一种大负载抗干扰无人机的制作方法
本发明涉及无人机,具体涉及一种大负载抗干扰无人机。
背景技术:
1、无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。无人机实际上是无人驾驶飞行器的统称,从技术角度定义可以分为:无人直升机、无人固定翼机、无人多旋翼飞行器、无人飞艇、无人伞翼机这几大类;大负载抗干扰无人机,支持电力场景应用抗电磁干扰稳定运行,负载可超过20千克,有效负载续航时间可超过20分钟,目前,大负载无人机在植保、测绘、救援等场所以得到广泛运用。
2、目前,当发生自然灾害车辆无法及时靠近救援区域,会用到大负载无人机对救援区域运输物资或仪器,在通过大负载无人机对物资或仪器进行运送过程中,为避免物资或仪器的重心影响导致无人机发生倾斜,影响无人机正常飞行,需要使物资与仪器的重心与无人机的重心位于同一垂直面上,但是,当物资或仪器形状不规则时,物资或仪器的重心不在其中心处时,导致对物资或仪器的固定较为不便,从而降低工作人员的工作效率,影响对救援区域物资或仪器运送及时性,鉴于此,本申请提出了一种大负载抗干扰无人机。
技术实现思路
1、本发明的目的在于:为解决上述背景技术中所提出的问题,本发明提供了一种大负载抗干扰无人机。
2、本发明为了实现上述目的具体采用以下技术方案:
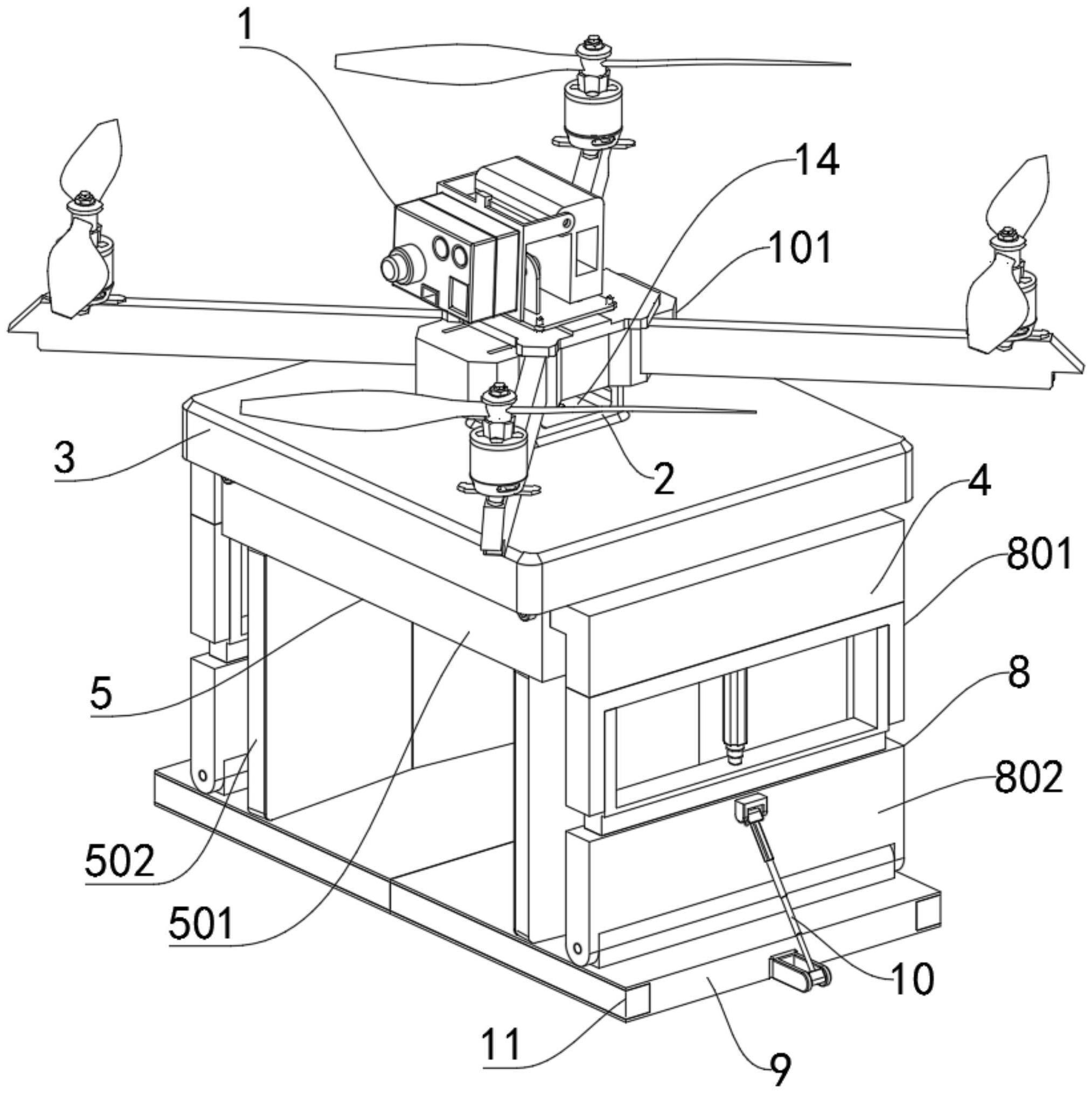
3、一种大负载抗干扰无人机,包括无人机本体,所述无人机本体包括外壳,所述外壳底部中间位置固定安装有连接块,所述连接块底部固定安装有安装块,所述安装块底部安装有调节机构,所述调节机构的另一端安装有安装板,所述安装板底部安装有固定机构;
4、所述固定机构包括通过螺丝固定安装在安装板底部的固定板,所述固定板底部滑动安装有两个夹持板,所述固定板上安装有与两个夹持板均相连接的驱动件,其用于使两个夹持板在固定板上反向滑动或停止滑动;
5、所述连接块的中间位置开设有安装孔,所述连接块上且位于安装孔内固定安装有斜度传感器,调节机构用于对安装板在安装块底部位置进行调节。
6、可选地,所述调节机构包括:
7、移动板,所述安装块底部开设有安装槽,所述移动板呈水平方向滑动安装在安装槽内,所述安装槽内固定安装有与移动板相连接的电滑块一,所述安装板呈水平方向滑动安装在移动板上,所述移动板上固定安装有与安装板相连接的电滑块二。
8、可选地,两个所述夹持板的横截面均呈v字型,且两个夹持板的相对侧均固定安装有橡胶板,所述驱动件包括:
9、双向螺纹杆,所述双向螺纹杆转动安装在固定板上,且双向螺纹杆与两个夹持板均螺纹连接,所述固定板上固定安装有用于驱使双向螺纹杆进行转动的电机。
10、可选地,所述安装板底部安装有缓冲机构,所述缓冲机构包括:
11、缓冲板,数量为两个,两个所述缓冲板均固设在安装板底部,且两个缓冲板分别位于两个夹持板相互远离的一侧,所述缓冲板外部活动套设有抵触块,所述抵触块内且位于抵触块与缓冲板的相对侧安装有缓冲件。
