一种缩比验证机可变后掠翼机构设计方法与流程
本发明设计为一种可连续变化后掠构型的机翼机构,可以实现飞机在不同飞行状态之间转换。
背景技术:
1、可变后掠翼飞机在低速飞行时机翼展开,可以获得较好的低速性能,在飞机起飞、降落和长航时飞行时可获得较大的升力;在高速飞行时机翼后掠,可降低飞行阻力,能够执行快速打击和战略侦察等任务。但在飞行过程中,翼根处需承受很大的气动力矩,为保证翼根处安全性,常在翼根连接处设计加强结构,以抵抗气动力矩变化。这样设计会使得后掠翼机构设计复杂,增大飞机整机重量,同时降低机动性能。因此,现有飞机变后掠翼机构设计使得操作麻烦、故障率较高,其复杂设计使得后掠机构往往占据机身大部分空间,限制飞机承载能力,同时影响飞机隐身性能。随着近年来技术发展,目前无人机可变后掠翼有丝杠滑块机构、滑块摇杆机构、转动导杆机构、曲柄摇杆机构等驱动形式,这些都可以实现飞行器变后掠翼。滑块机构主要问题是其同步性取决于滑块的安装精度,以及其传动形式为丝杠螺母传动,增加了机构的复杂程度。而导杆机构两侧机翼的对称性需要两侧导杆的精确控制来保证,后掠角范围取决于推杆的行程。这些驱动方式由于不易监控量化,控制精度和变化范围都不太稳定。
2、现有技术的缺点:机翼变化无法监控量化,机翼构型变化机构不稳定。
3、本发明设计为一种可连续变化后掠翼的机翼机构,主要通过电推缸的推杆结构伸缩来推动机翼绕转轴作转动动作,最终实现不同后掠角度下的机翼构型变化。其中,电推缸的控制由飞行控制系统来执行,可以保证运动过程的稳定有效。机翼转动轴内设计有角位移传感器,可以反馈机翼的前后转动角度。转动系统即为机翼的转动结构,也同时作为机翼升力的转载结构。
技术实现思路
1、本发明旨在通过飞控系统可以实现精确的机翼后掠角度控制;角位移传感器的设计可以及时反馈机翼构型状态的变化;转动系统中交叉滚子轴承的设计即保证了机翼连续变后掠过程的顺滑,也保证了机翼结构传力的稳定。
2、本发明的技术方案:
3、一种缩比验证机可变后掠翼机构设计方法,具体如下:
4、所述的缩比验证机可变后掠翼机构包括控制系统、驱动系统和转动系统;
5、所述的控制系统包括飞行控制系统和角位移传感器;所述的飞行控制系统用于发出控制指令,并作用到电推缸上;所述的角位移传感器设置在转动轴内,能够同步机翼转动的角度,并将信号反馈到飞行控制系统中。
