无人机动力系统远距离测定装置
1.本实用新型涉及无人机动力系统的装置技术领域,特别涉及一种利用杠杆原理的远距离实时无人机动力测量装置。
背景技术:
2.目前,随着控制、通信、导航、材料等相关技术和军事科技的民用化发展,无人机行业发展迅速,无人机的动力系统一般由直流无刷电机、螺旋桨及电子调速器等组成,其参数对无人机的飞行时间、载重、飞行姿态控制等重要指标具有重要影响,因此,提高动力系统参数的测量精度并控制误差成为无人机设计工作的重要环节。但当前市场上,无人机动力系统精确测量装置较少,现有的测试装置存在测试参数不全、近距离测试较为危险等问题。
技术实现要素:
3.本实用新型的目的在于提供一种远距离实时无人机动力测量装置,以解决背景技术中存在的问题。
4.本实用新型的目的在于设计出能够配置无人机电机、螺旋桨动力系统的测定装置,并通过蓝牙远距离传输数据信息。
5.本实用新型提供了一种无人机动力系统远距离测定装置,包括:底座;支座;传力杆,包括动力传力杆、测量传力杆,动力传力杆一端为动力端,另一端为杠杆支点,测量传力杆一端为测量端,另一端与动力传力杆相连;卡扣,连接动力传力杆与测量传力杆;电机座,固定电机与螺旋桨;转速测量伸缩杆,固定光电传感器;压力数据采集装置;数据传输模块;限位框。
6.根据本实用新型,电机所在的动力端产生的拉力与电机位置到支座中心的距离的乘积等于测量端阻力与压力数据采集装置到支座中心的距离的乘积。
7.根据本实用新型,动力传力杆含有多种限位孔,可改变电机座位置,从而改变动力臂大小。
8.根据本实用新型,电机座孔含有多种组合方式,从而配置不同的电机。
9.根据本实用新型,支座处设计有轴承座,通过轴承与轴将动力传力杆安装到支座上,支点为轴承孔中心。
10.根据本实用新型,动力传力杆与测量传力杆通过卡扣连接,方便拆卸。
11.根据本实用新型,测量传力杆测量端与压力数据采集装置接触。
12.根据本实用新型,限位框顶部略高于测量传力杆。
13.根据本实用新型,转速测量伸缩杆头部安装转速测量元件,尾部固定在底座上,通过固定螺栓调节伸缩量。
14.根据本实用新型,转速测量元件为光电传感器。
15.根据本实用新型,底座底部装有固定板,其上开有螺栓孔,通过地脚螺栓固定装置。
16.根据本实用新型,数据传输模块为蓝牙模块。
17.该产品的有益效果为,本实用新型实现了无人机动力系统测量模块与数据观测接收模块的分离,保障测量实验人员的安全,测量信息,如动力系统的升力、转速、电流、电压等通过蓝牙模块传输,使无人机动力系统的测定不受距离的约束,有利于实验测试阶段的开展。无人机动力系统测力臂的折叠收放装置优化了存储、运输空间。
附图说明
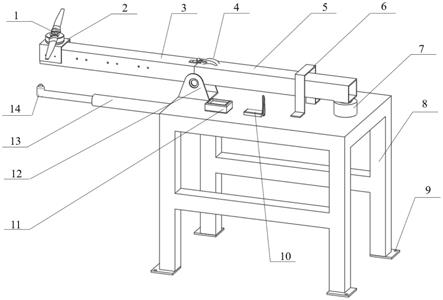
18.图1是本实用新型整体轴测图;
19.其中:1-被测螺旋桨电机、2-电机座、3-动力传力杆、4-卡扣、5-测量传力杆、6-限位框、7-压力数据采集装置、8-底座、9-底座固定板、10-蓝牙传输模块、11-电压电流功率数据采集装置、12-支座、13-转速测量伸缩杆、14-光电传感器。
20.图2是本实用新型动力传力杆3及测量传力杆5折叠轴测图;
21.图3是本实用新型整体正视图;
22.图4是本实用新型整体俯视图;
23.图5是本实用新型整体侧视图。
具体实施方式
24.下面结合附图和具体实施方式对本发明进一步说明:
25.参考图1和图2,本实用新型作为无人机动力系统远距离测定装置,包括:1-被测螺旋桨电机、2-电机座、3-动力传力杆、4-卡扣、5-测量传力杆、6-限位框、7-压力数据采集装置、8-底座、9-底座固定板、10-蓝牙传输模块、11-电压电流功率数据采集装置、12-支座、13-转速测量伸缩杆、14-光电传感器;
26.参照图1,被测电机螺旋桨1采用螺栓固定在电机座2上,电机座2通过限位孔连接在动力传力杆上3;将卡扣4锁定,动力传力杆3与测量传力杆5连接为整体,与支座12通过轴承连接,形成测量装置主体。
27.参照图1,限位框6焊接或通过螺栓与底座8相连,防止测量传力杆5翻转引发危险事故;压力数据采集装置7置于测量传力杆5下方采集传输压力数据。
