一种并联机械手火星车
1.本发明涉及机器人机械手领域,尤其是涉及航天探测设备机械手领域,具体涉及一种并联机械手火星车。
背景技术:
2.在行星表面探测作业时,机械臂作为操作科学仪器的一种有效载体,被国外众多机构研究,并广泛应用于星球探测作业中,完成操纵有效载荷如光谱仪、显微成像仪、铲子等,从而辅助完成定位、探测、采样、抓取、搬运等作业任务。美国、日本、俄罗斯、欧空局等国家和机构都在不同时期采用漫游车搭载机械臂进行行星表面的探测。根据不同的科学探测目标和任务要求, 漫游车搭载的机械臂的自由度也有所不同, 通常为2~7个自由度不等。2004年2月13日,国防科工委正式宣布我国启动“嫦娥”月球探测工程,国内一些单位先后启动了月球车样机的研制工作,包括月球车机械臂系统的研制。从目前国内外车载机械臂的研究现状来看,车载机械臂技术在空间应用方面具有广阔的前景。
3.采用机械臂携带一定的有效载荷来完成火星等行星表面科学目标的探测是国内外研究和应用的热点。针对火星车车载机械臂设计的约束条件主要来自三方面:一是火星环境, 二是火星车结构, 三是作业任务。现有技术中火星车的机械手由多节手臂串联组成,每节手臂均由电机控制,导致机械手臂整体笨重,动作反应慢且定位不准确,而且结构复杂。开发和设计一套适合空间环境的、轻质重载的车载机械臂作业系统是一个设计难点,如何根据作业任务目标,设计出轻小紧凑、灵活的机械臂也很具有挑战性。
技术实现要素:
4.本发明要解决的技术问题是提供一种并联机械手火星车,结构紧凑、整体质量轻且操作灵活。
5.本发明是通过以下技术方案实现的:一种并联机械手火星车,包括移动车体,所述移动车体上设有升降装置,所述升降装置的顶部设有机械手底座;所述机械手底座的顶部转动安装有两个左右分布的主动臂,每个主动臂的后端由主驱动机构带动旋转;两个主动臂的前端均转动连接有从动臂,两个从动臂的前端互相铰接形成机械手末端,所述机械手末端的底部转动连接有z向伸缩臂,所述z向伸缩臂由z向旋转驱动机构带动旋转;所述z向伸缩臂的下端设有机械爪手。
6.进一步的,两个主驱动机构均设置在所述机械手底座内部,每个主驱动机构均包括第一步进电机、第一小带轮、第一中间带轮和第一大带轮,所述第一中间带轮和第一大带轮均通过轴承组件转动连接在所述机械手底座上,所述第一步进电机的输出轴连接所述第一小带轮,所述第一小带轮通过同步带传动连接第一中间带轮,所述第一中间带轮通过同
步带传动连接所述第一大带轮,所述第一大带轮的顶部设有固定所述主动臂后端的转动台。
7.进一步的,所述机械手末端的底部转动连接有腕部连接盘,所述z向伸缩臂为多节伸缩气缸,所述z向旋转驱动机构设置在一个从动臂内,z向旋转驱动机构包括第二步进电机、第二小带轮、第二中间带轮和第二大带轮,所述第二中间带轮和第二大带轮均通过轴承组件转动连接在所述从动臂内;所述第二步进电机固定在从动臂后端位置、其输出轴连接所述第二小带轮,所述第二小带轮通过同步带传动连接第二中间带轮,所述第二中间带轮通过同步带传动连接所述第二大带轮,所述第二大带轮的底部与所述腕部连接盘固定连接。
8.进一步的,所述升降装置包括第三步进电机、第三小带轮、第三大带轮、底部滑槽、双向螺杆和剪叉杆件;所述第三步进电机和底部滑槽设置在所述移动车体上,所述双向螺杆的左右两端转动连接在所述底部滑槽的左右两端上,所述第三大带轮固定在所述双向螺杆的端部,所述第三步进电机的输出轴连接所述第三小带轮,所述第三小带轮通过同步带连接所述第三大带轮;所述双向螺杆的两段反向螺纹上分别连接有配合在所述底部滑槽内的螺杆滑块,所述剪叉杆件是由两根升降板交叉分布组成,所述剪叉杆件的两底端分别对应铰接在两个螺杆滑块上;所述机械手底座的底部设有顶部滑槽,所述剪叉杆件的两底端分别通过滑动块滑动连接在所述顶部滑槽内。
9.进一步的,所述机械爪手包括爪手外壳、舵机、舵盘和两个侧滑块,所述舵机安装在所述爪手外壳的前侧壁上,所述舵盘位于所述爪手外壳内并与所述舵盘的输出轴连接;所述爪手外壳的上、下两端分别设有左右横向分布的滑杆,两个侧滑块分别滑动连接在滑杆的左右两端,每个侧滑块的底部设有指尖;所述舵盘的左右两侧分别铰接有连接杆,所述连接杆的另一端铰接在同侧的侧滑块内壁上。
10.进一步的,所述z向伸缩臂的底部固定有多孔圆盘,所述多孔圆盘通过螺栓固定所述爪手外壳顶部连接板上。
11.进一步的,所述主动臂和从动臂均为长形中空结构。
