一种基于无人机的探地雷达监测机器人
本技术涉及一种探地雷达监测机器人,具体为一种基于无人机的探地雷达监测机器人,属于工程勘察。
背景技术:
1、探地雷达是近几十年发展起来的一种探测地下目标的有效手段,是一种无损探测技术,与其他常规的地下探测方法相比,具有探测速度快、探测过程连续、分辨率高、操作方便灵活、探测费用低等优点,在工程勘察领域的应用日益广泛,而当需要勘察的范围较广或者人无法到达的地方时一般会将探地雷达安装在无人机上,通过操控无人机飞过待勘察的区域实现地质的勘探。
2、然而,传统的的探地雷达大多通过多个螺栓连接在无人机上,当需要对探地雷达进行检修时不便于快速的将其从无人机上拆卸下来,检修维护的效率低。
技术实现思路
1、本实用新型的目的就在于为了解决上述问题而提供一种基于无人机的探地雷达监测机器人,便于探地雷达的快速安装拆卸,缩短了探地雷达安装拆卸的时间,从而便于探地雷达的检修维护。
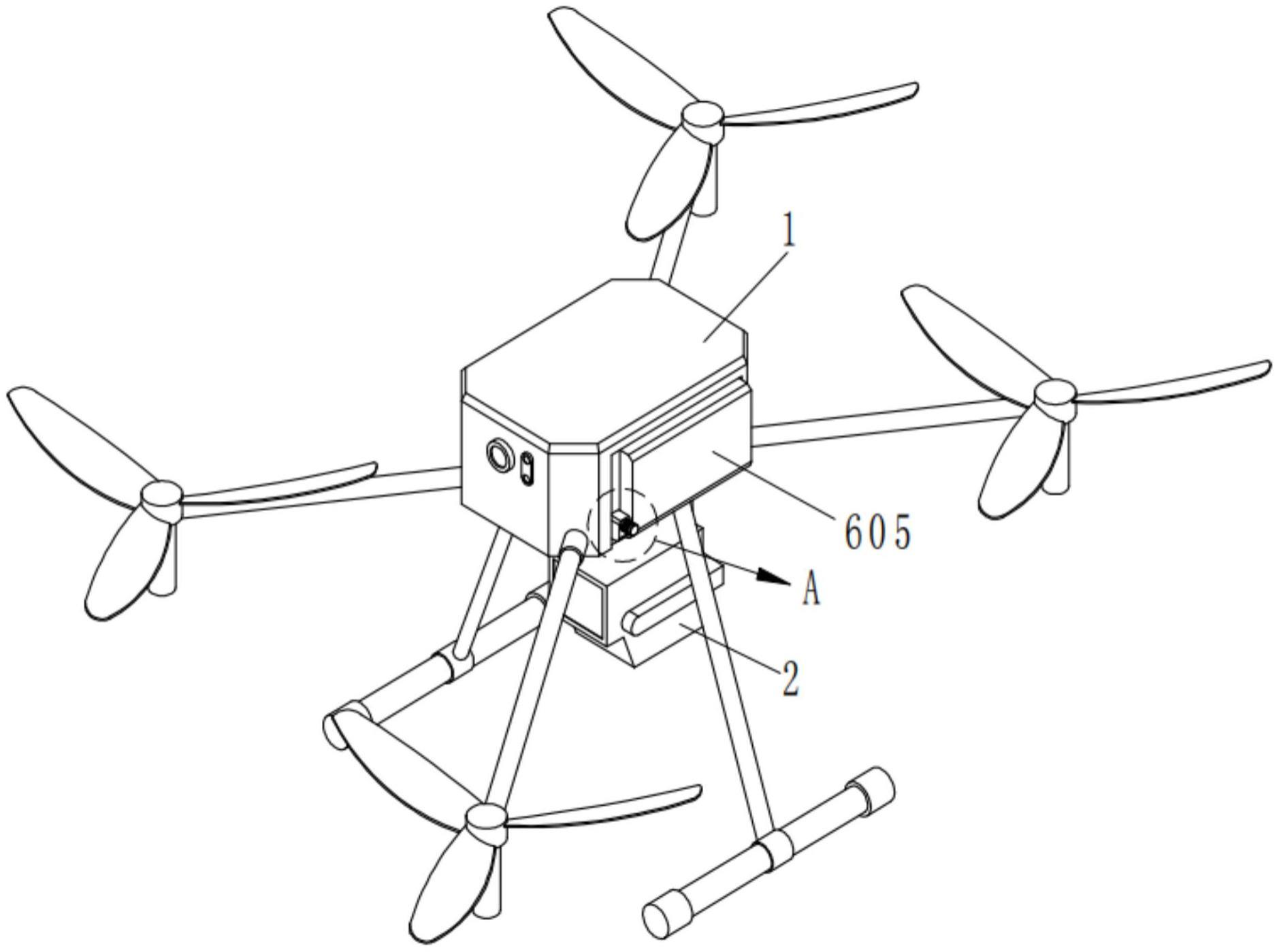
2、本实用新型通过以下技术方案来实现上述目的,一种基于无人机的探地雷达监测机器人,包括无人机本体,所述无人机本体上通过多个螺栓可拆卸连接有连接块,所述连接块上卡合有探地雷达本体,所述探地雷达本体上设有固定结构,所述固定结构包括压块,所述探地雷达本体上滑动连接有压块,所述压块固定连接于抵块,所述抵块抵触于两个卡块,所述卡块滑动连接于连接块且与探地雷达本体之间卡合,所述卡块与连接块之间抵触有第一复位弹簧,所述抵块与探地雷达本体之间连接有第二复位弹簧。
3、优选的,所述卡块截面的一端呈梯形结构,两个所述卡块关于连接块的中部呈对称分布。
4、优选的,所述抵块截面的一端呈梯形结构,所述抵块与卡块之间垂直。
5、优选的,所述压块截面的一端呈t形结构,所述连接块截面的一端呈t形结构。
6、优选的,所述连接块上设有多个安装孔,多个所述安装孔关于连接块的轴心呈圆周阵列分布。
7、优选的,所述无人机本体上设有两个翻转结构,所述翻转结构包括电机,所述无人机本体上固定连接有两个电机,所述电机的输出端通过联轴器连接有涡杆。
8、优选的,所述涡杆与涡轮啮合,所述涡轮固定连接于转轴,所述转轴转动连接于无人机本体,所述转轴上固定连接有转板。
9、优选的,所述转板上固定连接有太阳能电池板,所述转轴贯穿于转板,所述转板截面的一端呈半圆形结构。
10、本实用新型的有益效果是:无人机本体上通过多个螺栓可拆卸连接有连接块,连接块上卡合有探地雷达本体,探地雷达本体上滑动连接有压块,压块固定连接于抵块,抵块抵触于两个卡块,卡块滑动连接于连接块且与探地雷达本体之间卡合,卡块与连接块之间抵触有第一复位弹簧,抵块与探地雷达本体之间连接有第二复位弹簧,进而当需要拆卸探地雷达本体时按压压块,压块带动抵块运动,抵块抵触两个卡块背离于探地雷达本体运动,第一复位弹簧收缩,当抵块运动一段距离后背离于无人机本体拉动探地雷达本体,此时由于卡块截面的一端呈梯形结构因此探地雷达本体在运动的过程中会抵触卡块运动,继续拉动探地雷达本体直至探地雷达本体从无人机本体上脱落,进而实现了探地雷达本体的快速拆卸,当探地雷达本体发生损坏时能够快速的将其拆卸下来进行检修,提高了探地雷达本体检修维护的效率。
技术特征:
