的顶部铰接有尾部支撑柱,所述尾部支撑柱的顶部固定连接有顶部平台所述连接支撑板的顶部固定连接有柔性圈的一端,所述柔性圈的另一端固定连接有前部连接板,所述前部连接板的顶部铰接有前连接梁。
7、优选的,所述所述前连接梁的顶部与顶部平台固定连接,所述前部连接板的底部与连接支撑板铰接。
8、优选的,所述重心偏移机构包括伸缩缸,所述伸缩缸固定连接在顶部平台的底部,所述伸缩缸的输出轴固定连接有底部平台,所述底部平台的顶部固定连接有横向电动滑轨,所述底部平台的顶部固定连接有辅助横向滑轨,所述横向电动滑轨的顶部固定连接有纵向电动滑轨,所述横向电动滑轨的顶部固定连接有辅助纵向滑轨,所述纵向电动滑轨的顶部固定连接有电池,所述辅助纵向滑轨的顶部固定连接有电池。
9、优选的,所述辅助横向滑轨的顶部固定连接有纵向电动滑轨,所述辅助横向滑轨的顶部固定连接有辅助纵向滑轨。
10、优选的,所述横向稳定机构包括竖向衔接板,所述竖向衔接板固定连接在底部平台的底部,所述竖向衔接板的底部固定连接有中部浮体,所述中部浮体的外壁固定连接有环型气囊,所述环型气囊位于中部浮体靠后的部位,所述环型气囊的外壁固定连接有中空连接管的一端。
11、优选的,所述两侧稳定机构包括弹簧,所述弹簧的两侧固定连接在中部浮体的内壁上,所述弹簧的中部固定连接有u型件,所述中部浮体的内壁上固定连接有中空连接柱,所述中空连接柱的两侧固定连接有球型气囊,所述竖向衔接板的外壁固定连接有旁侧固定杆,所述旁侧固定杆的内壁滑动连接有竖向导向柱,所述竖向导向柱的底部固定连接有顶部圆盘,所述顶部圆盘的外壁固定连接有接触连接杆,所述u型件的外壁固定连接有斜向传动杆,所述u型件的内壁上固定连接有传动件。
12、优选的,所述中部浮体的内壁上设置有滚珠,所述滚珠与u型件的外壁抵触,所述中空连接管的另一端与中空连接柱固定连接。
13、(三)有益效果
14、与现有技术相比,本发明提供了一种带重心自适应调节装置的无人船,具备以下有益效果:
15、1、该带重心自适应调节装置的无人船,利用重心偏移机构设置,当重心自适应调节装置检测到无人船运行环境较为平缓时,可以通过伸缩缸将底部平台下降,底部平台带动竖向衔接板、中部浮体向下移动,从而增大中部浮体的接触水的面积,从而能够扩大船的湿表面积,从而在高速运行时能够充分减少摩擦阻力,当重心自适应调节装置检测到无人船运行环境较为恶劣时,可以带动电池调控重心,并能将速度适当降低,从而保持运行安全。
16、2、该带重心自适应调节装置的无人船,利用竖向衔接板设置,当船身左右的纵向偏移,此时偏移一侧的球型气囊与水接触,在水压作用下偏移一侧的球型气囊被压缩,内部的空气通过中空连接柱进入另一侧的球型气囊,另一侧的球型气囊膨胀抵触u型件向远离偏移一侧的方向移动,使得重心向远离偏移一侧的方向移动,这一过程的作用是通过调整重心的位置来恢复船身的平衡,减少船体的倾斜或摇摆,提高船只的稳定性,防止船体进一步失衡或翻覆。
17、3、该带重心自适应调节装置的无人船,利用两侧稳定机构设置,当船速度太快导致前部翘起时,船的尾部与水接触较多,此时环型气囊与水接触被压缩,环型气囊内的空气通过中空连接管进入中空连接柱,再进入中空连接柱、球型气囊,球型气囊膨胀抵触传动件,使得传动件带动u型件向船的前部移动,使得船的重心向船的前部移动,进一步的确保船只保持水平,防止船体继续倾斜或不稳定,有助于提升船体的整体稳定性和航行安全性。
技术特征:
1.一种带重心自适应调节装置的无人船,其特征在于:包括:
2.根据权利要求1所述的一种带重心自适应调节装置的无人船,其特征在于:所述驱动机构(2)固定连接在支撑浮体(1)的外壁。
