一种室外搜救用高强度无人机的制作方法
1.本实用新型具体涉及无人机技术领域,尤其是一种室外搜救用高强度无人机。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。无人机实际上是无人驾驶飞行器的统称,从技术角度定义可以分为:无人直升机、无人固定翼机、无人多旋翼飞行器、无人飞艇、无人伞翼机这几大类。
3.目前,无人机用于室外搜救时存在供电不足意外摔落的情况,使得搜救无人机很容易出现损坏,无法继续使用,实用性较差。因此亟需一种室外搜救用高强度无人机来解决上述的问题。
技术实现要素:
4.本实用新型的目的在于克服现有技术的不足,适应现实需要,提供一种结构设计新颖的室外搜救用高强度无人机。
5.为了实现本实用新型的目的,本实用新型所采用的技术方案为:
6.一种室外搜救用高强度无人机,包括机体,所述机体外侧壁的顶部焊接有等距离呈环形结构分布的支撑臂,且支撑臂远离机体的另一端焊接有弧形块,所述弧形块远离支撑臂另一侧外壁的中心处焊接有凸块,且凸块远离弧形块的另一端开设有矩形槽,所述矩形槽的内部插接有抵持柱,且抵持柱位于矩形槽内部的一端焊接有限位板,所述限位板远离抵持柱的另一侧外壁上焊接有涡簧,且抵持柱远离凸块的另一端焊接有弧形板,所述抵持柱通过限位板和涡簧的作用滑动连接在矩形槽的内部。
7.进一步的,所述支撑臂与弧形块连接处的顶部外壁上通过螺栓安装有马达,且马达的输出端平键连接有扇叶。
8.进一步的,所述弧形板的顶部和底部均开设有弧形槽,且弧形槽的内部插接有缓冲块。
9.进一步的,所述缓冲块远离弧形板的另一端焊接有缓冲板,且缓冲板远离缓冲块的另一侧外壁上粘接有防滑垫。
10.进一步的,所述缓冲块位于弧形槽内部的一端焊接有定位板,且定位板远离缓冲块的另一侧外壁上焊接有弹簧,所述缓冲块通过定位板和弹簧的作用滑动连接在弧形槽的内部。
11.进一步的,所述弧形板远离机体的另一侧外壁上粘接有缓冲垫。
12.本实用新型的有益效果在于:
13.(1)本实用新型通过设置的弧形板,抵持柱在限位板和涡簧的作用下滑动连接在矩形槽的内部,使得弧形板具有了很好的缓冲作用,进而提升了无人机的强度和抗冲击力,同时使扇叶得到了很好的防护,结构新颖,设计合理,实用性强。
14.(2)本实用新型通过设置的缓冲板,缓冲块在定位板和弹簧的作用下滑动连接在
弧形槽的内部,使得缓冲板具有了很好的缓冲减震作用,进而提升了无人机降落时的平稳性,同时使无人机具有了很好的抗摔能力。
15.(3)本实用新型通过设置的缓冲垫,缓冲垫对弧形板起到了很好的防护作用,同时提升了弧形板的缓冲性能,弧形板围绕机体分布可对机体起到很好的防护作用,使机体具有了更好更强的防护。
附图说明
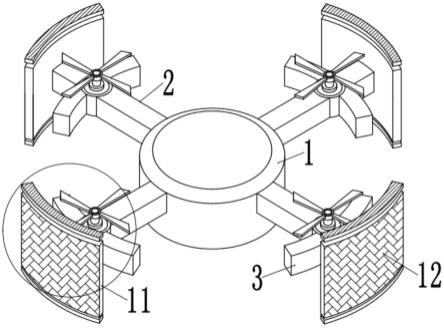
16.图1为本实用新型中的整体结构示意图;
17.图2为本实用新型中的凸块结构示意图;
18.图3为本实用新型中的局部结构示意图;
19.图4为本实用新型中的弧形板结构示意图。
20.图中:1、机体;2、支撑臂;3、弧形块;4、扇叶;5、马达;6、凸块;7、矩形槽;8、涡簧;9、限位板;10、抵持柱;11、弧形板;12、缓冲垫;13、弧形槽;14、弹簧;15、缓冲块;16、定位板;17、缓冲板;18、防滑垫。
具体实施方式
21.下面结合附图和实施例对本实用新型进一步说明:
22.参见图1至图4,本实用新型是一种室外搜救用高强度无人机,包括机体1,机体1外侧壁的顶部焊接有等距离呈环形结构分布的支撑臂2,且支撑臂2远离机体1的另一端焊接有弧形块3,弧形块3远离支撑臂2另一侧外壁的中心处焊接有凸块6,且凸块6远离弧形块3的另一端开设有矩形槽7,矩形槽7的内部插接有抵持柱10,且抵持柱10位于矩形槽7内部的一端焊接有限位板9,限位板9远离抵持柱10的另一侧外壁上焊接有涡簧8,且抵持柱10远离凸块6的另一端焊接有弧形板11,抵持柱10通过限位板9和涡簧8的作用滑动连接在矩形槽7的内部,抵持柱10在限位板9和涡簧8的作用下滑动连接在矩形槽7的内部,使得弧形板11具有了很好的缓冲作用,进而提升了无人机的强度和抗冲击力,同时使扇叶4得到了很好的防护。
23.支撑臂2与弧形块3连接处的顶部外壁上通过螺栓安装有马达5,且马达5的输出端平键连接有扇叶4。
24.弧形板11的顶部和底部均开设有弧形槽13,且弧形槽13的内部插接有缓冲块15。