12.本发明与现有技术相比所取得的有益效果如下:1、机械手底座的顶部转动安装有两个左右分布的主动臂,两个主动臂的前端均转动连接有从动臂,两个从动臂的前端互相铰接形成机械手末端,机械手末端的底部转动连接有z向伸缩臂;本发明的机械手有四个自由度,可以实现平面上沿着三个坐标轴方向上的平动和绕着一个坐标轴的转动。两个主驱动机构均设置在移动车体上,主动臂、从动臂采用并联方式,从而极大地增加了机械臂的精度,与传统的scara机器人相比,本发明总体上减少了机械手末端运动部分的重量,减少了整个机械臂对回转轴的转动惯量,使得机器人有更高的运动速度和定位精度;本发明的机械手整体结构紧凑、质量轻且操作灵活、定位精度高;2、升降装置包括第三步进电机、第三小带轮、第三大带轮、底部滑槽、双向螺杆和
剪叉杆件,实现机械手机械臂整体的上升和下降,使机械臂的工作范围极大增加,并且使机械手升降过程中保持平稳;3、z向旋转驱动机构包括第二步进电机、第二小带轮、第二中间带轮和第二大带轮,第二步进电机固定在从动臂后端位置,从而减轻机械手末端的重量,提高机械手末端的灵活性;4、机械爪手包括爪手外壳、舵机、舵盘和两个侧滑块,通过舵机控制舵盘来使两个侧滑块相对移动,实现抓取采样功能,结构紧凑、工作稳定;5、每个主驱动机构均包括第一步进电机、第一小带轮、第一中间带轮和第一大带轮,z向旋转驱动机构包括第二步进电机、第二小带轮、第二中间带轮和第二大带轮,中间带轮的作用能够起到过渡传动的作用力,使各个驱动机构能够合理布置。
附图说明
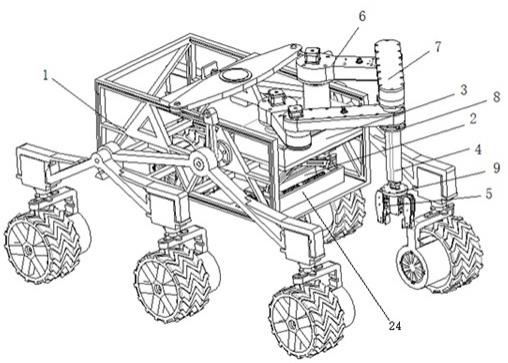
13.图1为本发明所述并联机械手火星车结构示意图;图2为本发明所述主动臂和从动臂配合示意图;图3为本发明所述主驱动机构和z向旋转驱动机构结构示意图;图4为本发明所述升降装置示意图;图5为本发明所述机械爪手结构示意图;图6为本发明所述机械爪手内部示意图;图中:1、移动车体,2、升降装置,21、第三步进电机,22、第三小带轮,23、第三大带轮,24、底部滑槽,25、双向螺杆,26、剪叉杆件,27、顶部滑槽,28、螺杆滑块,3、机械手底座,31、第一步进电机,32、第一小带轮,33、第一中间带轮,34、第一大带轮,35、转动台,4、z向伸缩臂,5、机械爪手,51、爪手外壳,52、舵机,53、舵盘,54、侧滑块,55、滑杆,56、指尖,57、连接杆,6、主动臂,7、从动臂,71、第二步进电机,72、第二小带轮,73、第二中间带轮,74、第二大带轮,8、腕部连接盘,9、多孔圆盘。
具体实施方式
14.下面结合附图与实施例对本发明作进一步说明应该指出,以下详细说明都是例示性的,旨在对本技术提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本技术所属技术领域的普通技术人员通常理解的相同含义。
15.在本发明中,术语如“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“侧”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,只是为了便于叙述本发明各部件或元件结构关系而确定的关系词,并非记特指本发明中任意部位或元件,不能理解为对本发明的限制。
16.如图1-2所示,本实施例公开一种并联机械手火星车,其主要包括移动车体1、升降装置2、机械手底座3、z向伸缩臂4、z向旋转驱动机构、机械爪手5、两个主驱动机构、两个主动臂6和两个从动臂7等部分。移动车体1为适用火星地表运行的常规探测车体,在整体设计上看,升降装置2安装在移动车体1的基座上,机械手底座3安装在升降装置2的顶部。
17.其中,机械手底座3为箱体结构,将两个主驱动机构均设置在机械手底座3内部,每
个主驱动机构均包括第一步进电机31、第一小带轮32、第一中间带轮33和第一大带轮34。第一中间带轮33和第一大带轮34均通过轴承组件转动连接在机械手底座3上,第一步进电机31的输出轴连接第一小带轮32,第一小带轮32通过同步带传动连接第一中间带轮33,第一中间带轮33通过同步带传动连接第一大带轮34,第一大带轮34的顶部通过支撑轴安装有转动台35,转动台35与主动臂6的后端固定连接为一体。如此设计,第一步进电机31可以通过第一小带轮32、第一中间带轮33和第一大带轮34带动主动臂6旋转。