12、可选地,所述缓冲件包括固设在抵触块内的壳体,所述壳体的顶部活动贯穿有与缓冲板相固接的缓冲杆,所述抵触块内安装有套设在壳体外部的弹簧,所述缓冲杆外部套设有阻尼套。
13、可选地,所述缓冲板包括与安装板相固接的连接架,所述连接架上呈竖直方向滑动安装有连接板,所述连接架上固定安装有与连接板相连接的电推杆一,所述抵触块活动套设在连接板外部,所述抵触块底部铰接有底板,所述抵触块上安装有用于驱使底板在抵触块上绕自身铰接点进行转动的电推杆二。
14、可选地,当底板与抵触块相垂直时,两个所述底板的相对侧相贴合,所述底板的两侧均开设有容纳槽,所述底板上且位于容纳槽内固定安装有保护机构。
15、可选地,所述保护机构包括:
16、安装壳,顶部呈开口状,所述安装壳滑动安装在所述容纳槽内,所述容纳槽内固定安装有气囊,所述容纳槽内固定安装有与安装壳相连接的电推杆三。
17、可选地,所述安装壳包括滑动安装在容纳槽内的安装架,所述安装架上通过销轴铰接有容纳壳,所述容纳壳顶部呈开口状,所述气囊固定安装在容纳壳内,所述安装架上安装有用于驱使容纳壳进行转动的驱动机构。
18、可选地,所述驱动机构包括与销轴同轴固接的从动齿轮,所述安装架上固定安装有电动机,所述电动机的输出轴固定安装有主动齿轮,且主动齿轮与从动齿轮相啮合。
19、与现有技术相比,本发明的有益效果如下:
20、1.本发明通过设置斜度传感器和调节机构,当运输的物资或仪器形状不规则时,可实现将物资或仪器的重心处自动调节至无人机本体正下方,从而使得无人机本体处于平衡状态,从而在对形状不规则的物资或仪器进行运输时,方便了对形状不规则的物资或仪器进行固定,提高了工作人员的工作效率,提高了对救援区域物资或仪器运送及时性。
21、2.本发明通过设置固定机构,方便了对物资和仪器进行固定,同时,在对如火灾事故等导致本无人机本体无法落至救援区域地面的救援区域进行运输物资时,通过控制电机使两个夹持板在固定板上相互远离,使两个夹持板均不与物资进行接触时,物资即可从两个夹持板的相对侧进行掉落,从而实现对物资进行投放,从而提高了本装置的实用性。
技术特征:
1.一种大负载抗干扰无人机,包括无人机本体(1),其特征在于,所述无人机本体(1)包括外壳(101),所述外壳(101)底部中间位置固定安装有连接块(2),所述连接块(2)底部固定安装有安装块(3),所述安装块(3)底部安装有调节机构(7),所述调节机构(7)的另一端安装有安装板(4),所述安装板(4)底部安装有固定机构(5);
2.根据权利要求1所述的一种大负载抗干扰无人机,其特征在于,所述调节机构(7)包括:
3.根据权利要求1所述的一种大负载抗干扰无人机,其特征在于,两个所述夹持板(502)的横截面均呈v字型,且两个夹持板(502)的相对侧均固定安装有橡胶板,所述驱动件(503)包括:
4.根据权利要求1所述的一种大负载抗干扰无人机,其特征在于,所述安装板(4)底部安装有缓冲机构(8),所述缓冲机构(8)包括:
