本技术涉及一种无人艇,尤其涉及一种用于数字孪生模型数据采集的自主巡航无人艇。
背景技术:
1、数字孪生航道快速构建技术研究的重点在于基于物联感知与全要素数字化表达、海量数据可视化渲染与数据融合供给、空间分析计算与模拟仿真推演等技术的研究,核心在于航道现实场景与孪生场景对的交互与协同,实现实时数据的传输与场景自学习构建,因此需要无人艇在待测水域多次航行或多辆无人艇航行进行数据的采集,通过无线网络传递到位于岸边的基站。
2、现有的自主巡航无人艇普遍采用单一的螺旋桨进行转向,在航行里程较长,水域情况复杂的水域内易发生侧翻,不能有效的完成水文数据完成数字孪生模型数据的采集。
技术实现思路
1、本实用新型提出了一种用于数字孪生模型数据采集的自主巡航无人艇,解决了现有的自主巡航无人艇在数字孪生模型数据采集中易发生侧翻等技术问题。
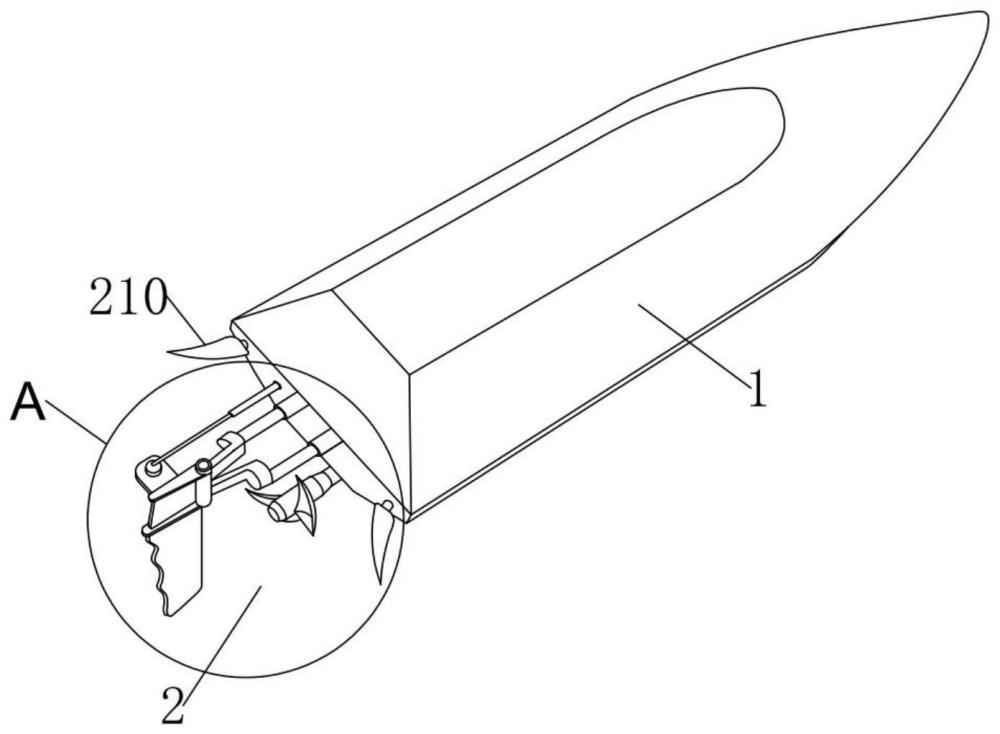
2、一种用于数字孪生模型数据采集的自主巡航无人艇,包括设置于艇身尾部的转向控制组件、设置于所述艇身内部且与所述转向控制组件连接的动力组件,以及设置于所述动力组件一侧的数据采集组件,所述转向控制组件包括设置于所述艇身尾部的尾板,所述尾板的外侧壁设置有两个限位柱,两个所述限位柱分别通过长度调节杆连接有人字形连接件,两个所述人字形连接件的交汇处通过转轴转动设置有转向翼,所述转向翼的一侧设置有凸板,所述凸板连接有第一拉杆,所述第一拉杆的另一端连接有第二拉杆,所述第二拉杆贯穿所述尾板延伸至所述艇身内部;
3、所述动力组件包括设置于所述艇身内部后端的第一电机,所述第一电机通过垂直传动杆连接有延伸至所述艇身外部的螺旋桨,所述第一电机的转轴处设置有第一轮盘,所述第一轮盘套设于所述第一电机的转动轴外与所述第一电机的机身同步转动,所述第一轮盘沿所述艇身尾部的方向啮合设置有第二轮盘,所述第二轮盘连接有第二电机,所述第二轮盘的上表面连接有所述第二拉杆;
4、所述数据采集组件包括设置于所述动力组件一侧的电源,所述电源的一侧设置有船载设备,所述船载设备的顶部延伸至所述艇身外部设置有无线网络,所述艇身的底部设置有声纳,所述电源分别与所述第一电机、所述第二电机、所述船载设备电性连接。
5、进一步地,两个所述限位柱和两个所述长度调节杆均通过螺纹连接,所述第一拉杆和所述第二拉杆通过螺纹连接。
6、进一步地,所述第二轮盘与所述第二拉杆的连接点位于所述第二轮盘的圆心沿所述艇身尾部的方向偏上45°。
7、进一步地,所述尾板的两侧分别铰接设置有防倾翼。
8、进一步地,所述艇身的周向设置有防撞条。
9、进一步地,所述船载设备通过所述无线网络连接位于岸边的基站。
10、本实用新型的有益效果为:
11、1.本实用新型采用转向控制组件和动力组件的设置,有利于无人艇在转向的过程中减少水流对艇身的影响,防止侧翻,具体的说,转向翼的凸板依次通过第一拉杆和第二拉杆连接第二轮盘,第二轮盘和第一轮盘的外表面为齿轮状且啮合转动,第一轮盘套设于第一电机的转动轴外与第一电机的机身同步转动,因此第二轮盘能够以第一轮盘圆心和第二轮盘圆心的连线为轴左右转动,从而带动第一轮盘左右转动,第二轮盘的上表面连接有第二拉杆,且第二轮盘与第二拉杆的连接点位于第二轮盘的圆心沿所述艇身尾部的方向偏上45°,第二轮盘顺时针转动带动第二拉杆向里收缩,转向翼随之转动;第二轮盘逆时针转动带动第二拉杆向外推动,转向翼向反方向转动;第二电机控制第二轮盘的转动,从而同步控制转向翼和第一电机机身的转动幅度,第一电机通过垂直转动杆控制螺旋桨的转动,因此实现转向翼和螺旋桨的同步转动,在无人艇转向的过程中,转向翼能够对水流进行导向,减少水流对艇身的影响。
