一种自动组网海域监测无人艇的制作方法
本技术涉及无人艇,特别是涉及一种自动组网海域监测无人艇。
背景技术:
1、无人艇作为一种无人海洋智能运载平台,具有自主规划及自主航行能力。其在军事和民用领域具有极其广泛的应用前景,如:反潜、反鱼雷、情报监视与侦查,以及海洋监测、海洋气象预报、海洋生物研究、海图绘制、通信中继等诸多用途。
2、目前在进行海域监测时,一般是多艘无人艇同时使用。但是现有的无人艇在使用时,遇到卫星通信及通信基站信号无法连接的情况,存在无法多艘无人艇互联,形成通信网络互相传递信息的问题。
3、在申请号为:201521018483.4,公开号为cn205209491u的实用新型中公开了一种无人艇,包括电源装置、推动装置、主艇体以及位于主艇体两侧的两个辅助艇体,主艇体内设有数据采集中心、惯性导航系统、多波束测深仪、gps定位系统以及控制模块,但是其在使用时,遇到卫星通信及通信基站信号无法链接的情况,依旧存在无法多艘无人艇互联,形成通信网络互相传递信息的问题。
技术实现思路
1、基于此,针对上述问题,本实用新型提出了一种自动组网海域监测无人艇,解决了现有的无人艇在使用时,遇到卫星通信及通信基站信号无法链接的情况,存在无法多艘无人艇互联,形成通信网络互相传递信息的问题。
2、本实用新型的技术方案是:
3、一种自动组网海域监测无人艇,包括控制模块、海域视频信息采集模块、gps定位导航模块、局域网通信模块和艇体;
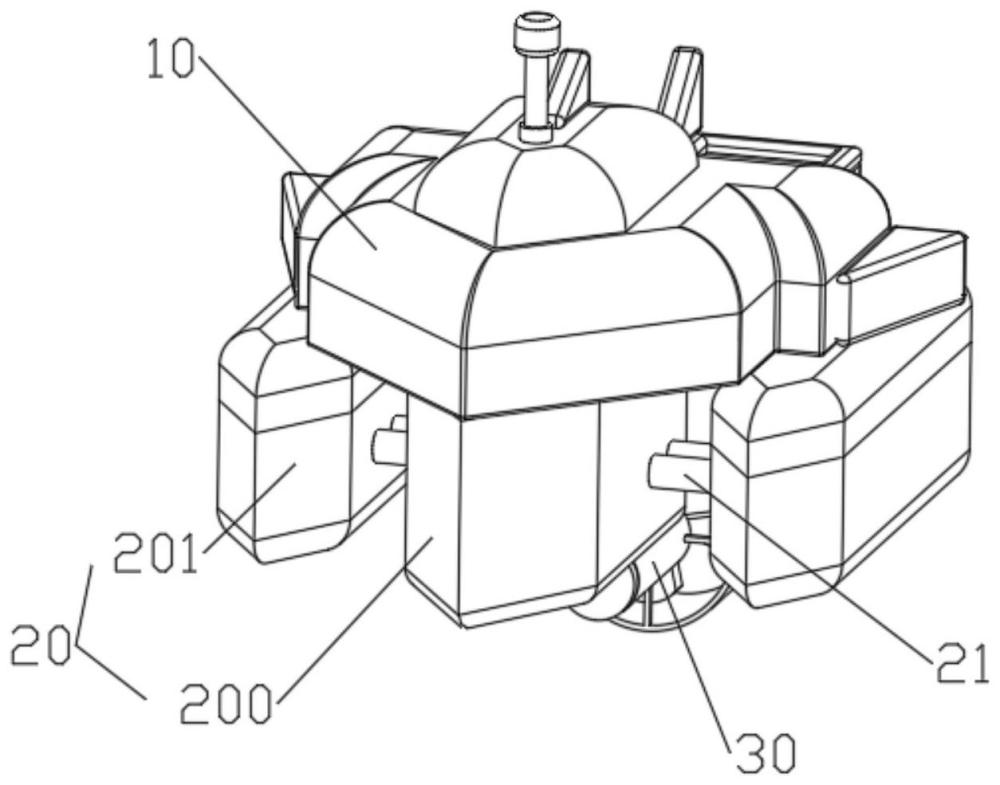
4、艇体包括无人艇主体、浮体部和动力部,无人艇主体设置在浮体部顶部,动力部设置在无人艇主体的底部,且与浮体部配合设置,浮体部用于使无人艇漂浮在海面上,动力部用于驱动无人艇移动;
5、控制模块、海域视频信息采集模块、gps定位导航模块和局域网通信模块设置在无人艇主体内,其中,海域视频信息采集模块用于拍摄采集海域信息,gps定位导航模块用于导航定位,局域网通信模块用于使无人艇接入无线局域网进行组网通信和数据传输。
6、优选的是,无人艇主体内设有安装腔体,控制模块、海域视频信息采集模块、gps定位导航模块和局域网通信模块设置在安装腔体内。
7、优选的是,浮体部包括主浮体和设置在主浮体两侧的一对平衡浮体,主浮体与平衡浮体之间通过连接件连接。
8、优选的是,平衡浮体包括上浮体和配重水箱,上浮体设置在配重水箱顶部,连接件一端与配重水箱固定连接,另一端与主浮体固定连接。
9、优选的是,配重水箱上设有水源口,水源口处设有堵塞头,堵塞头与水源口螺纹连接。
10、优选的是,动力部包括第一防水箱、第二防水箱、电源、转向电机、传动齿轮组、转动轴、防水罩、驱动电机、驱动叶轮和保护罩,第一防水箱设置在第二防水箱顶部,第一防水箱顶部与无人艇主体底部固定连接,且位于两个平衡浮体之间,电源安装在第一防水箱内,转向电机安装在第二防水箱内,转动轴设置在第二防水箱内,且一端贯穿第二防水箱底部与第二防水箱转动连接,转向电机通过传动齿轮组驱动转动轴转动,防水罩设置在转动轴贯穿第二防水箱一端的端部,驱动电机安装在防水罩内,且输出轴贯穿防水罩与防水罩转动连接,驱动叶轮设置在驱动电机的输出轴上,且与驱动电机的输出轴固定连接,保护罩套设在驱动叶轮外侧,且通过连接杆与防水罩外侧固定连接。