5.根据权利要求4所述的一种大负载抗干扰无人机,其特征在于,所述缓冲件(803)包括固设在抵触块(802)内的壳体(8031),所述壳体(8031)的顶部活动贯穿有与缓冲板(801)相固接的缓冲杆(8032),所述抵触块(802)内安装有套设在壳体(8031)外部的弹簧(8033),所述缓冲杆(8032)外部套设有阻尼套。
6.根据权利要求4所述的一种大负载抗干扰无人机,其特征在于,所述缓冲板(801)包括与安装板(4)相固接的连接架(8011),所述连接架(8011)上呈竖直方向滑动安装有连接板(8012),所述连接架(8011)上固定安装有与连接板(8012)相连接的电推杆一(8013),所述抵触块(802)活动套设在连接板(8012)外部,所述抵触块(802)底部铰接有底板(9),所述抵触块(802)上安装有用于驱使底板(9)在抵触块(802)上绕自身铰接点进行转动的电推杆二(10)。
7.根据权利要求6所述的一种大负载抗干扰无人机,其特征在于,当底板(9)与抵触块(802)相垂直时,两个所述底板(9)的相对侧相贴合,所述底板(9)的两侧均开设有容纳槽(12),所述底板(9)上且位于容纳槽(12)内固定安装有保护机构(11)。
8.根据权利要求7所述的一种大负载抗干扰无人机,其特征在于,所述保护机构(11)包括:
9.根据权利要求8所述的一种大负载抗干扰无人机,其特征在于,所述安装壳(1101)包括滑动安装在容纳槽(12)内的安装架(11011),所述安装架(11011)上通过销轴铰接有容纳壳(11012),所述容纳壳(11012)顶部呈开口状,所述气囊(1102)固定安装在容纳壳(11012)内,所述安装架(11011)上安装有用于驱使容纳壳(11012)进行转动的驱动机构(13)。
10.根据权利要求9所述的一种大负载抗干扰无人机,其特征在于,所述驱动机构(13)包括与销轴同轴固接的从动齿轮(1303),所述安装架(11011)上固定安装有电动机(1301),所述电动机(1301)的输出轴固定安装有主动齿轮(1302),且主动齿轮(1302)与从动齿轮(1303)相啮合。
技术总结
本发明涉及无人机技术领域,具体的公开了一种大负载抗干扰无人机。本发明包括无人机本体,所述无人机本体包括外壳,所述外壳底部中间位置固定安装有连接块,所述连接块底部固定安装有安装块,所述安装块底部安装有调节机构,所述调节机构的另一端安装有安装板,所述安装板底部安装有固定机构。本发明通过设置斜度传感器和调节机构,当运输的物资或仪器形状不规则时,可实现将物资或仪器的重心处自动调节至无人机本体正下方,从而使得无人机本体处于平衡状态,从而在对形状不规则的物资或仪器进行运输时,方便了对形状不规则的物资或仪器进行固定,提高了工作人员的工作效率,提高了对救援区域物资或仪器运送及时性。
技术研发人员:杨冬,杜柏林,陈美权,张宿新,金亚曦
受保护的技术使用者:国网安徽省电力有限公司马鞍山供电公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!