一种双涵道飞行器栅格舵面航向控制机构及双涵道飞行器的制作方法
本发明涉及地空一体涵道飞行器领域,具体涉及一种双涵道飞行器栅格舵面航向控制机构及双涵道飞行器。
背景技术:
1、地空一体平台,如既可以在地面上像汽车一样行驶又可以在空中飞行的飞行汽车作为一种新概念飞行器,在国内外形成了研究热潮。飞行汽车平时可作为汽车在路面上行驶,可以最大限度的节省能源;在关键时候可以在空中自由飞行,突出了快捷方便的优势。
2、地空一体平台的任务剖面决定平台的构型和布局。从适应复杂环境考虑,地空一体超机动平台需兼顾两种运动模式,并可随时切换;从能源供应考虑,平台的驱动、伺服控制单元应集中布置,管路、线路尽可能短。从通过性考虑,平台又需要体积尽可能小;上述各设计约束互相矛盾。
3、通过驱动复用、能源统一、机构精简等方式,通过对多种方案的气动效率、机构重量、功耗情况、综合性能等多设计约束的参数对比与分析,采用中央串列双涵道升力构型。与常规式开放式旋翼直升机相比,其尺寸显著减少,可以提升其储运、操纵性能。与共轴式的直升机相比,其气动、平衡、操稳、振动等问题较易解决,性能和成本均可接受。涵道风扇系统气动效率高、噪声低、结构紧凑,相较于开放式外转子旋翼形式具有更好的安全性。
4、在中央升力涵道布局形式中,前后各有一个涵道旋翼,两幅桨叶尺寸、形式完全相同,转速相同但旋转方向相反,产生的反作用扭矩可以相互平衡。但由于制造的偏差或者电动机转速——扭矩特性的差异,会造成扭矩平衡的破坏;同时在进行旋翼操控时转速的频繁改变会造成涵道气流的高速冲击,提升了涵道旋翼的操控难度。
5、因此,这就迫切需要一种双涵道飞行器的航向控制机构。
技术实现思路
1、本发明为了解决现有技术中的问题,提供一种双涵道飞行器栅格舵面航向控制机构及双涵道飞行器。
2、为解决上述技术问题,本发明采用如下技术方案:
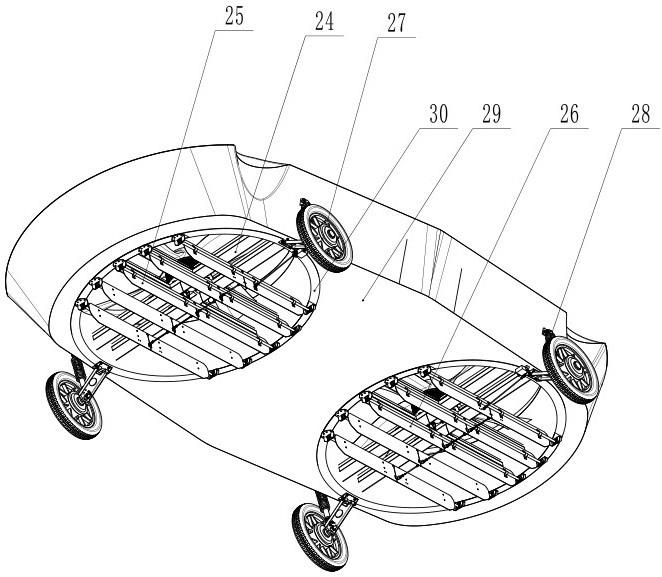
3、一种双涵道飞行器栅格舵面航向控制机构,包括前后两组栅格舵面,分别为前栅格舵面和后栅格舵面,前栅格舵面安装在顺时针旋转的前涵道桨叶的下方,后栅格舵面安装在逆时针旋转的后涵道桨叶的下方;前栅格舵面和后栅格舵面分别独立控制其栅格舵面的左右偏转。
4、进一步的,每组栅格舵面均包括平板舵面、舵面转轴、中间连接杆、舵机操控连杆和伺服舵机;
5、在前、后涵道桨叶的涵道底部外圈前后位置对称设有两个圆弧形安装板,两个圆弧形安装板之间排布设有奇数片平板舵面,平板舵面包括位于中间的第一平板舵面,以及在第一平板舵面左右两侧对称布置并从中间向外侧依次排布的第二平板舵面组、第三平板舵面组、第四平板舵面组……;
6、每片平板舵面均沿前后方向延伸,且平板舵面上设有前后方向延伸的舵面转轴,舵面转轴的两端与对应的圆弧形安装板转动连接;
7、相邻的两片平板舵面之间通过中间连接杆关联在一起,中间连接杆的两端与相邻的两片平板舵面转动配合;
8、在侧边的平板舵面上连接有舵机操控连杆,舵机操控连杆连接在伺服舵机摇臂上,伺服舵机安装在机体涵道底部外圈上。
9、进一步的,从第一平板舵面到第二平板舵面组、第三平板舵面组、第四平板舵面组……,平板舵面的长度依次减少。
10、进一步的,所述平板舵面为上下圆角的矩形,每片平板舵面由两片相同的薄板组成,在中间通过中联片固定在一起。
11、进一步的,所述中间连接杆与平板舵面的连接方式如下:平板舵面的中间位置设有连杆角片,中间连接杆的两端设有杆端轴承与连杆角片转动连接。
12、进一步的,所述舵机操控连杆与平板舵面的连接方式如下:平板舵面的中间位置设有连杆角片,舵机操控连杆的一端设有杆端轴承与连杆角片转动连接。
13、进一步的,所述舵面转轴的位置基本位于平板舵面的气动焦点处。
14、进一步的,所述舵面转轴与圆弧形安装板的连接方式如下:舵面转轴的两端通过舵面轴承座安装在圆弧形安装板上。
15、进一步的,所述舵机摇臂和平板舵面摇臂的转动比例在1:2到1:4。
16、本发明还公开一种双涵道飞行器,包括所述的双涵道飞行器栅格舵面航向控制机构。
17、本发明的有益效果:
