动态成像卫星姿控系统执行器故障重构方法
本发明涉及卫星故障诊断领域,具体涉及一种动态成像卫星的姿控系统执行器故障重构方法。
背景技术:
1、航天遥感提供的信息资源应用程度越来越高,为信息的多角度融合提供的支撑作用逐步上升。针对遥感应用的迫切需求,推扫、摆扫、环扫等动态成像模式,凭借高机动性,可以实现广域普查、大范围区域影像数据生成。此类动态成像的实现,对卫星姿态控制提出了严苛的要求。执行器故障的存在,会破坏卫星姿态控制系统的稳定性,导致观测任务失败,甚至影响卫星的安全性。因此,关于执行器的故障诊断研究是重点关注之一。
2、相对于刚体卫星,挠性卫星装备了多功能附属件,如大尺寸太阳帆板、高功率天线,具有更高的系统性能以及更丰富的任务功能。同时,这些附属件大多表现出挠性,在卫星机动过程中将对卫星本体反馈挠性振动。因此,与刚体卫星不同,挠性部件与刚体部分的强耦合特性为执行器故障的重构增加了复杂性和困难。传统的基于自适应观测器的故障估计方法一般将执行器故障与挠性振动、外部干扰等因素看作为一个总的干扰量进行估计,再而其无法有效地将执行器故障与挠性干扰分离,得到的故障估计信息准确度低,尤其是微弱故障。
技术实现思路
1、本发明为解决传统基于自适应观测器的故障估计方法无法有效处理具有挠性附属件的挠性卫星的执行器故障与挠性振动信号难以分离以及故障估计值精度低等问题。提供一种动态成像卫星姿控系统执行器故障重构方法。
2、动态成像卫星姿控系统执行器故障重构方法,该方法由以下步骤进进行:
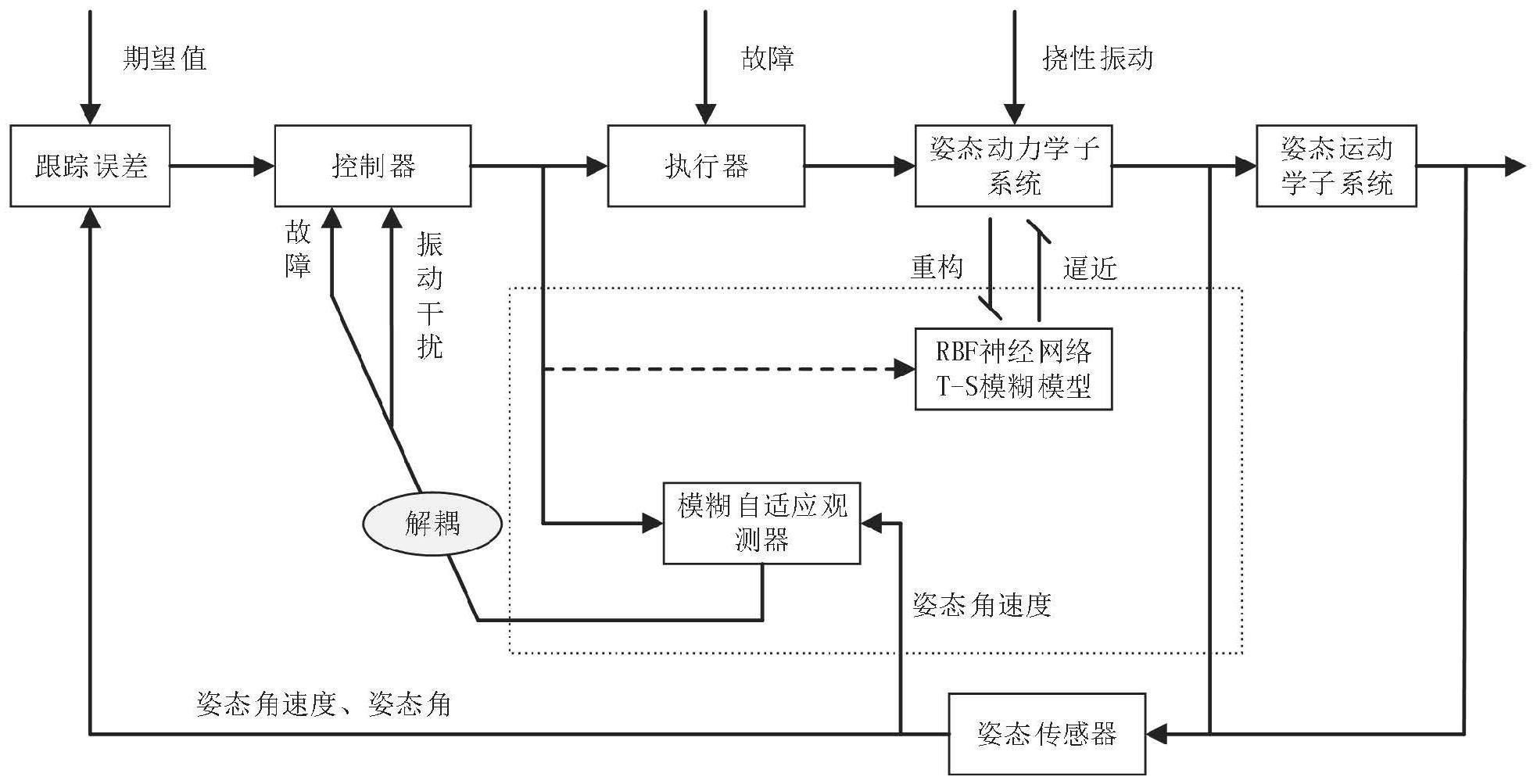
3、步骤一、根据动态成像卫星姿态控制系统动态特性,确定执行器故障、挠性振动模型,建立基于rbf神经网络与t-s模糊建模方法的卫星姿态动力学子系统数学模型;
4、该模型中,仅姿态角速度作为前件变量,挠性振动源构建为线性空间表达式的形式,挠性振动信号重建为rbf神经网络模型;
5、步骤二、根据步骤一确定的基于rbf神经网络与t-s模糊建模方法的卫星姿态动力学子系统数学模型,设计模糊自适应故障估计观测器模型,建立动态误差系统及其增广动态误差方程;执行器故障与挠性振动实现了分离以及估计值的同时获取,且故障与挠性振动的估计值均有上下界约束;
6、步骤三、根据步骤二中设计基于模糊自适应观测器以及增广动态误差方程,给出保证自适应观测器成立的稳定性条件,并以线性矩阵不等式形式表示;引入h∞性能优化指标与区域极点配置方法,求解观测器增益矩阵
7、步骤四、根据步骤三中给出的自适应观测器成立的稳定性条件,给出基于自适应观测器的执行器故障估计的设计参数。
