一种防缠绕水污染监测用水下机器人的制作方法
本技术涉及水下机器人,特别涉及一种防缠绕水污染监测用水下机器人。
背景技术:
1、水污染监测用水下机器人是一种专门设计用于在水下环境中监测水质和水体污染的机器人,可以实时监测水体的污染情况,对水下环境进行图像和声音采集,目前水污染监测用水下机器人已经被广泛应用于各种环境中,包括河流、湖泊、海洋等水域,它们可以在水下环境中自主操作,收集水体样本并进行分析,实时监测水质参数,并将数据传输到地面控制中心进行分析和处理,但是机器人在水下容易被缠绕物缠住,而且出现故障或需要升级,不方便进行更换和维修,中国专利公开了一种“防缠绕水污染监测用水下机器人”,其申请号为“cn202121937412.x”,其通过第二液压伸缩杆对第二活动块进行上下运动,第二活动块上下活动的同时电机带动刀片对后方进入的海藻等其他水生杂草进行割断,避免了机器人主体受到缠绕的情况,但是其无法解决出现故障或需要升级,不方便进行更换和维修的问题。
技术实现思路
1、本实用新型的目的在于至少解决现有技术中存在的技术问题之一,提供一种防缠绕水污染监测用水下机器人,通过机器人主体、外壳和固定板均为装配式,出现故障或需要升级,可以更方便地进行部件更换和维修,而且可以分开制造和装配,从而提高生产效率;通过电机转动丝杆伸出刀片,再由液压杆进行上下滑动,来切断缠绕物,根据需要实现精确的切割动作,确保切断缠绕物的效果,实现高效的切割操作。
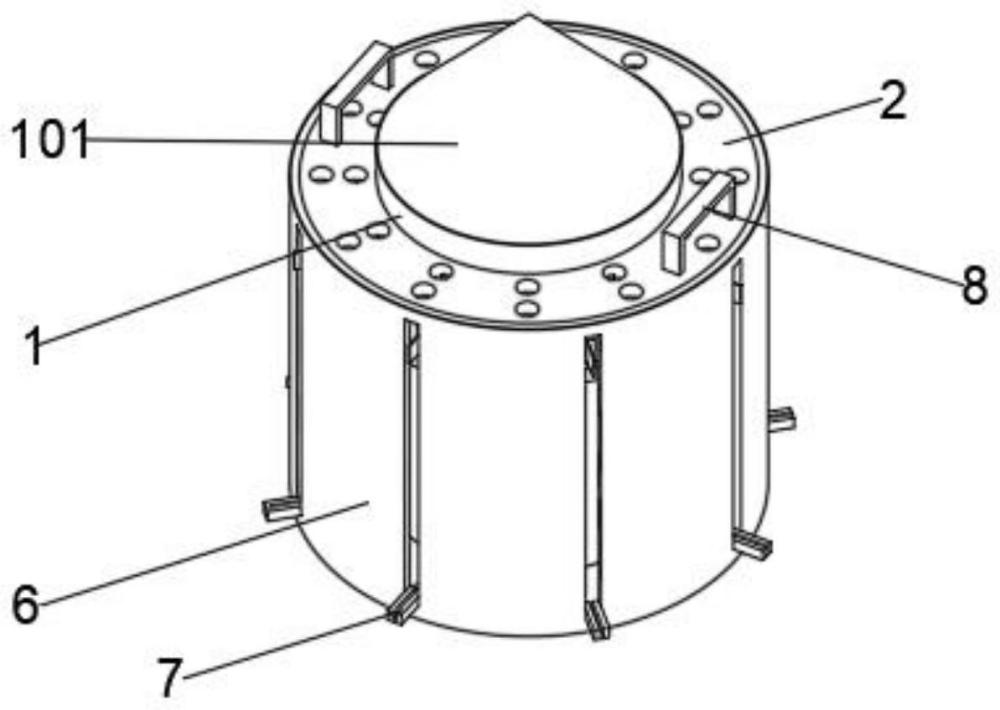
2、本实用新型还提供具有上述一种防缠绕水污染监测用水下机器人,包括:机器人主体,所述机器人主体的外表面可拆卸连接有固定板,所述固定板的下表面固定连接有液压杆,所述液压杆的输出端固定连接有滑动环,所述滑动环的外表面固定连接有防缠绕装置,所述固定板的下表面可拆卸连接有外壳,所述外壳的外表面设置有口,所述口的内壁固定连接有磨刀架;所述防缠绕装置包括固定架,所述固定架的外表面固定连接有电机,所述电机的输出端通过轴连接有丝杆,所述丝杆的外表面螺纹连接有滑动板,所述滑动板的外表面固定连接有刀片。
3、根据本实用新型所述的一种防缠绕水污染监测用水下机器人,所述机器人主体的下表面设置有推进装置,所述机器人主体的下表面可拆卸连接有挡板,挡板可以防止水草、绳索等杂物缠绕在推进装置上,使机器人在水中更加稳定地移动和避免缠绕。
4、根据本实用新型所述的一种防缠绕水污染监测用水下机器人,所述推进装置的位置与挡板的位置相对,所述机器人主体的上表面设置有锥头,通过锥头的设置,减少水流阻力,使机器人在水中更加流线型,降低水阻,提高运动效率。
5、根据本实用新型所述的一种防缠绕水污染监测用水下机器人,所述固定板的上表面固定连接有把手,所述滑动环的内壁与机器人主体滑动连接,使得机器人更容易进行携带和操作,提高了机器人的便携性和操控性。
6、根据本实用新型所述的一种防缠绕水污染监测用水下机器人,所述滑动环的外表面设置有槽,所述槽的内壁与电机固定连接,使电机可以有效地传递动力。
7、根据本实用新型所述的一种防缠绕水污染监测用水下机器人,所述固定架的外表面与滑动环固定连接,所述滑动板的下表面与固定架滑动连接,确保各部件之间的稳固连接,提高了机器人的结构稳定性和耐久性。
