一种小行星着陆附着机构的制作方法
本发明涉及航天器着陆领域,尤其涉及一种小行星着陆附着机构。
背景技术:
1、当前,对于探索小行星探索来说,要求完成的任务有限,所携带的科学仪器等各种有效载荷很多,但是小行星的表面引力极其弱小,飞行器与小行星着陆时,相互碰撞的量级相对较弱,飞行器相对缓冲能量会非常小,且着陆后需要锚定以便飞行器固定着陆。
2、深空探测领域内小行星弱引力、自转、表面凹凸不平的附着环境着陆要求,具有弱碰撞、防反弹、防倾覆、附着可靠、适应性强等复杂问题。
技术实现思路
1、为解决上述技术问题,本发明目的通过以下技术方案予以实现:
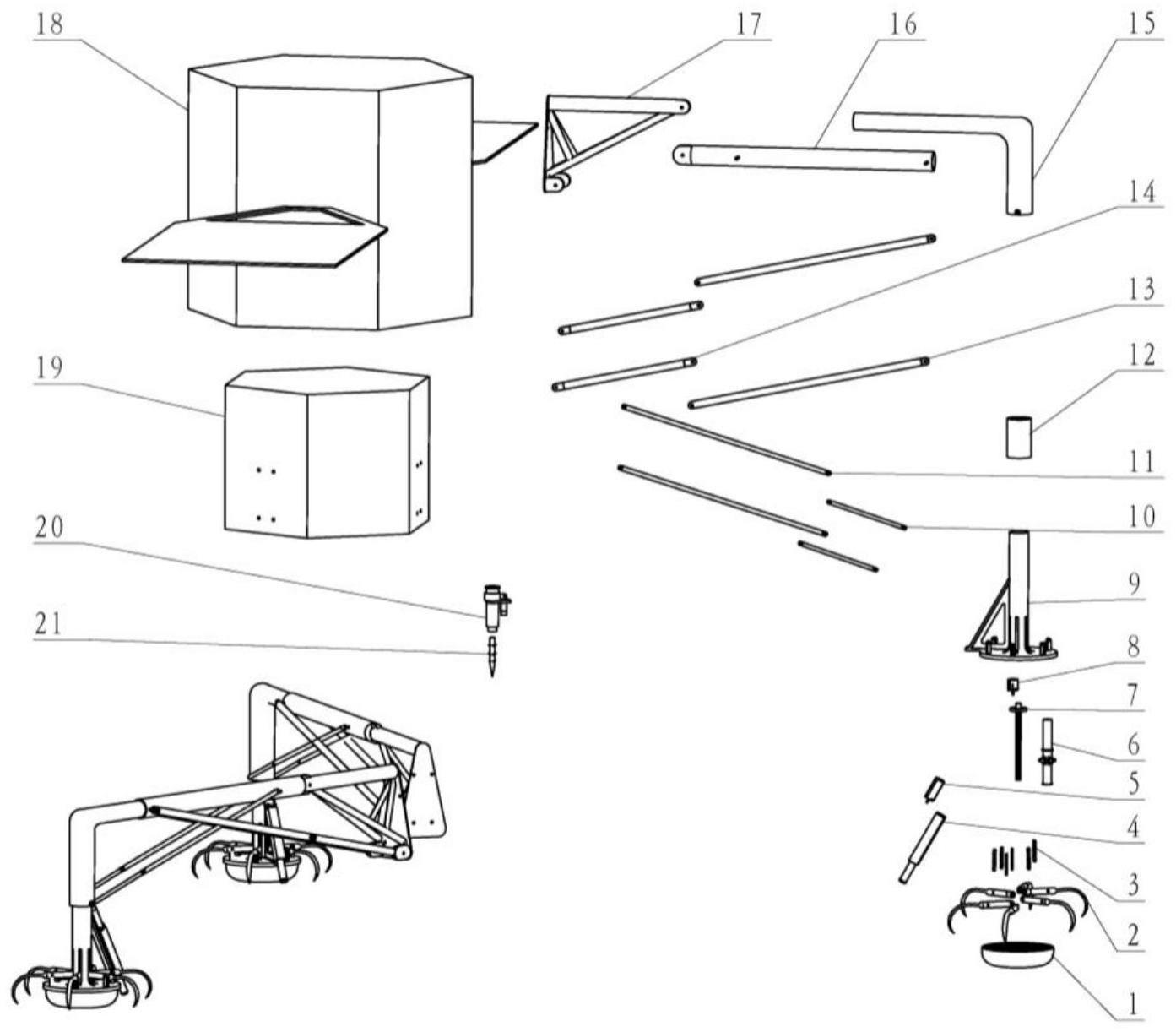
2、一种小行星着陆附着机构,其特征在于,包括:安装在飞行器18的底部的附着系统控制箱19、和安装在附着系统控制箱19侧面的多套着陆腿组件,
3、每套所述着陆腿组件包括依次连接的着陆腿9、着陆腿支撑座15、着陆腿连杆16、着陆腿固定座17,所述着陆腿固定座17固定于所述附着系统控制箱19,所述着陆腿支撑座15和着陆腿连杆16构成移动副,可以相对滑动,
4、所述着陆腿9最下端安装有缓冲脚垫1,在下侧还安装有仿生鸟爪2,所述仿生鸟爪2包括多根鸟趾,可切换展开或抓取两种状态,
5、两套由着陆腿连杆a10和着陆腿连杆b11组成的连杆件安装在所述着陆腿支撑座15和着陆腿连杆16的两侧,组成第一连杆机构,控制着陆腿支撑座15和着陆腿连杆16滑动,实现着陆腿9的收拢与展开,
6、两套由展开连杆a13和展开连杆b14组成连杆件安装在着陆腿连杆16和着陆腿固定座17的两侧,组成的第二连杆机构实现着陆腿连杆16的转位。
7、进一步的是,所述着陆腿9的上端带有铝蜂窝缓冲块12,所述着陆腿9和所述铝蜂窝缓冲块12一并安装在着陆腿支撑座15的一端并固定。
8、进一步的是,在着陆腿9内部安装有鸟爪驱动丝杠7,鸟爪驱动座6安装在鸟爪驱动丝杠7上构成丝杠螺母副,鸟爪驱动电机8安装在鸟爪驱动丝杠7上端,用于驱动鸟爪驱动丝杠7,实现仿生鸟爪2的展开与抓取。
9、进一步的是,其进一步包括弹簧3,所述弹簧3一端与着陆腿9连接,另一端连接安装在鸟爪驱动座6上。
10、进一步的是,在所述着陆腿9的侧面一并安装有岩石钻4、岩石钻驱动电机5,且岩石钻驱动电机5安装在岩石钻4末端,岩石钻4用于着陆后,岩石钻驱动电机5驱动钻头钻入地表加固着陆腿的稳定性。