28.参照图1,光电传感器14连接在转速测量伸缩杆13端部采集传输转速数据,转速测量伸缩杆13通过内置螺纹与底座8连接,转速测量伸缩杆13为可伸缩设计以此来适应不同型号的螺旋桨。
29.参照图1,蓝牙传输模块10将压力数据采集装置7、电压电流功率数据采集装置11及光电传感器14所采集的数据传输到电脑、手机等移动端,测量人员可通过移动端对数据进行实时分析,使数据可视化,降低测量实验的危险性。
30.参照图1,通过螺栓或地钉将底座固定板9与地面相连,防止受力不稳引发安全事故。
31.参照图2,将动力传力杆3及测量传力杆5从支座8上取下,并将卡扣4打开,动力传力杆3及测量传力杆5折叠,使装置更加便携。
32.应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
技术特征:
1.一种无人机动力系统远距离测定装置,其特征在于,包括:被测螺旋桨电机(1)、电机座(2)、动力传力杆(3)、卡扣(4)、测量传力杆(5)、限位框(6)、压力数据采集装置(7)、底座(8)、底座固定板(9)、蓝牙传输模块(10)、电压电流功率数据采集装置(11)、支座(12)、转速测量伸缩杆(13)、光电传感器(14);动力传力杆(3)一端为动力端,另一端为杠杆支点,测量传力杆(5)一端为测量端,另一端通过卡扣(4)与动力传力杆(3)相连;电机(1)所在的动力端产生的拉力与电机位置到支座中心的距离的乘积等于测量端阻力与测量元件到支座(12)中心的距离的乘积。2.根据权利要求1所述的无人机动力系统远距离测定装置,其特征在于,动力传力杆(3)含有多种限位孔,可改变电机座(2)位置,从而改变动力臂大小。3.根据权利要求1所述的无人机动力系统远距离测定装置,其特征在于,电机座(2)孔含有多种组合方式,从而配置不同的电机。4.根据权利要求1所述的无人机动力系统远距离测定装置,其特征在于,支座(12)处设计有轴承座,通过轴承与轴将动力传力杆(3)安装到支座(12)上,支点为轴承孔中心。5.根据权利要求1所述的无人机动力系统远距离测定装置,其特征在于,动力传力杆(3)与测量传力杆(5)通过卡扣(4)连接,方便拆卸。6.根据权利要求1所述的无人机动力系统远距离测定装置,其特征在于,测量传力杆(5)测量端与压力数据采集装置(7)接触,限位框(6)顶部略高于测量传力杆(5)。7.根据权利要求1所述的无人机动力系统远距离测定装置,其特征在于,转速测量伸缩杆(13)头部安装转速测量元件,尾部固定在底座(8)上,通过固定螺栓调节伸缩量。8.根据权利要求1所述的无人机动力系统远距离测定装置,其特征在于,转速测量元件为光电传感器(14)。9.根据权利要求1所述的无人机动力系统远距离测定装置,其特征在于,底座(8)底部装有底座固定板(9),其上开有螺栓孔,通过地脚螺栓固定装置。10.根据权利要求1所述的无人机动力系统远距离测定装置,其特征在于,数据传输模块为蓝牙传输模块(10)。
技术总结
本实用新型公开了一种无人机动力系统远距离测定装置,包括:底座;支座;传力杆;卡扣;电机座;转速测量伸缩杆;压力数据采集装置;数据传输模块;限位框。底座用于承载测力结构,传力杆用于传导拉力,进而被压力数据采集装置采集,数据传输模块采用蓝牙模块,与手机或电脑等设备连接,保持一定安全距离的同时进行数据传递。本实用新型目的在于提供一种基于杠杆原理的无人机动力系统远距离测定装置,能够实现无人机动力系统测量模块与数据观测接收模块的分离,保障测量实验人员的安全,测量信息通过蓝牙模块传输,使无人机动力系统的测定不受距离的约束,有利于实验测试阶段的开展。无人机动力系统测力臂的折叠收放装置优化了存储、运输空间。运输空间。运输空间。
技术研发人员:王广巍 万泱泱 崔爱雅
受保护的技术使用者:北京理工大学
技术研发日:2021.04.20
技术公布日:2022/2/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1