18.如图3所示,为了减轻机械手臂的重量,主动臂6和从动臂7均设计为长形中空结构。两个主动臂6的前端均通过转轴转动连接从动臂7的后端,两个从动臂7的前端通过转轴互相铰接形成机械手末端,机械手末端的底部转动连接有腕部连接盘8,腕部连接盘8与z向伸缩臂4的顶端固定连接,在本实施例中,z向伸缩臂4选用多节伸缩气缸。多节伸缩气缸的气源装备放置在移动车体1内,多节伸缩气缸避免了螺旋副对机械爪手5空间位姿的影响,降低了驱动难度,在控制方面更加简单,并且现在的多节气缸的精度已经完全满足了本设计的精度要求。
19.将z向旋转驱动机构设置在一个从动臂7内,z向旋转驱动机构包括第二步进电机71、第二小带轮72、第二中间带轮73和第二大带轮74,第二中间带轮73和第二大带轮74均通过轴承组件转动连接在从动臂7内。为了减小从动臂7的转动惯量,将第二步进电机71固定在从动臂7后端位置、其输出轴连接第二小带轮72,第二小带轮72通过同步带传动连接第二中间带轮73,第二中间带轮73通过同步带传动连接第二大带轮74,第二大带轮74的底部与腕部连接盘8固定连接。如此设计,第二步进电机71可以通过第二小带轮72、第二中间带轮73和第二大带轮74带动腕部连接盘8旋转,从而使z向伸缩臂4绕z轴旋转。
20.如图5-6所示,机械爪手5包括爪手外壳51、舵机52、舵盘53和两个侧滑块54,舵机52安装在爪手外壳51的前侧壁上,舵盘53位于爪手外壳51内并与舵盘53的输出轴连接,如此设计,舵机52能够控制舵盘53回转摆动。在爪手外壳51的上、下两端分别固定安装有左右横向分布的滑杆55,两个侧滑块54分别滑动连接在滑杆55的左右两端,在每个侧滑块54的底部设有指尖56,舵盘53的左右两侧分别铰接有连接杆57,连接杆57的另一端铰接在同侧的侧滑块54内壁上。当舵盘53转动时能够通过连接杆控制对应的侧滑块54在滑杆55上滑动,实现机械爪手5的开启和闭合。在z向伸缩臂4的底部固定有多孔圆盘9,多孔圆盘9通过螺栓固定爪手外壳51顶部连接板上。如此设计,可以通过对机械爪手5的整体更换,达到轻松更换末端执行机构的目的,以实现不同的工作要求。
21.如图4所示,升降装置2包括第三步进电机21、第三小带轮22、第三大带轮23、底部滑槽24、双向螺杆25和剪叉杆件26。第三步进电机21和底部滑槽24设置在移动车体1的基座上,双向螺杆25的左右两端转动连接在底部滑槽24的左右两端上,第三大带轮23固定在双向螺杆25的端部,第三步进电机21的输出轴连接第三小带轮22,第三小带轮22通过同步带连接第三大带轮23。双向螺杆25的杆身上设有左右两段相反走向的螺纹,双向螺杆25的两段反向螺纹上分别连接有螺杆滑块28,螺杆滑块28能够配合在底部滑槽24内往返滑动。剪叉杆件26是由两根升降板交叉分布组成,剪叉杆件26的两底端分别对应铰接在两个螺杆滑块上。在机械手底座3的底部设有顶部滑槽27,剪叉杆件26的两底端分别通过滑动块滑动连接在顶部滑槽27内。第三步进电机21通过第三小带轮22、第三大带轮23控制双向螺杆25转动,从而控制剪叉杆件26运动,实现机械手底座3的升降,整个升降过程保持平稳。
22.本发明所述并联机械手火星车具体工作过程如下:移动车体1带动机械手到特定位置,通过升降装置2带动机械手底座3上升到合适位置;两个主驱动机构单独控制主动臂6转动一定的角度,由于主动臂6和从动臂7并联形式在整体上是平面五杆机构,从而具有两个自由度,通过两个主动臂6的转动对两个从动臂7的位置进行控制,从而可以实现机械手末端在x-y平面上的定位。第二步进电机71可以通过第二小带轮72、第二中间带轮73和第二大带轮74带动腕部连接盘8旋转,从而使z向伸缩臂4绕z轴旋转,z向伸缩臂4控制机械爪手5上下伸缩。最终,使机械爪手5在空间内到达指定采样位置,机械爪手5开合进行取样。
23.本发明的机械手有四个自由度,可以实现平面上沿着三个坐标轴方向上的平动和绕着一个坐标轴的转动。两个主驱动机构均设置在移动车体1上,主动臂6、从动臂7采用并联方式,从而极大地增加了机械臂的精度,与传统的scara机器人相比,本发明总体上减少了机械手末端运动部分的重量,减少了整个机械臂对回转轴的转动惯量,使得机器人有更高的运动速度和定位精度;本发明的机械手整体结构紧凑、质量轻且操作灵活、定位精度高。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1