8、根据本实用新型所述的一种防缠绕水污染监测用水下机器人,所述刀片安装在外壳的内部,所述刀片的外表面与外壳活动连接,减少外部物体对刀片的干扰,延长刀片的使用寿命。
9、根据本实用新型所述的一种防缠绕水污染监测用水下机器人,所述固定板的上表面和外壳的下表面均设置有透水孔,所述刀片的外表面与磨刀架相抵接,透水孔可以使水流顺利通过,减少水流对机器人运动的阻力,提高机器人的运动效率。
10、有益效果
11、1、与现有技术相比,该一种防缠绕水污染监测用水下机器人,通过机器人主体、外壳和固定板均为装配式,出现故障或需要升级,可以更方便地进行部件更换和维修,而且可以分开制造和装配,从而提高生产效率。
12、2、与现有技术相比,该一种防缠绕水污染监测用水下机器人,通过电机转动丝杆伸出刀片,再由液压杆进行上下滑动,来切断缠绕物,根据需要实现精确的切割动作,确保切断缠绕物的效果,实现高效的切割操作。
技术特征:
1.一种防缠绕水污染监测用水下机器人,其特征在于,包括:
2.根据权利要求1所述的一种防缠绕水污染监测用水下机器人,其特征在于,所述机器人主体(1)的下表面设置有推进装置,所述机器人主体(1)的下表面可拆卸连接有挡板(102)。
3.根据权利要求2所述的一种防缠绕水污染监测用水下机器人,其特征在于,所述推进装置的位置与挡板(102)的位置相对,所述机器人主体(1)的上表面设置有锥头(101)。
4.根据权利要求1所述的一种防缠绕水污染监测用水下机器人,其特征在于,所述固定板(2)的上表面固定连接有把手(8),所述滑动环(4)的内壁与机器人主体(1)滑动连接。
5.根据权利要求1所述的一种防缠绕水污染监测用水下机器人,其特征在于,所述滑动环(4)的外表面设置有槽,所述槽的内壁与电机(502)固定连接。
6.根据权利要求1所述的一种防缠绕水污染监测用水下机器人,其特征在于,所述固定架(501)的外表面与滑动环(4)固定连接,所述滑动板(504)的下表面与固定架(501)滑动连接。
7.根据权利要求1所述的一种防缠绕水污染监测用水下机器人,其特征在于,所述刀片(505)安装在外壳(6)的内部,所述刀片(505)的外表面与外壳(6)活动连接。
8.根据权利要求1所述的一种防缠绕水污染监测用水下机器人,其特征在于,所述固定板(2)的上表面和外壳(6)的下表面均设置有透水孔,所述刀片(505)的外表面与磨刀架(7)相抵接。
技术总结
本技术公开了一种防缠绕水污染监测用水下机器人,其包括:机器人主体的外表面可拆卸连接有固定板,固定板的下表面固定连接有液压杆,液压杆的输出端固定连接有滑动环,滑动环的外表面固定连接有防缠绕装置,固定板的下表面可拆卸连接有外壳,外壳的外表面设置有口,口的内壁固定连接有磨刀架;通过机器人主体、外壳和固定板均为装配式,出现故障或需要升级,可以更方便地进行部件更换和维修,而且可以分开制造和装配,从而提高生产效率;通过电机转动丝杆伸出刀片,再由液压杆进行上下滑动,来切断缠绕物,根据需要实现精确的切割动作,确保切断缠绕物的效果,实现高效的切割操作。
技术研发人员:顾忠芹,刘宇,戴路,龙小虎
受保护的技术使用者:江苏中信安全环境科技有限公司
技术研发日:20240124
技术公布日:2024/12/10
- 还没有人留言评论。精彩留言会获得点赞!