用于能够悬停的飞行器的指示器和用于辅助执行所述飞行器的操作的方法与流程
本发明涉及一种用于能够悬停的飞行器的指示器。特别地,本发明涉及一种用于直升机、倾转旋翼飞行器或旋翼飞行器(helicoplane)。本发明还涉及一种用于辅助执行能够悬停的所述飞行器的操作的方法。
背景技术:
1、众所周知,直升机包括马达系统、由马达系统驱动且适于提供维持直升机所需的升力以及直升机的方向控制所需的推力的主旋翼。
2、众所周知,倾转旋翼飞行器包括:
3、-沿着第一纵向轴线延伸的机身;
4、-沿着倾转旋翼飞行器的第二横向轴线延伸且相对于第一纵向轴线倾斜的固定翼;以及
5、可围绕相应的第三轴线旋转并且可相对于第二轴线倾转的一对旋翼。
6、倾转旋翼飞行器可在以下构造之间切换:
7、-飞机构造,旋翼的相应的第三轴线平行于第一轴线;以及
8、-直升机构造,旋翼的相应的第三旋转轴线相对于第一轴线倾斜。
9、在飞机构造中,旋翼表现为传统的飞机螺旋桨并且产生维持飞机自身所需的推力。在这种构造中,维持飞机所需的升力由固定翼提供。
10、在直升机构造中,旋翼既提供维持其所需的升力也提供沿着所述第一轴线和第二轴线操作倾转旋翼飞行器所需的推力。
11、针对直升机和设置为直升机构造的倾转旋翼飞行器,众所周知,旋翼的驱动导致通过旋翼产生垂直气流。
12、在常规操作情况中,旋翼的驱动产生升力,导致通过旋翼自身产生从顶部向下的垂直气流。
13、该气流的一部分在桨叶的自由端附近重新向上循环与从顶部向下的垂直气流汇合。
14、更确切来说,气流的这个部分产生端部涡流,其产生气动阻力并且降低桨叶的气动效率。更详细来说,在每片桨叶的端部处形成涡流,其实际上被称为具有环形形状的端部涡流。
15、只要这种端部涡流保持在特定尺寸以下,旋翼的总体效率损失就保持较小。
16、然而,当直升机/设置为直升机构造的倾转旋翼飞行器处于下降情况时,飞行器跨过所述下行流,导致端部涡流尺寸增大。
17、这导致被称为“涡环状态”的情况,其中旋翼动力仅用于供应围绕旋翼的环形空气环流。
18、在下降率超过阈值时,前述现象加剧并且在旋翼的相关区域上产生湍流。因此,即使马达系统持续向旋翼提供动力,也极大地降低了旋翼的气动效率。
19、在这种情况下,直升机/倾转旋翼飞行器变得不稳定并且经受很强的振荡,例如俯仰和/或滚转振荡。
20、涡环状态情况在直升机/设置为直升机构造的倾转旋翼飞行器的下降率大于飞机典型的第一阈值的情况下产生,仅使用马达动力的一小部分并且平移前进速度小于第二阈值。
21、通常可能产生涡环状态情况的操作是没有精确高度控制的高空悬停操作以及具有极高下降率的降落操作。
22、专利申请ep-a-1620311公开了一种用于确认涡环状态情况并且自动克服这种情况的方法。