25.缓冲块15远离弧形板11的另一端焊接有缓冲板17,且缓冲板17远离缓冲块15的另一侧外壁上粘接有防滑垫18,防滑垫18提升了缓冲板17与地面贴合时的稳定性,同时提升了缓冲板17的缓冲性能。
26.缓冲块15位于弧形槽13内部的一端焊接有定位板16,且定位板16远离缓冲块15的另一侧外壁上焊接有弹簧14,缓冲块15通过定位板16和弹簧14的作用滑动连接在弧形槽13的内部,缓冲块15在定位板16和弹簧14的作用下滑动连接在弧形槽13的内部,使得缓冲板17具有了很好的缓冲减震作用,进而提升了无人机降落时的平稳性,同时使无人机具有了很好的抗摔能力。
27.弧形板11远离机体1的另一侧外壁上粘接有缓冲垫12,缓冲垫12对弧形板11起到了很好的防护作用,同时提升了弧形板11的缓冲性能。
28.综上所述,本实用新型的工作原理为:该室外搜救用高强度无人机使用时,在搜救无人机出现供电不足意外摔落时,抵持柱10在限位板9和涡簧8的作用下滑动连接在矩形槽7的内部,使得弧形板11具有了很好的缓冲作用,进而提升了无人机的强度和抗冲击力,同时使扇叶4得到了很好的防护,在无人机正常降落或垂直下落时,缓冲块15在定位板16和弹簧14的作用下滑动连接在弧形槽13的内部,使得缓冲板17具有了很好的缓冲减震作用,进而提升了无人机降落时的平稳性,同时使无人机具有了很好的抗摔能力。
29.本实用新型的实施例公布的是较佳的实施例,但并不局限于此,本领域的普通技术人员,极易根据上述实施例,领会本实用新型的精神,并做出不同的引申和变化,但只要不脱离本实用新型的精神,都在本实用新型的保护范围内。
技术特征:
1.一种室外搜救用高强度无人机,包括机体(1),其特征在于,所述机体(1)外侧壁的顶部焊接有等距离呈环形结构分布的支撑臂(2),且支撑臂(2)远离机体(1)的另一端焊接有弧形块(3),所述弧形块(3)远离支撑臂(2)另一侧外壁的中心处焊接有凸块(6),且凸块(6)远离弧形块(3)的另一端开设有矩形槽(7),所述矩形槽(7)的内部插接有抵持柱(10),且抵持柱(10)位于矩形槽(7)内部的一端焊接有限位板(9),所述限位板(9)远离抵持柱(10)的另一侧外壁上焊接有涡簧(8),且抵持柱(10)远离凸块(6)的另一端焊接有弧形板(11),所述抵持柱(10)通过限位板(9)和涡簧(8)的作用滑动连接在矩形槽(7)的内部。2.如权利要求1所述的一种室外搜救用高强度无人机,其特征在于:所述支撑臂(2)与弧形块(3)连接处的顶部外壁上通过螺栓安装有马达(5),且马达(5)的输出端平键连接有扇叶(4)。3.如权利要求1所述的一种室外搜救用高强度无人机,其特征在于:所述弧形板(11)的顶部和底部均开设有弧形槽(13),且弧形槽(13)的内部插接有缓冲块(15)。4.如权利要求3所述的一种室外搜救用高强度无人机,其特征在于:所述缓冲块(15)远离弧形板(11)的另一端焊接有缓冲板(17),且缓冲板(17)远离缓冲块(15)的另一侧外壁上粘接有防滑垫(18)。5.如权利要求3所述的一种室外搜救用高强度无人机,其特征在于:所述缓冲块(15)位于弧形槽(13)内部的一端焊接有定位板(16),且定位板(16)远离缓冲块(15)的另一侧外壁上焊接有弹簧(14),所述缓冲块(15)通过定位板(16)和弹簧(14)的作用滑动连接在弧形槽(13)的内部。6.如权利要求1所述的一种室外搜救用高强度无人机,其特征在于:所述弧形板(11)远离机体(1)的另一侧外壁上粘接有缓冲垫(12)。
技术总结
本实用新型提供一种室外搜救用高强度无人机,包括机体,机体外侧壁的顶部焊接有等距离呈环形结构分布的支撑臂,且支撑臂远离机体的另一端焊接有弧形块,弧形块远离支撑臂另一侧外壁的中心处焊接有凸块,且凸块远离弧形块的另一端开设有矩形槽,矩形槽的内部插接有抵持柱。本实用新型抵持柱在限位板和涡簧的作用下滑动连接在矩形槽的内部,使得弧形板具有了很好的缓冲作用,进而提升了无人机的强度和抗冲击力,同时使扇叶得到了很好的防护,缓冲块在定位板和弹簧的作用下滑动连接在弧形槽的内部,使得缓冲板具有了很好的缓冲减震作用,进而提升了无人机降落时的平稳性,同时使无人机具有了很好的抗摔能力。机具有了很好的抗摔能力。机具有了很好的抗摔能力。
技术研发人员:陈乐春
受保护的技术使用者:数字鹰科技盐城有限公司
技术研发日:2022.05.20
技术公布日:2023/1/3
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1