卫星制导突防飞行器及其上的时间约束制导控制方法
本发明涉及飞行器指导控制,具体涉及一种卫星制导突防飞行器及其上的时间约束制导控制方法。
背景技术:
1、现如今,先进的反导系统及近程武器防御系统增大了单飞行器的突防难度,降低了突防概率,大大降级了作战效能。饱和攻击这一概念能够有效解决这一问题,提高飞行器的突防概率。所述饱和攻击是指多枚飞行器由不同的位置发射,对目标进行全向攻击,并最终在同一时刻打击目标。
2、另外,在一些特殊环境下,还需要多个飞行器按照预设的时间间隔依次命中目标,所以飞行器的实际飞行时间在实际应用过程中具有极其重要的作用,
3、为了实现对飞行器的飞行时间进行约束,使得多个飞行器在同一时间或者按照预定时间命中目标,需要对飞行器进行特殊控制,目前这一类的飞行器造价高昂,难以大批量列装,并且操作难度大的缺点也制约着大批量列装的进程。
4、基于此,本发明人基于采用卫星制导的近程突防飞行器为研究对象,设计了一种新型飞行器及其上的制导算法,通过在发射前装订飞行器的预设飞时,实现在多枚飞行器不同的初始条件下,有效控制飞行器在预设时间后同时命中目标或者按照预定时间间隔来依次命中目标。
技术实现思路
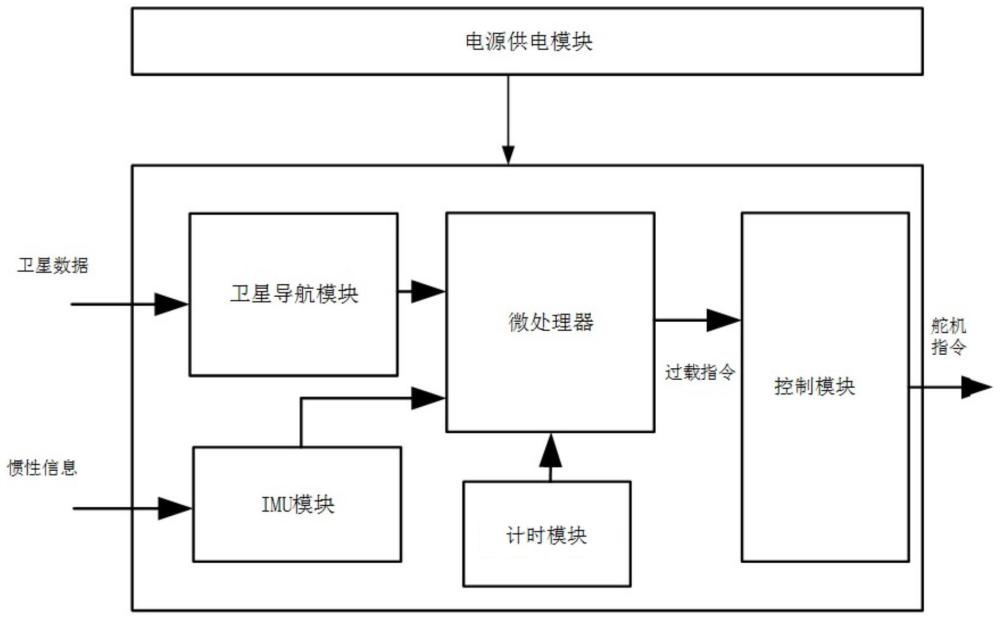
1、为了克服上述问题,本发明人进行了锐意研究,设计出一种卫星制导突防飞行器及其上的时间约束制导控制方法,该系统中设置有卫星导航模块,其用于实时获得飞行器的位置信息、速度信息,imu模块,其用于实时获得飞行器的姿态信息和加速度信息,计时模块,其实时记录飞行器在起飞后的飞行过程中已经经过的时间,微处理器,其用于根据接收到的信息获得制导指令;控制模块,其用于根据制导指令生成舵指令,进而控制伺服舵机偏转;其中,在所述微处理器中,基于期望飞时和飞行时间误差进行制导控制,获得需用过载,从而使得每个飞行器都能够按照预设时间命中目标,从而完成本发明。
2、具体来说,本发明的目的在于提供以一种卫星制导突防飞行器,其特征在于,该飞行器包括
3、卫星导航模块,其用于实时获得飞行器的位置信息、速度信息,并将其传递给微处理器;
4、imu模块,其用于实时获得飞行器的姿态信息和加速度信息,并将其传递给微处理器;
5、计时模块,其实时记录飞行器在起飞后的飞行过程中已经经过的时间,并将该时间传递给微处理器;
6、微处理器,其用于根据接收到的信息获得制导指令;和
7、控制模块,其用于根据制导指令生成舵指令,进而控制伺服舵机偏转。
8、其中,在所述微处理器中,基于期望飞时和飞行时间误差进行制导控制,获得需用过载。
9、其中,在所述微处理器中通过下式(一)实时获得需用过载:
10、
11、其中,am表示飞行器的需用过载;
12、其ns表示制导律的时变导航比;
13、vm表示飞行器的速度;
14、表示飞行器的弹目视线角速度。
15、其中,所述制导律的时变导航比ns通过下式(二)获得:
16、
17、其中,nc表示导航比;
18、其α1、β1、k1、p1和q1都表示设计参数;
19、其s表示飞行时间误差;
20、优选地,所述飞行时间误差s通过下式(三)获得:
21、s=t+tgo-tfd (三)
22、其中,t表示飞行器在起飞后的飞行过程中已经经过的时间;
23、其tgo表示飞行器的剩余飞行时间;
24、其tfd表示期望飞时。
25、其中,所述飞行器的剩余飞行时间tgo通过下式(四)获得:
26、
27、其中,r表示弹目相对距离;
28、φ表示飞行器的前置角。
