地空一体测绘巡检汽车机器人的制作方法
1.本发明涉及测绘、巡检技术领域,尤其是涉及一种广泛应用于智慧城市管理、智慧交通管理以及工业生产管理的地空一体测绘巡检汽车机器人。
背景技术:
2.基于巡检特种无人车的应用需求,安防行业是智慧城市布局的切入点。随着政府主导的智慧城市、智慧交通建设的需求不断增长,在“互联网+”、“智能制造”、“人工智能”等国家政策的支持下,未来智慧安防应用前景广阔。随着5g产业化的逐步深入,技术迭代的加快,促进警用机器人安防领域的蓬勃发展与警用巡检机器人应用的结合,进而带动公共安全行业的数字化、网络化、智能化发展,实现全国公安“立体防控”体系的完善及优化,降低公安干警工作强度,减少工作风险,解放警力,服务群众的目的。
3.基于地图采集特种无人车的应用需求,“超级繁琐”的绘制工作——派出配备传感器的汽车捕捉城市的周围环境,然后将那些3d图像转化成为数字景观。制作出高精度街道地图。这些地图最终可能会成为无人驾驶车辆的车载导航指南。国内高精地图市场刚刚兴起,智慧城市和航空等领域对其需求不断增加,自动驾驶汽车更是优选落地场景。随着行业的高速增长态势,预计地理大数据整体应用市场可超百亿规模。
4.现有的巡检机器人多应用的是slam局部导航技术和融合gps定位,使用的导航地图为2d或很少数据量的3d地图数据,其技术壁垒普遍存在使用区域面积小,定位精度差。目前车载无人机都是,车上直接安装个独立的无人机舱,无人机舱的控制其实和车端的关联性并不多。其控制端也和车没有实质性的关系。
5.因此,市场上迫切需要一种无人驾驶汽车机器人与无人机高度集成一体化的高科技智能设备。
技术实现要素:
6.本发明要解决的技术问题是提供一种地空一体测绘巡检汽车机器人,能够将无人机空飞测绘和汽车机器人地面行走测绘、巡检进行协同,高度结合应用。
7.为解决上述技术问题,本发明采用的技术方案是:该地空一体测绘巡检汽车机器人,包括有巡检车和无人机,所述巡检车设置有活动盖门,所述活动盖门与所述巡检车的车体骨架连接;所述活动盖门封闭后形成有容纳无人机的隐藏式无人机舱,所述无人机位于所述隐藏式无人机舱内;所述无人机往复飞行于待测绘空域与所述隐藏式无人机舱之间,所述巡检车行走于待巡检路径,所述无人机与所述巡检车进行双向通信信号传输。
8.在上述技术方案中,形成封闭的隐藏式无人机停机舱的活动盖门,在无人机停降于机舱内时,可控制活动盖门关闭,无人机要升空时,可控制活动盖门打开,隐藏式无人机舱避免了车体顶面的传感器视野干涉问题,且保证了整体巡检车的外观造型特征;地空一体测绘巡检汽车机器人对测绘、巡检环境进行采集数据、拍摄视频等资料数据,进行分析后即可采取相应的处置,填补了目前安保机器人只能进行地面巡检的缺陷和对突发情况的现
场数据和信息资源不足等问题,能够将无人机空飞测绘和汽车机器人(巡检车)地面行走测绘、巡检进行协同,高度结合应用。
9.优选的,在所述隐藏式无人机舱内设置有停机坪,所述停机坪通过电动叉臂升降机构与所述车体骨架连接固定;所述停机坪上还安装有无人机复位装置与无线充电装置;所述无人机的脚架与所述无人机复位装置通过夹具连接固定。
10.电动叉臂升降机构用于停机坪的升降,无人机要升空时或者在无人机返回停降于机舱内时,即上升;无人机复位装置用于无人机精准的停放在停机坪上,当无人机停落在停机坪上时,无人机复位装置自动复位无人机并夹具锁紧,实现了无人机的锁定,有效保护了无人机的安全,避免其受颠簸等因素导致无人机的损伤,并保证了无人机自动充电的精确位置。
11.优选的,所述电动叉臂升降机构包括成x型活动连接的第一叉臂和第二叉臂,由所述第一叉臂一端连接滑动块通过来回往复运动驱动所述停机坪进行升降动作,第一叉臂另一端与所述停机坪连接,相应的,所述第二叉臂一端固定在所述电动叉臂升降机构上,另一端与所述停机坪连接;无人机复位装置位于所述停机坪上。
12.优选的,所述巡检车设置有侧门,所述侧门通过弯臂铰链和锁止与所述车体骨架固定;所述弯臂铰链一端螺接固定在所述车体骨架上,另一端固定在所述侧门上;所述锁止与固定于所述车体骨架的锁止结构配合锁紧所述侧门。
13.侧门开启后非常方便在紧急事件中取用车体储物空间存放巡检紧急用品。
14.优选的,所述巡检车还具有车载喇叭口,所述车载喇叭口与所述巡检车的侧围是一体式;在所述巡检车上,还安装有led显示屏,在所述巡检车的前、后部各有一块led显示屏。