8、本发明的有益效果:本发明方法通过将卫星姿态系统的动力学子系统重建为高精度的rbf神经网络与takagi-sugeno(t-s)模糊模型,进而设计模糊自适应观测器,实现执行器故障与挠性振动信号的分离、估计值的同时获取,从而得到较高精度和准确度的执行器故障信息。具备以下优点:
9、一、相较于传统的基于自适应观测器的故障估计方法直接获取执行器故障与挠性干扰的集总干扰值,其存在无法将执行器故障与挠性干扰进行分离,故障估计准确度低等问题,所提出的方法实现了执行器故障与挠性振动信号的分离、估计值的同时获取,有效提升了故障估计的准确度和精度。
10、二、本发明采用rbf神经网络与t-s模糊模型建模方法重构卫星姿态动力学子系统,将非线性系统由多个线性子系统通过隶属度函数平滑连接,线性系统的很多成熟的分析与设计工具均可以得到应用。采用线性矩阵不等式与区域极点配置技术相结合来提升算法的性能,同时便于参数求解与算法实现。
技术特征:
1.动态成像卫星姿控系统执行器故障重构方法,其特征是:该方法由以下步骤实现:
2.根据权利要求1所述的动态成像卫星姿控系统执行器故障重构方法,其特征在于:步骤一中得到的基于rbf神经网络模型与t-s模糊建模方法的卫星姿态动力学子系统数学模型:
3.根据权利要求2所述的动态成像卫星姿控系统执行器故障重构方法,其特征在于:步骤二所述的模糊自适应故障估计观测器模型为:
4.根据权利要求3所述的动态成像卫星姿控系统执行器故障重构方法,其特征在于:步骤三的具体过程为:
5.根据权利要求4所述的动态成像卫星姿控系统执行器故障重构方法,其特征在于:步骤四的具体过程为:
技术总结
动态成像卫星姿控系统执行器故障重构方法,涉及卫星故障诊断领域,为解决传统基于自适应观测器的故障估计方法无法有效处理具有挠性附属件的挠性卫星的执行器故障与挠性振动信号难以分离以及故障估计值精度低等问题。本发明方法通过将卫星姿态系统的动力学子系统重建为高精度的RBF神经网络与T‑S模糊模型,设计模糊自适应观测器,实现执行器故障与挠性振动信号的分离、估计值的同时获取,得到较高精度和准确度的执行器故障信息。本方法将非线性系统由多个线性子系统通过隶属度函数平滑连接,线性系统的很多成熟的分析与设计工具均可以得到应用。采用线性矩阵不等式与区域极点配置技术相结合来提升算法的性能,同时便于参数求解与算法实现。
技术研发人员:徐伟,常琳,黎艳博,吴永杰
受保护的技术使用者:中国科学院长春光学精密机械与物理研究所
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!