11、进一步的是,附着系统控制箱19的侧面安装有锚定座20,铆钉枪21安装在锚定座20上,铆钉枪21有足够长的绳索与锚定座20连接,铆钉枪21高速射出后多余的绳索由锚定座20收回并施加张紧力,加固飞行器18与着陆面固定。
12、进一步的是,所述着陆腿支撑座15固定安装在着陆腿连杆16上,着陆腿连杆16可转动地安装在着陆腿固定座17上。
13、进一步的是,所述着陆腿连杆a10、着陆腿连杆b11、展开连杆a13和展开连杆b14组成的连杆机构实现着陆腿9的收拢与展开。
14、进一步的是,所述多套着陆腿组件为均布在飞行器18的周围的三套着陆腿组件。
15、进一步的是,其用于深空探测的小行星表面着陆附着任务。
16、本发明相比于现有技术具有如下有益效果:
17、1本发明提供的一种小行星着陆附着机构,为一种采用了连杆机构实现着陆腿的收拢和展开,采用缓冲脚垫、仿生鸟爪、岩石钻和铆钉枪相结合的多种着陆方式相结合的陆着陆附着方案,能适应多种复杂小行星未知表面。
18、2本小行星着陆附着机构的连杆机构展开采用储力弹簧实现无源展开,展开后连杆能够自动锁定;
19、3本发明飞行器和附着系统控制箱链接采用可分离式链接,即飞行器可以二次起飞;
20、4本发明具有着陆附着可靠、操作简单、安装便捷、加工工艺及经济性好等优点。
技术特征:
1.一种小行星着陆附着机构,其特征在于,包括:安装在飞行器(18)的底部的附着系统控制箱(19)、和安装在附着系统控制箱(19)侧面的多套着陆腿组件,
2.根据权利要求1所述的小行星着陆附着机构,其特征在于,所述着陆腿(9)的上端带有铝蜂窝缓冲块(12),所述着陆腿(9)和所述铝蜂窝缓冲块(12)一并安装在着陆腿支撑座(15)的一端并固定。
3.根据权利要求1所述的小行星着陆附着机构,其特征在于,在着陆腿(9)内部安装有鸟爪驱动丝杠(7),鸟爪驱动座(6)安装在鸟爪驱动丝杠(7)上构成丝杠螺母副,鸟爪驱动电机(8)安装在鸟爪驱动丝杠(7)上端,用于驱动鸟爪驱动丝杠(7),实现仿生鸟爪(2)的展开与抓取。
4.根据权利要求3所述的小行星着陆附着机构,其特征在于,其进一步包括弹簧(3),所述弹簧(3)一端与着陆腿(9)连接,另一端连接安装在鸟爪驱动座(6)上。