6、所述的驱动系统包括电推缸和固定支架;所述的电推缸是机翼连续变形的作动单元,属于直线舵机一类的设备,电推缸能够通过飞控信号来进行伸缩运动,由此提供给机翼扭矩,使机翼绕转动系统进行转动运动;所述的固定支架是用于固定电推缸的结构,固定支架固定于中央翼盒上,与电推缸铰接相连,电推缸在伸缩的过程中,绕固定支架上的铰点转动。
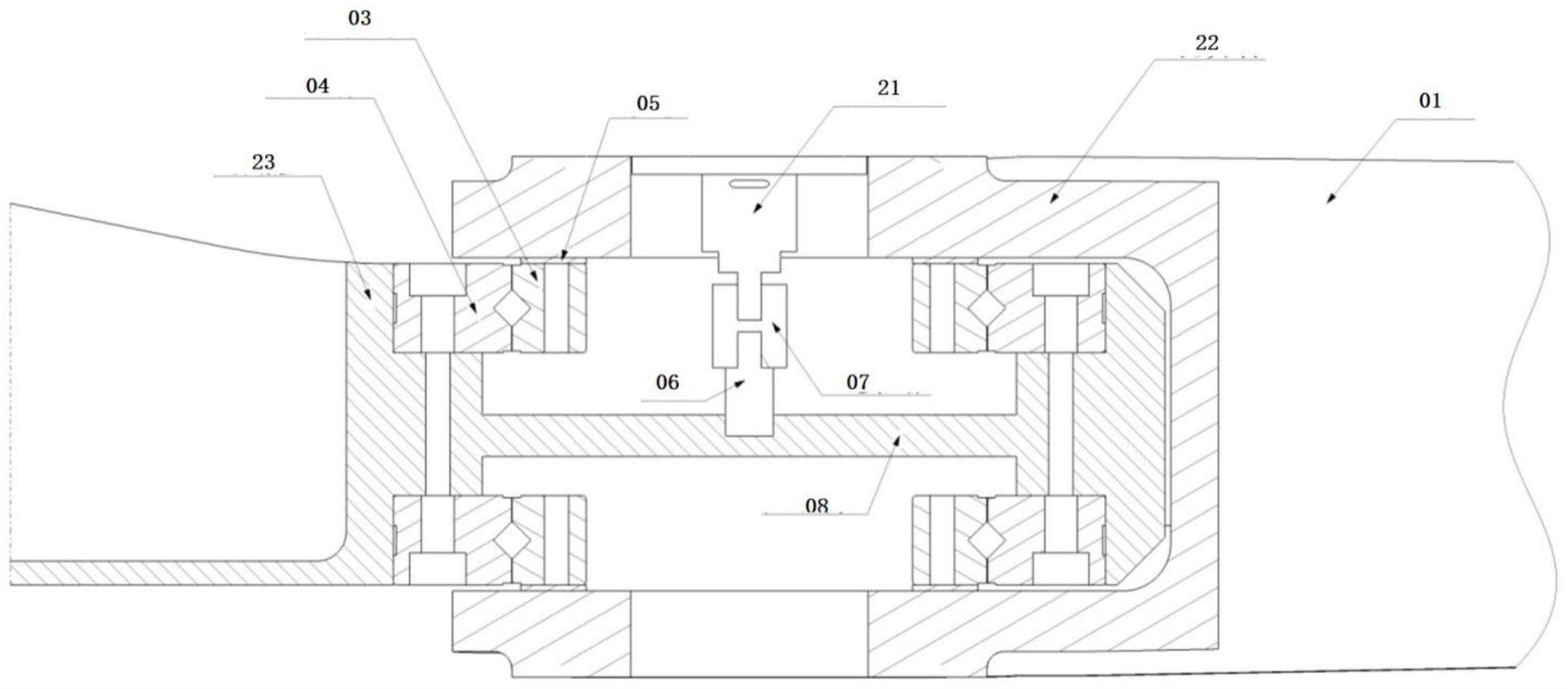
7、所述的转动系统包括交叉滚子轴承、中央翼盒固定底座和机翼转动接头;所述的交叉滚子轴承包含固定端和转动端两部分,固定端固定在中央翼盒固定底座上,转动端与机翼转动接头固定相连,交叉滚子轴承是机翼连续后掠过程中的转动重要部件,可以实现机翼的转动,同时也承担传递机翼升力的作用;所述的中央翼盒固定底座用于承载上下两组交叉滚子轴承,传递机翼升力;所述的机翼转动接头用于连接整个机翼与交叉滚子轴承,属于机翼的一部分。
8、本发明的有益效果:本发明通过飞控系统可以实现精确的机翼连续变后掠角度控制;本发明角位移传感器的设计可以及时反馈机翼连续变后掠状态的变化;转动系统中交叉滚子轴承的设计即保证了机翼连续变后掠过程的顺滑,也保证了机翼结构传力的稳定。飞机机翼状态可连续变化,并可以反馈到飞行控制系统中,整个构型变化过程飞行控制系统能做到全程监控。
技术特征:
1.一种缩比验证机可变后掠翼机构设计方法,其特征在于,具体如下:
技术总结
本发明提供一种缩比验证机可变后掠翼机构设计方法,属于飞控系统设计领域。本发明通过飞控系统可以实现精确的机翼连续变后掠角度控制;本发明角位移传感器的设计可以及时反馈机翼连续变后掠状态的变化;转动系统中交叉滚子轴承的设计即保证了机翼连续变后掠过程的顺滑,也保证了机翼结构传力的稳定。飞机机翼状态可连续变化,并可以反馈到飞行控制系统中,整个构型变化过程飞行控制系统能做到全程监控。
技术研发人员:徐亮,林鹏,黄维宁,李毅波,孙之骏,刘新民
受保护的技术使用者:沈阳飞机设计研究所扬州协同创新研究院有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!