29、本发明还提供一种卫星制导突防飞行器上的时间约束制导控制方法,该方法包括如下步骤:
30、通过卫星导航模块实时获得飞行器的位置信息、速度信息,并将其传递给微处理器;
31、通过imu模块实时获得飞行器的姿态信息和加速度信息,并将其传递给微处理器;
32、通过计时模块实时记录飞行器在起飞后的飞行过程中已经经过的时间,并将该时间传递给微处理器;
33、通过微处理器接收到信息,并根据接收到的信息获得制导指令;
34、通过控制模块根据制导指令生成舵指令,进而控制伺服舵机偏转。
35、其中,在所述微处理器中,基于期望飞时和飞行时间误差进行制导控制,获得需用过载。
36、其中,在所述微处理器中通过下式(一)实时获得需用过载:
37、
38、其中,am表示飞行器的需用过载;
39、ns表示制导律的时变导航比;
40、vm表示飞行器的速度;
41、表示飞行器的弹目视线角速度。
42、其中,所述制导律的时变导航比ns通过下式(二)获得:
43、
44、其中,nc表示导航比;
45、α1、β1、k1、p1和q1都表示设计参数;
46、其s表示飞行时间误差;
47、优选地,所述飞行时间误差s通过下式(三)获得:
48、s=t+tgo-tfd (三)
49、其中,t表示飞行器在起飞后的飞行过程中已经经过的时间;
50、tgo表示飞行器的剩余飞行时间;
51、tfd表示期望飞时。
52、本发明所具有的有益效果包括:
53、(1)根据本发明提供的卫星制导突防飞行器及其上的时间约束制导控制方法通过设置合理的制导指令获得方案,通过基于期望飞时和飞行时间误差进行制导控制,从而使得飞行器在遭遇各种意外气流的情况下,仍然能够按照预设时间到达目标位置。
54、(2)根据本发明提供的卫星制导突防飞行器及其上的时间约束制导控制方法对于传统卫星制导突防飞行器的改动较小,生产成本低,设计、生产都极为方便,便于大批量生产,应用价值极高。
技术特征:
1.一种卫星制导突防飞行器,其特征在于,该飞行器包括
2.根据权利要求1所述的卫星制导突防飞行器,其特征在于,
3.根据权利要求2所述的卫星制导突防飞行器,其特征在于,
4.根据权利要求3所述的卫星制导突防飞行器,其特征在于,
5.根据权利要求4所述的卫星制导突防飞行器,其特征在于,
6.一种卫星制导突防飞行器上的时间约束制导控制方法,其特征在于,该方法包括如下步骤:
7.根据权利要求6所述的卫星制导突防飞行器上的时间约束制导控制方法,其特征在于,
8.根据权利要求7所述的卫星制导突防飞行器上的时间约束制导控制方法,其特征在于,
9.根据权利要求8所述的卫星制导突防飞行器上的时间约束制导控制方法,其特征在于,
10.根据权利要求9所述的卫星制导突防飞行器上的时间约束制导控制方法,其特征在于,
技术总结
本发明公开了一种卫星制导突防飞行器及其上的时间约束制导控制方法,该系统中设置有卫星导航模块,其用于实时获得飞行器的位置信息、速度信息,IMU模块,其用于实时获得飞行器的姿态信息和加速度信息,计时模块,其实时记录飞行器在起飞后的飞行过程中已经经过的时间,微处理器,其用于根据接收到的信息获得制导指令;控制模块,其用于根据制导指令生成舵指令,进而控制伺服舵机偏转;其中,在所述微处理器中,基于期望飞时和飞行时间误差进行制导控制,获得需用过载,从而使得每个飞行器都能够按照预设时间命中目标。
技术研发人员:王伟,王雨辰,程一琛,刘佳琪,陈柏霖,朱泽军,张宏岩,于之晨,杨婧,张锦程,张广
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!