15.优选的,所述led显示屏通过安装支架固定在所述车体骨架上。
16.优选的,在所述巡检车上,3d激光雷达通过安装板与激光雷达底座螺接固定;惯导天线通过安装底座螺接固定在所述巡检车的车顶;所述巡检车还设置有整车环视影像装置,所述整车环视影像装置由位于所述巡检车前、后、左、右四个方向上各一个车载高清摄像头组成,所述车载高清摄像头通过摄像头安装支架与所述巡检车的外壳螺接固定。
17.优选的,在所述巡检车上,还安装有整车超声波模组,所述整车超声波模组共有12颗超声波雷达,所述巡检车的车头和车尾各安装四个,两侧各安装两个,均与所述巡检车的外壳是卡接固定。
18.优选的,所述巡检车还包括有模块化线控底盘和车体储物空间,所述车体储物空间用于存放巡检紧急用品;所述无人机上设置有带可旋转安装座的高清摄像头。
19.优选的,所述无人机复位装置包括有红外或者图像对准装置,所述隐藏式无人机舱内设置有对准标示,所述隐藏式无人机舱内设置可旋转的摄像头。
20.本发明的地空一体测绘巡检汽车机器人,是一个集成环境感知、动态决策、行为控制和报警的装置,具备自主感知、自主行走、自主保护、互动交流等能力,可帮助工作人员完成基础性、重复性、危险性的安保工作,区域地图数据更新。推动安保服务升级,降低安保运营成本,减少区域地图更新成本的多功能综合全新工业设计的智能装备;本发明的地空一体测绘巡检汽车机器人的车体采用模块化设计,上层为一体式车身包含隐藏式无人机舱,最下层为下车体模块,这样模块化设计可以节约设计成本和开发周期,可灵活的对无人地
空一体测绘巡检汽车机器人整体形状多重方案的开发,对称式造型设计可减少设计开发与制造成本;可以根据无人机的具体形状来更换复位装置的夹具载体上的夹具,大大增加了停机坪的适用与通用性。
附图说明
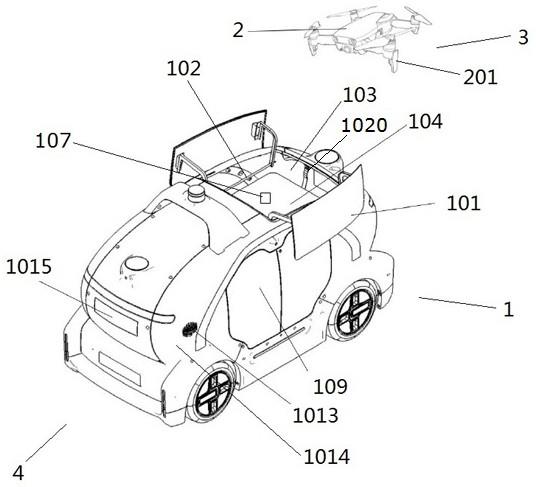
21.图1是本发明地空一体测绘巡检汽车机器人的总装结构图;图2是图1中的地空一体测绘巡检汽车机器人中无人机准备停降的状态示意图;图3是图1中的地空一体测绘巡检汽车机器人中无人机已经停靠好的状态示意图;图4是无人机的正面结构示意图;图5是本发明地空一体测绘巡检汽车机器人的操作流程图;图6是电动叉臂升降机构升起状态结构图;图7是电动叉臂升降机构停机状态结构图;图8是模块化线控底盘结构图;图9是模块化线控底盘配装后的结构图;图10是侧门局部结构图;图11是弯臂铰链与车体骨架局部连接结构图;其中:1
‑
巡检车; 101
‑
活动盖门,102
‑
车体骨架,103
‑
隐藏式无人机舱, 104
‑
停机坪,105
‑
电动叉臂升降机构,106
‑
无人机复位装置,107
‑
无线充电装置,108
‑
夹具,109
‑
侧门,1010
‑
弯臂铰链,1011
‑
锁止,1012
‑
锁止结构,1013
‑
车载喇叭口,1014
‑
侧围,1015
‑
led显示屏,1016
‑
安装支架,1017
‑
3d激光雷达,1018
‑
安装板,1019
‑
激光雷达底座,1020
‑
可旋转的摄像头,1021
‑
惯导天线,1022
‑
安装底座,1023
‑
车顶,1024
‑
整车环视影像装置,1025
‑
车载高清摄像头,1026
‑
摄像头安装支架,1027
‑
外壳,1028
‑
整车超声波模组,1029
‑
超声波雷达,1030
‑
车头,1031
‑
车尾,1032
‑
模块化线控底盘,1033
‑
车体储物空间,1034
‑
带可旋转安装座的高清摄像头,1035
‑
第一叉臂,1036
‑
第二叉臂,1037
‑
滑动块;2
‑
无人机,201
‑
脚架,202
‑
螺旋桨,203
‑
电机,204
‑
飞行器机头指示灯,205
‑
一体式云台相机;3
‑
待测绘空域;4
‑
待巡检路径。
具体实施方式
22.所附附图中以非限制性的举例形式,说明本发明的一个实施例,随后,在详细描述中较清楚的显示本发明的另外一些特性和优点。
23.如图1
‑
3所示,本实施例的地空一体测绘巡检汽车机器人,包括有巡检车1和无人机2,所述巡检车1设置有活动盖门101,活动盖门有两个,两个活动盖门101与所述巡检车1的车体骨架102连接;两个活动盖门101封闭后形成有容纳无人机2的隐藏式无人机舱103,所述无人机2位于所述隐藏式无人机舱103内;所述无人机2往复飞行于待测绘空域3与所述隐藏式无人机舱103之间,所述巡检车1行走于待巡检路径4,所述无人机2与所述巡检车1进行双向通信信号传输;相应的,无人机2也可以直接向平台传输数据以及接受平台的任务指令,巡检车1也可以直接向平台传输数据以及接受平台的任务指令。