23、专利申请us-b-9,037,316、ep-b-2212296、ep-b-3263452和ep-3406562公开了用于确认涡环状态情况并且向机组人员通知该情况的方法。
24、在本领域中意识到简明且即刻清楚地向机组人员通知飞行器接近涡环状态情况或处于所述情况的需求。
25、us-a-2016/288922公开了一种根据权利要求1的能够悬停的飞行器和一种根据权利要求3的用于辅助执行飞行器的操作的方法。
26、cn-a-110901897公开了一种用于无人直升机的涡环状态的提前预警分离控制方法,其确实地实现了涡环提前预警和提前保护功能,提供了一种即使在已进入涡环状态时也能够快速且合理地分离的方案,并且确保了无人直升机的飞行安全性。根据该用于无人直升机的涡环状态的提前预警分离控制方法,可实时判断无人直升机的当前安全状态,将状态信息发送给控制端来提醒操作者进行提前预警,同时,该提前预警分离控制方法是稳定、可靠的并且提前预警精度高,极大地提高了无人直升机的飞行安全性。
27、ep-a-3477261公开了被构造为基于可用扭矩余量和雷达高度计高度来自动调节空速指示器上的低空速警告带的飞行仪表警告。
技术实现思路
1、本发明的目的是实现允许以简单且经济的方式满足至少一种上述需求的一种能够悬停的飞行器。
2、根据本发明,该目的通过根据权利要求1所述的能够悬停的飞行器来实现。
3、本发明还涉及根据权利要求3所述的用于辅助执行被构造为能够悬停的飞行器的操作的方法。
技术特征:
1.一种能够悬停的飞行器,其包括:
2.根据权利要求1所述的飞行器,其特征在于,所述控制单元(30)被构造为也基于所述飞行参数来命令在所述指示器(16a)上显示所述第三指示(103)。
3.一种用于辅助执行飞行器(1)的操作的方法,所述飞行器(1)为根据权利要求1或2所述的被构造为能够悬停的飞行器,其包括以下步骤:
4.根据权利要求3所述的方法,其特征在于,其包括步骤xii):在所述指示器(16a)上显示所述第二指示(101)和所述第三指示(103)。
技术总结
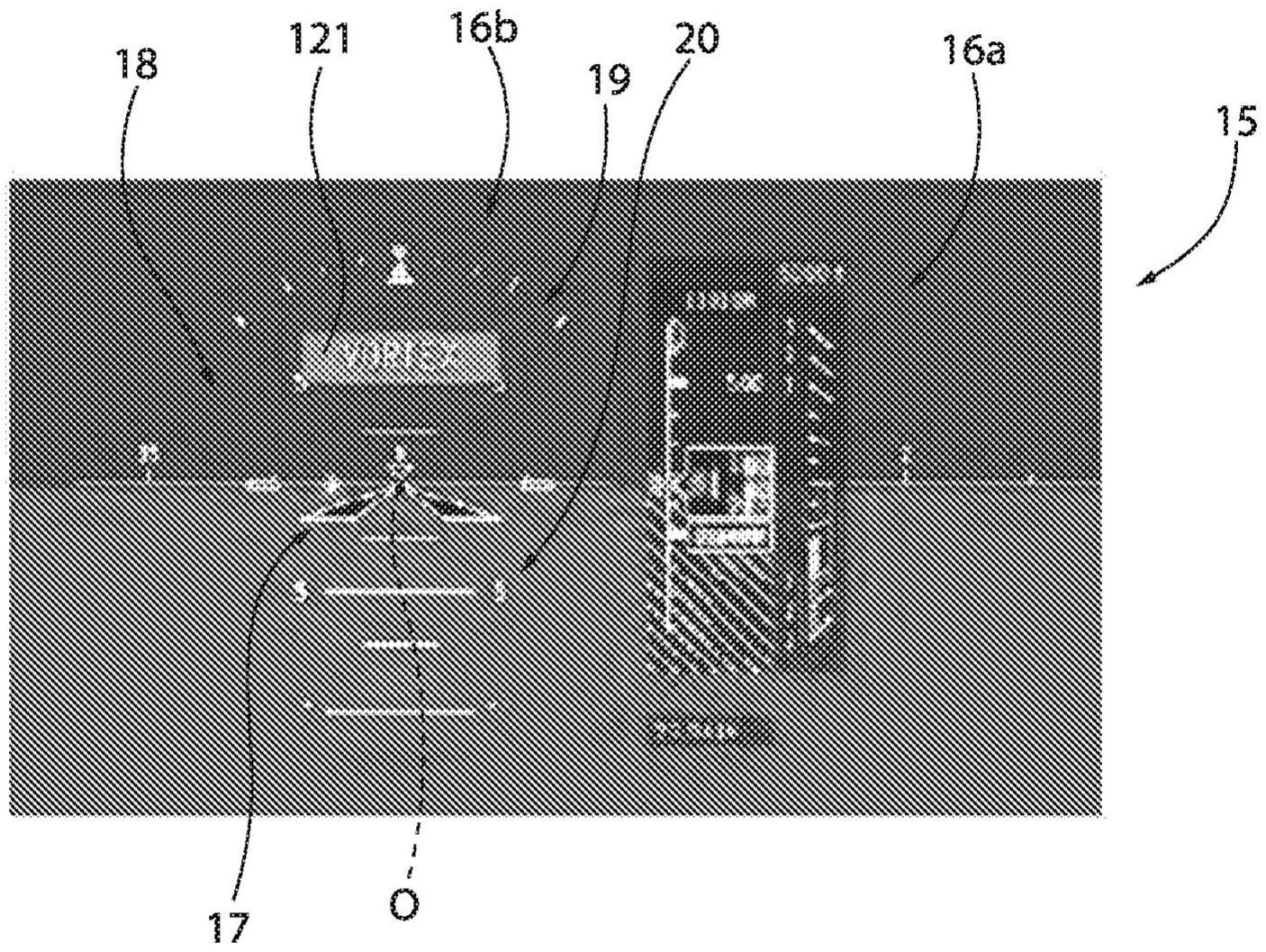
本发明公开了一种用于能够悬停的飞行器(1)的指示器(16a),其包括与飞行器(1)自身的垂直速度值关联的第一指示(35);指示器(16a)包括第一区域(100),其中可显示与达到涡环状态情况关联的第二指示(102)。
技术研发人员:温琴佐·陶马图尔戈,皮埃尔·阿卜杜勒·努尔,伊西多罗·皮科利尼,克莱门特·布雷纳,西莫内·戈比,詹弗兰科·奇托
受保护的技术使用者:列奥纳多股份公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!