11、优选的是,传动齿轮组包括啮合设置的主齿轮和副齿轮,主齿轮固定设置在转向电机的输出轴上,副齿轮设置在转动轴位于第二防水箱内一端,且与转动轴固定连接。
12、优选的是,防水罩顶部设有转向限位杆,第二防水箱底部设有与转向限位杆配合设置的弧形限位槽,转向限位杆上端位于弧形限位槽内,且可在弧形限位槽内滑动。
13、优选的是,局域网通信模块包括无线网桥,无线网桥用于使无人艇接入无线局域网进行组网通信和数据传输。
14、优选的是,海域视频信息采集模块包括高清网络摄像头和交换机,高清网络摄像头设置在无人艇主体顶部,交换机设置在无人艇主体内。
15、与现有技术相比,本实用新型的有益效果是:
16、本实用新型在使用时,需要多艘共同使用,在执行海域监测时,可通过局域网通信模块使多艘无人艇接入同一无线局域网进行组网通信和数据传输,形成多艘无人艇基于同一无线局域网的通信网络,该通信网络内的所有无人艇之间可实现信息相互传输,当遇到卫星通信及通信基站信号无法链接的情况,只要其中有一艘无人艇能够接收到通信基站的信号,即可将该通信网络内所有的无人艇采集的信息全部传输回通信基站,解决了现有的无人艇在使用时,遇到卫星通信及通信基站信号无法链接的情况,存在无法多艘无人艇互联,形成通信网络互相传递信息的问题。
技术特征:
1.一种自动组网海域监测无人艇,其特征在于,包括控制模块(1)、海域视频信息采集模块(2)、gps定位导航模块(3)、局域网通信模块(4)和艇体;
2.根据权利要求1所述的一种自动组网海域监测无人艇,其特征在于,无人艇主体(10)内设有安装腔体,控制模块(1)、海域视频信息采集模块(2)、gps定位导航模块(3)和局域网通信模块(4)设置在安装腔体内。
3.根据权利要求2所述的一种自动组网海域监测无人艇,其特征在于,浮体部(20)包括主浮体(200)和设置在主浮体(200)两侧的一对平衡浮体(201),主浮体(200)与平衡浮体(201)之间通过连接件(21)连接。
4.根据权利要求3所述的一种自动组网海域监测无人艇,其特征在于,平衡浮体(201)包括上浮体(202)和配重水箱(203),上浮体(202)设置在配重水箱(203)顶部,连接件(21)一端与配重水箱(203)固定连接,另一端与主浮体(200)固定连接。
5.根据权利要求4所述的一种自动组网海域监测无人艇,其特征在于,配重水箱(203)上设有水源口(204),水源口(204)处设有堵塞头(205),堵塞头(205)与水源口(204)螺纹连接。