24.如图2所示,在所述隐藏式无人机舱103内设置有停机坪104,所述停机坪104通过电动叉臂升降机构105与所述车体骨架102连接固定;所述停机坪104上还安装有无人机复
位装置106与无线充电装置107;所述无人机2的脚架201与所述无人机复位装置106通过夹具108连接固定;如图4所示,无人机2还具有螺旋桨202,螺旋桨202由电机203驱动,飞行器机头指示灯204安装在与脚架201(内含天线)连接的支架上,无人机2正面还设置有一体式云台相机205。
25.如图6、7所示,电动叉臂升降机构105包括成x型活动连接的第一叉臂1035和第二叉臂1036,由所述第一叉臂1035一端连接滑动块1037通过来回往复运动驱动所述停机坪104进行升降动作,第一叉臂1035另一端与所述停机坪104连接,相应的,所述第二叉臂1036一端固定在所述电动叉臂升降机构105上,另一端与所述停机坪104连接;无人机复位装置106位于所述停机坪104上。
26.巡检车设置有侧门109,如图1
‑
3、10所示,所述侧门109通过弯臂铰链1010和锁止1011与所述车体骨架102固定(如图11所示),侧门109上的弯臂铰链1010与主体骨架102螺接;所述弯臂铰链1010一端螺接固定在所述车体骨架102上,另一端固定在所述侧门109上;所述锁止1011与固定于所述车体骨架102的锁止结构1012配合锁紧所述侧门109。
27.所述巡检车1还具有车载喇叭口1013,所述车载喇叭口1013与所述巡检车1的侧围1014是一体式;在所述巡检车1上,还安装有led显示屏1015,在所述巡检车1的前、后部各有一块led显示屏,led显示屏1015通过安装支架1016固定在所述车体骨架102上。
28.在所述巡检车1上,3d激光雷达1017通过安装板1018与激光雷达底座1019螺接固定;惯导天线1021通过安装底座1022螺接固定在所述巡检车1的车顶1023;所述巡检车1还设置有整车环视影像装置1024,所述整车环视影像装置1024由位于所述巡检车1前、后、左、右四个方向上各一个车载高清摄像头1025组成,所述车载高清摄像头1025通过摄像头安装支架1026与所述巡检车1的外壳1027螺接固定。
29.在所述巡检车1上,还安装有整车超声波模组1028,所述整车超声波模组1028共有12颗超声波雷达1029,所述巡检车1的车头1030和车尾1031各安装四个,两侧各安装两个,均与所述巡检车1的外壳1027是卡接固定。
30.所述巡检车1还包括有模块化线控底盘1032和车体储物空间1033,如图8、9所示,所述车体储物空间1033用于存放巡检紧急用品;所述无人机2上设置有带可旋转安装座的高清摄像头1034;所述无人机复位装置106包括有红外或者图像对准装置(属于现有技术),所述隐藏式无人机舱103内设置有对准标示(属于常规现有技术),所述隐藏式无人机舱103内设置可旋转的摄像头1020,如图2、3所示。
31.如图5所示,是本实施例的地空一体测绘巡检汽车机器人操作流程图,平台规划任务
→
规划任务同时下发给巡检车1和无人机2
→
巡检车1按照规划路线进行巡检采图
→
地面巡检
→
到达指定坐标起飞点,巡检车1停车
→
控制活动盖门101打开
→
无人机2进行空中巡检
→
地空一体化巡检
→
环境数据采集
→
数据发送至平台,平台根据采集到的数据进行大数据分析。
32.还可以这样的操作流程:平台规划任务
→
规划任务同时下发给巡检车1和无人机2
→
巡检车1按照规划路线进行巡检采图
→
巡检车1进行地面巡检;在前述“规划任务同时下发给巡检车1和无人机2”同时,进行平台一体化控制
→
控制活动盖门101打开
→
无人机2进行空中巡检
→
地空一体化巡检
→
环境数据采集,数据发送至平台,平台根据采集到的数据进行大数据分析。
33.上面结合附图对本发明的实施方式作了详细的说明,但是本发明不限于上述实施方式,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1