12、2.本实用新型采用长度调节杆、第一拉杆和第二拉杆的结合设置,可以控制转向翼到尾板的距离,具体的说,第一拉杆和第二拉杆通过螺纹连接,限位柱和长度调节杆也通过螺纹连接,螺纹连接有利于调整转向翼到尾板的距离,转向翼到尾板的距离对于水流的导向能力不同,因此可根据无人艇行驶的速度调整距离,从而使转向翼对水流起到良好的导向作用,防止无人艇侧翻。
13、3.本实用新型采用数据采集组件的设置,包括船载设备和通过无线网络连接位于岸边的基站,ai s是目前现有的一种新型的集网络技术、现代通讯技术、计算机技术、电子信息显示技术为一体的数字助航系统和设备,配合gps将艇位、艇速、改变航向率及航向等无人艇数据由无线网络向基站传输,使工作人员及时掌握附近水域所有无人艇的信息,采取必要避让行动。
14、4.本实用新型采用防倾翼的设置,在尾板两侧呈八字分布,无人艇行驶的过程中,加大艇身的横向着力点,保持艇身直行更加稳定,防止侧翻。
技术特征:1.一种用于数字孪生模型数据采集的自主巡航无人艇,其特征在于:包括设置于艇身尾部的转向控制组件、设置于所述艇身内部且与所述转向控制组件连接的动力组件,以及设置于所述动力组件一侧的数据采集组件,所述转向控制组件包括设置于所述艇身尾部的尾板,所述尾板的外侧壁设置有两个限位柱,两个所述限位柱分别通过长度调节杆连接有人字形连接件,两个所述人字形连接件的交汇处通过转轴转动设置有转向翼,所述转向翼的一侧设置有凸板,所述凸板连接有第一拉杆,所述第一拉杆的另一端连接有第二拉杆,所述第二拉杆贯穿所述尾板延伸至所述艇身内部;
2.根据权利要求1所述的一种用于数字孪生模型数据采集的自主巡航无人艇,其特征在于:两个所述限位柱和两个所述长度调节杆均通过螺纹连接,所述第一拉杆和所述第二拉杆通过螺纹连接。
3.根据权利要求1所述的一种用于数字孪生模型数据采集的自主巡航无人艇,其特征在于:所述第二轮盘与所述第二拉杆的连接点位于所述第二轮盘的圆心沿所述艇身尾部的方向偏上45°。
4.根据权利要求1所述的一种用于数字孪生模型数据采集的自主巡航无人艇,其特征在于:所述尾板的两侧分别铰接设置有防倾翼。
5.根据权利要求1所述的一种用于数字孪生模型数据采集的自主巡航无人艇,其特征在于:所述艇身的周向设置有防撞条。
6.根据权利要求1所述的一种用于数字孪生模型数据采集的自主巡航无人艇,其特征在于:所述船载设备通过所述无线网络连接位于岸边的基站。
技术总结本技术涉及一种无人艇,尤其涉及一种用于数字孪生模型数据采集的自主巡航无人艇;本技术涉及一种样品架,尤其涉及一种激光加热样品架;包括设置于艇身尾部的转向控制组件、设置于所述艇身内部且与所述转向控制组件连接的动力组件,以及设置于所述动力组件一侧的数据采集组件;解决了现有的自主巡航无人艇在数字孪生模型数据采集中易发生侧翻等技术问题。
技术研发人员:毕金强
受保护的技术使用者:交通运输部天津水运工程科学研究所
技术研发日:20240409
技术公布日:2024/8/20