6.根据权利要求2或4所述的一种自动组网海域监测无人艇,其特征在于,动力部(30)包括第一防水箱(300)、第二防水箱(301)、电源(302)、转向电机(303)、传动齿轮组(304)、转动轴(305)、防水罩(306)、驱动电机(307)、驱动叶轮(308)和保护罩(309),第一防水箱(300)设置在第二防水箱(301)顶部,第一防水箱(300)顶部与无人艇主体(10)底部固定连接,且位于两个平衡浮体(201)之间,电源(302)安装在第一防水箱(300)内,转向电机(303)安装在第二防水箱(301)内,转动轴(305)设置在第二防水箱(301)内,且一端贯穿第二防水箱(301)底部与第二防水箱(301)转动连接,转向电机(303)通过传动齿轮组(304)驱动转动轴(305)转动,防水罩(306)设置在转动轴(305)贯穿第二防水箱(301)一端的端部,驱动电机(307)安装在防水罩(306)内,且输出轴贯穿防水罩(306)与防水罩(306)转动连接,驱动叶轮(308)设置在驱动电机(307)的输出轴上,且与驱动电机(307)的输出轴固定连接,保护罩(309)套设在驱动叶轮(308)外侧,且通过连接杆(310)与防水罩(306)外侧固定连接。
7.根据权利要求6所述的一种自动组网海域监测无人艇,其特征在于,传动齿轮组(304)包括啮合设置的主齿轮(311)和副齿轮(312),主齿轮(311)固定设置在转向电机(303)的输出轴上,副齿轮(312)设置在转动轴(305)位于第二防水箱(301)内一端,且与转动轴(305)固定连接。
8.根据权利要求7所述的一种自动组网海域监测无人艇,其特征在于,防水罩(306)顶部设有转向限位杆(313),第二防水箱(301)底部设有与转向限位杆(313)配合设置的弧形限位槽(314),转向限位杆(313)上端位于弧形限位槽(314)内,且可在弧形限位槽(314)内滑动。
9.根据权利要求1所述的一种自动组网海域监测无人艇,其特征在于,局域网通信模块(4)包括无线网桥,无线网桥用于使无人艇接入无线局域网进行组网通信和数据传输。
10.根据权利要求1所述的一种自动组网海域监测无人艇,其特征在于,海域视频信息采集模块(2)包括高清网络摄像头(11)和交换机,高清网络摄像头(11)设置在无人艇主体(10)顶部,交换机设置在无人艇主体(10)内。
技术总结
本技术公开了一种自动组网海域监测无人艇,包括控制模块、海域视频信息采集模块、GPS定位导航模块、局域网通信模块和艇体;艇体包括无人艇主体、浮体部和动力部,无人艇主体设置在浮体部顶部,动力部设置在无人艇主体的底部,且与浮体部配合设置,浮体部用于使无人艇漂浮在海面上,动力部用于驱动无人艇移动;控制模块、海域视频信息采集模块、GPS定位导航模块和局域网通信模块设置在无人艇主体内,其中,局域网通信模块用于使无人艇接入无线局域网进行组网通信和数据传输,解决了现有的无人艇在使用时,遇到卫星通信及通信基站信号无法链接的情况,存在无法多艘无人艇互联,形成通信网络互相传递信息的问题。
技术研发人员:史正勇,孙俊辉,史晓李,陈益富,尹元庆
受保护的技术使用者:四川超马赫科技有限公司
技术研发日:20240205
技术公布日:2024/7/25
- 还没有人留言评论。精彩留言会获得点赞!