18、1、本发明公开了一种双涵道飞行器栅格舵面航向控制机构,用于双涵道飞行器的航向控制以及双涵道不对称反扭距的平衡调节。其包括前后两组栅格舵面,每组栅格舵面包含平板舵面、舵面转轴、中间连接杆、舵机操控连杆和伺服舵机,平板舵面安装在舵面转轴上,通过舵面轴承座安装在涵道的底部外圈,形成一个整体构件。栅格舵面设置在涵道下方,即中央双涵道的尾流处,前后两组栅格舵面采用独立控制。
19、栅格舵面沿机身方向平行布置,当前后双涵道舵面同时向一侧偏转时,飞行器获得侧向操控力,实现横向运动,当前后双涵道舵面相反方向偏转时,飞行器获得航向偏转力矩,实现转向运动。前后双涵道产生升力差,使飞行器获得前后平飞能力和俯仰控制能力,由此产生的不对称反扭距靠栅格舵面反向差动进行补偿。其优点是完全依靠涵道自身的气流效应进行整机的操控,整机结构尺寸较小,同时将双涵道的航向、侧向控制和俯仰、滚转通道解耦,降低飞行控制的开发难度。
20、2、本发明中舵面转轴的位置基本位于平板舵面的气动焦点处,最大程度的降低了平板舵面的扭转力矩。
21、3、本发明通过栅格舵面航向控制机构,有效解决了传统涵道尾流舵面结构复杂、操控力矩大等缺点,操控机构重量减小20%以上,从而降低了飞行器总重量,降低了涵道功率需求。在大尺寸双涵道飞行器系统,采用此航向控制机构,使航向控制效率提升,同时避免了双涵道升力、航向、侧向、俯仰控制通道的耦合,实现各通道独立控制,降低了飞行控制复杂度。
技术特征:
1.一种双涵道飞行器栅格舵面航向控制机构,其特征在于:包括前后两组栅格舵面,分别为前栅格舵面和后栅格舵面,前栅格舵面安装在顺时针旋转的前涵道桨叶的下方,后栅格舵面安装在逆时针旋转的后涵道桨叶的下方;前栅格舵面和后栅格舵面分别独立控制其栅格舵面的左右偏转。
2.根据权利要求1所述的双涵道飞行器栅格舵面航向控制机构,其特征在于:每组栅格舵面均包括平板舵面、舵面转轴、中间连接杆、舵机操控连杆和伺服舵机;
3.根据权利要求2所述的双涵道飞行器栅格舵面航向控制机构,其特征在于:从第一平板舵面到第二平板舵面组、第三平板舵面组、第四平板舵面组……,平板舵面的长度依次减少。
4.根据权利要求3所述的双涵道飞行器栅格舵面航向控制机构,其特征在于:所述平板舵面为上下圆角的矩形,每片平板舵面由两片相同的薄板组成,在中间通过中联片固定在一起。
5.根据权利要求2所述的双涵道飞行器栅格舵面航向控制机构,其特征在于:所述中间连接杆与平板舵面的连接方式如下:平板舵面的中间位置设有连杆角片,中间连接杆的两端设有杆端轴承与连杆角片转动连接。
6.根据权利要求2所述的双涵道飞行器栅格舵面航向控制机构,其特征在于:所述舵机操控连杆与平板舵面的连接方式如下:平板舵面的中间位置设有连杆角片,舵机操控连杆的一端设有杆端轴承与连杆角片转动连接。
7.根据权利要求2所述的双涵道飞行器栅格舵面航向控制机构,其特征在于:所述舵面转轴的位置基本位于平板舵面的气动焦点处。
8.根据权利要求2所述的双涵道飞行器栅格舵面航向控制机构,其特征在于:所述舵面转轴与圆弧形安装板的连接方式如下:舵面转轴的两端通过舵面轴承座安装在圆弧形安装板上。
9.根据权利要求2所述的双涵道飞行器栅格舵面航向控制机构,其特征在于:所述舵机摇臂和平板舵面摇臂的转动比例在1:2到1:4。
10.一种双涵道飞行器,其特征在于:包括权利要求1-9任一项所述的双涵道飞行器栅格舵面航向控制机构。
技术总结
本发明公开了一种双涵道飞行器栅格舵面航向控制机构,包括前后两组栅格舵面,分别为前栅格舵面和后栅格舵面,前栅格舵面安装在顺时针旋转的前涵道桨叶的下方,后栅格舵面安装在逆时针旋转的后涵道桨叶的下方;前栅格舵面和后栅格舵面分别独立控制其栅格舵面的左右偏转。本发明用于双涵道飞行器的航向控制以及双涵道不对称反扭距的平衡调节,当前后双涵道舵面同时向一侧偏转时,飞行器获得侧向操控力,实现横向运动,当前后双涵道舵面相反方向偏转时,飞行器获得航向偏转力矩,实现转向运动。前后双涵道产生升力差,使飞行器获得前后平飞能力和俯仰控制能力,由此产生的不对称反扭距靠栅格舵面反向差动进行补偿。
技术研发人员:马建超,苏宝玉,康春涛,管宇锋,陈培全
受保护的技术使用者:中国电子科技集团公司第二十七研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!