5.根据权利要求1所述的小行星着陆附着机构,其特征在于,在所述着陆腿(9)的侧面一并安装有岩石钻(4)、岩石钻驱动电机(5),且岩石钻驱动电机(5)安装在岩石钻(4)末端,岩石钻(4)用于着陆后,岩石钻驱动电机(5)驱动钻头钻入地表加固着陆腿的稳定性。
6.根据权利要求1所述的小行星着陆附着机构,其特征在于,附着系统控制箱(19)的侧面安装有锚定座(20),铆钉枪(21)安装在锚定座(20)上,铆钉枪(21)有足够长的绳索与锚定座(20)连接,铆钉枪(21)高速射出后多余的绳索由锚定座(20)收回并施加张紧力,加固飞行器(18)与着陆面固定。
7.根据权利要求1所述的小行星着陆附着机构,其特征在于,所述着陆腿支撑座(15)固定安装在着陆腿连杆(16)上,着陆腿连杆(16)可转动地安装在着陆腿固定座(17)上。
8.根据权利要求1所述的小行星着陆附着机构,其特征在于,所述着陆腿连杆a(10)、着陆腿连杆b(11)、展开连杆a(13)和展开连杆b(14)组成的连杆机构实现着陆腿(9)的收拢与展开。
9.根据权利要求1所述的小行星着陆附着机构,其特征在于,所述多套着陆腿组件为均布在飞行器(18)的周围的三套着陆腿组件。
10.根据权利要求1所述的小行星着陆附着机构,其特征在于,其用于深空探测的小行星表面着陆附着任务。
技术总结
本发明提供了一种小行星着陆附着机构,其特征在于,包括:安装在飞行器(18)的底部的附着系统控制箱(19)、和安装在附着系统控制箱(19)侧面的多套着陆腿组件,每套所述着陆腿组件包括依次连接的着陆腿(9)、着陆腿支撑座(15)、着陆腿连杆(16)、着陆腿固定座(17),所述着陆腿固定座(17)固定于所述附着系统控制箱(19),所述着陆腿支撑座(15)和着陆腿连杆(16)构成移动副,可以相对滑动,所述着陆腿(9)最下端安装有缓冲脚垫(1),在下侧还安装有仿生鸟爪(2),所述仿生鸟爪(2)包括多根鸟趾,可切换展开或抓取两种状态。本发明能适应多种复杂小行星未知表面,着陆可靠、操作简单、安装便捷、加工工艺及经济性好。
技术研发人员:房光强,刘钰,刘大利,王治易,谢超,高洋
受保护的技术使用者:上海宇航系统工程研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!