1.一种基于无人机的探地雷达监测机器人,包括无人机本体(1),其特征在于:所述无人机本体(1)上通过多个螺栓可拆卸连接有连接块(3),所述连接块(3)上卡合有探地雷达本体(2),所述探地雷达本体(2)上设有固定结构(5),所述固定结构(5)包括压块(501),所述探地雷达本体(2)上滑动连接有压块(501),所述压块(501)固定连接于抵块(502),所述抵块(502)抵触于两个卡块(503),所述卡块(503)滑动连接于连接块(3)且与探地雷达本体(2)之间卡合,所述卡块(503)与连接块(3)之间抵触有第一复位弹簧(504),所述抵块(502)与探地雷达本体(2)之间连接有第二复位弹簧(505)。
2.根据权利要求1所述的一种基于无人机的探地雷达监测机器人,其特征在于:所述卡块(503)截面的一端呈梯形结构,两个所述卡块(503)关于连接块(3)的中部呈对称分布。
3.根据权利要求1所述的一种基于无人机的探地雷达监测机器人,其特征在于:所述抵块(502)截面的一端呈梯形结构,所述抵块(502)与卡块(503)之间垂直。
4.根据权利要求3所述的一种基于无人机的探地雷达监测机器人,其特征在于:所述压块(501)截面的一端呈t形结构,所述连接块(3)截面的一端呈t形结构。
5.根据权利要求4所述的一种基于无人机的探地雷达监测机器人,其特征在于:所述连接块(3)上设有多个安装孔(4),多个所述安装孔(4)关于连接块(3)的轴心呈圆周阵列分布。
6.根据权利要求5所述的一种基于无人机的探地雷达监测机器人,其特征在于:所述无人机本体(1)上设有两个翻转结构(6),所述翻转结构(6)包括电机(601),所述无人机本体(1)上固定连接有两个电机(601),所述电机(601)的输出端通过联轴器连接有涡杆(602)。
7.根据权利要求6所述的一种基于无人机的探地雷达监测机器人,其特征在于:所述涡杆(602)与涡轮(603)啮合,所述涡轮(603)固定连接于转轴(604),所述转轴(604)转动连接于无人机本体(1),所述转轴(604)上固定连接有转板(605)。
8.根据权利要求7所述的一种基于无人机的探地雷达监测机器人,其特征在于:所述转板(605)上固定连接有太阳能电池板(7),所述转轴(604)贯穿于转板(605),所述转板(605)截面的一端呈半圆形结构。
技术总结
本技术涉及工程勘察技术领域,具体的说是一种基于无人机的探地雷达监测机器人,包括无人机本体,所述无人机本体上通过多个螺栓可拆卸连接有连接块,所述连接块上卡合有探地雷达本体,所述探地雷达本体上设有固定结构,所述固定结构包括压块,所述探地雷达本体上滑动连接有压块,所述压块固定连接于抵块,所述抵块抵触于两个卡块,所述卡块滑动连接于连接块且与探地雷达本体之间卡合,所述卡块与连接块之间抵触有第一复位弹簧,所述抵块与探地雷达本体之间连接有第二复位弹簧;便于探地雷达的快速安装拆卸,缩短了探地雷达安装拆卸的时间,从而便于探地雷达的检修维护。
技术研发人员:程乾,王翔宇
受保护的技术使用者:重庆大学溧阳智慧城市研究院
技术研发日:20220524
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!