3.根据权利要求1所述的一种带重心自适应调节装置的无人船,其特征在于:所述横梁机构(3),所述横梁机构(3)包括连接支撑板(31),所述连接支撑板(31)固定连接在支撑浮体(1)的顶部,所述连接支撑板(31)的顶部铰接有尾部支撑柱(32),所述尾部支撑柱(32)的顶部固定连接有顶部平台(33)所述连接支撑板(31)的顶部固定连接有柔性圈(34)的一端,所述柔性圈(34)的另一端固定连接有前部连接板(35),所述前部连接板(35)的顶部铰接有前连接梁(36)。
4.根据权利要求3所述的一种带重心自适应调节装置的无人船,其特征在于:所述所述前连接梁(36)的顶部与顶部平台(33)固定连接,所述前部连接板(35)的底部与连接支撑板(31)铰接。
5.根据权利要求3所述的一种带重心自适应调节装置的无人船,其特征在于:所述重心偏移机构(4)包括伸缩缸(41),所述伸缩缸(41)固定连接在顶部平台(33)的底部,所述伸缩缸(41)的输出轴固定连接有底部平台(42),所述底部平台(42)的顶部固定连接有横向电动滑轨(43),所述底部平台(42)的顶部固定连接有辅助横向滑轨(44),所述横向电动滑轨(43)的顶部固定连接有纵向电动滑轨(45),所述横向电动滑轨(43)的顶部固定连接有辅助纵向滑轨(46),所述纵向电动滑轨(45)的顶部固定连接有电池(47),所述辅助纵向滑轨(46)的顶部固定连接有电池(47)。
6.根据权利要求5所述的一种带重心自适应调节装置的无人船,其特征在于:所述辅助横向滑轨(44)的顶部固定连接有纵向电动滑轨(45),所述辅助横向滑轨(44)的顶部固定连接有辅助纵向滑轨(46)。
7.根据权利要求5所述的一种带重心自适应调节装置的无人船,其特征在于:所述横向稳定机构(5)包括竖向衔接板(51),所述竖向衔接板(51)固定连接在底部平台(42)的底部,所述竖向衔接板(51)的底部固定连接有中部浮体(52),所述中部浮体(52)的外壁固定连接有环型气囊(53),所述环型气囊(53)位于中部浮体(52)靠后的部位,所述环型气囊(53)的外壁固定连接有中空连接管(54)的一端。
8.根据权利要求7所述的一种带重心自适应调节装置的无人船,其特征在于:所述两侧稳定机构(6)包括弹簧(61),所述弹簧(61)的两侧固定连接在中部浮体(52)的内壁上,所述弹簧(61)的中部固定连接有u型件(62),所述中部浮体(52)的内壁上固定连接有中空连接柱(63),所述中空连接柱(63)的两侧固定连接有球型气囊(64),所述竖向衔接板(51)的外壁固定连接有旁侧固定杆(65),所述旁侧固定杆(65)的内壁滑动连接有竖向导向柱(66),所述竖向导向柱(66)的底部固定连接有顶部圆盘(67),所述顶部圆盘(67)的外壁固定连接有接触连接杆(68),所述u型件(62)的外壁固定连接有斜向传动杆(69),所述u型件(62)的内壁上固定连接有传动件(610)。
9.根据权利要求8所述的一种带重心自适应调节装置的无人船,其特征在于:所述中部浮体(52)的内壁上设置有滚珠(611),所述滚珠(611)与u型件(62)的外壁抵触,所述中空连接管(54)的另一端与中空连接柱(63)固定连接。
技术总结
本发明涉及无人船技术领域,且公开了一种带重心自适应调节装置的无人船,包括:支撑浮体,用于提供船体的浮力并支撑整体结构;驱动机构,用于为双体船提供必要的动力;横梁机构,用于连接支撑浮体与船的主体。该带重心自适应调节装置的无人船,利用重心偏移机构设置,当重心自适应调节装置检测到无人船运行环境较为平缓时,可以通过伸缩缸将底部平台下降,底部平台带动竖向衔接板、中部浮体向下移动,从而增大中部浮体的接触水的面积,从而能够扩大船的湿表面积,从而在高速运行时能够充分减少摩擦阻力,当重心自适应调节装置检测到无人船运行环境较为恶劣时,可以带动电池调控重心,并能将速度适当降低,从而保持运行安全。
技术研发人员:王宗省,孙绪,王善超,王儒涛,张睿智,李洪宇,马卫状,刘成明,李焕勇,杨宏哲
受保护的技术使用者:山东科技大学
技术研发日:
技术公布日:2025/1/6
- 还没有人留言评论。精彩留言会获得点赞!