飞行器操纵手柄及飞行器操纵组件的制作方法
本技术属于飞行器的操控领域,尤其涉及飞行器操纵手柄及飞行器操纵组件。
背景技术:
1、垂直起降固定翼飞行器在起飞阶段采用多旋翼或直升机锤击起降的方式飞行,在巡航平飞阶段采用固定翼水平飞行的方式。但固定翼飞行器和垂直起降飞行器的操控方式不同,操纵习惯也不同:例如,固定翼飞行器通常采用操纵杆和脚蹬来操控飞行器,右手杆操控飞行器姿态,左手操控杆操控飞行器油门,脚蹬操控飞行器偏航;而垂直起降的飞行器,右手杆操控飞行器前进方向,左手杆操控飞行器的飞行高度,脚蹬或左手杆来控制飞行器偏航。
2、目前,大部分中大型垂直起降固定翼飞行器为了兼容两种飞行模式,都是采用分阶段的操控方式;垂直起降阶段,飞行器通过模式开关切换到垂直飞行模式,飞行器的操控方式与垂直飞行器相同;在水平飞行阶段,飞行器通过模式开关切换到固定翼模式,飞行的操控方式与固定翼操控方式相同。由于传统的飞行员一般都在一种类型的飞行器上大量练习,其操纵习惯也针对该种类型飞行器,因此两种飞行模式的切换给飞行员带来极大的操纵负担,而且在一些应急情况下,飞行员的长期练习的下意识操纵会处理掉很多应急情况,而两种不同的模式,飞行员没办法下意识快速应急处置,操纵不当会带来灾难性后果。
技术实现思路
1、本实用新型的主要目的在于提供一种飞行器操纵手柄及飞行器操纵组件,以降低飞行员操作不当的几率。
2、为达到上述目的,本实用新型提供如下技术方案:
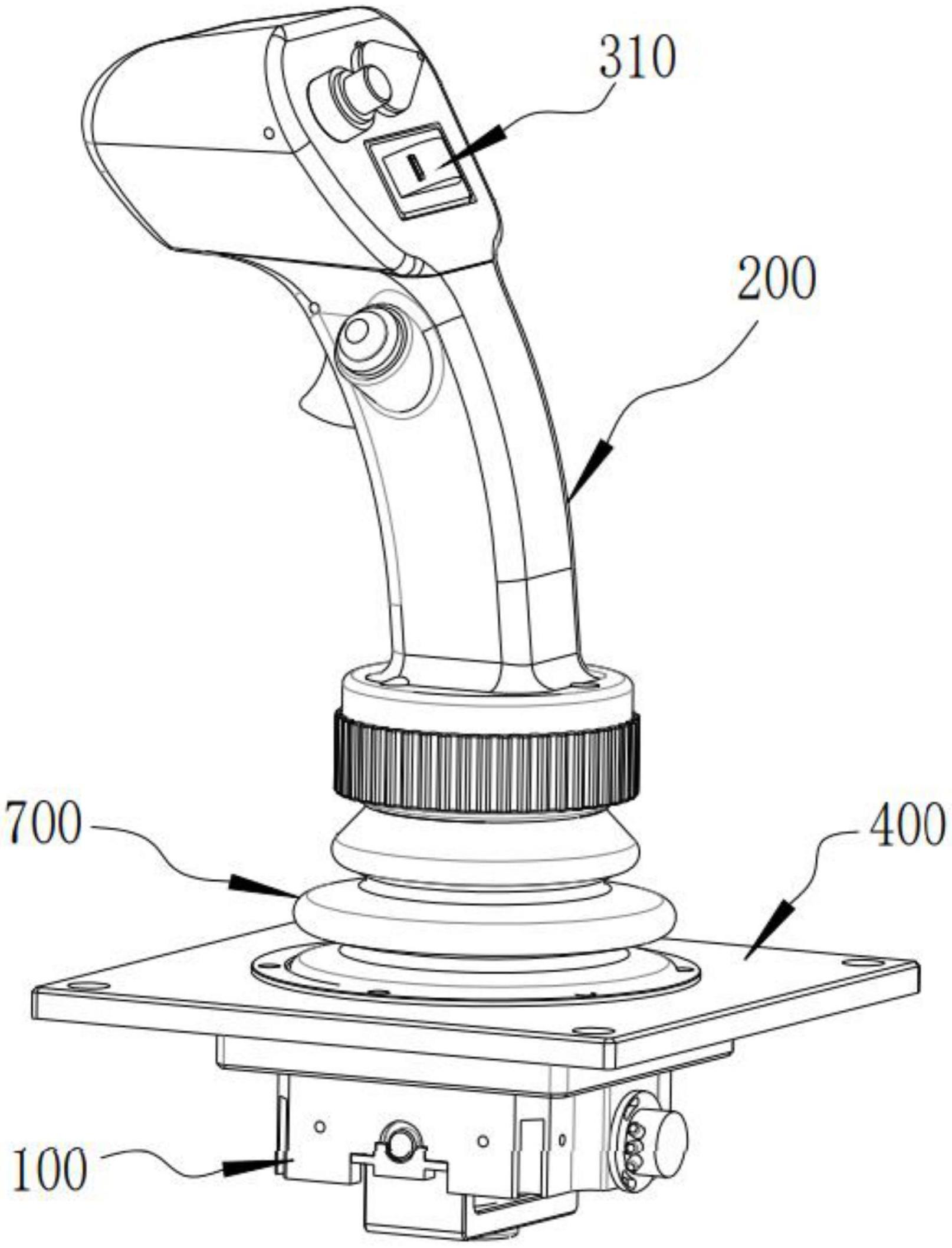
3、飞行器操纵手柄,包括:
4、基座;
5、操纵摇杆,用于控制飞行器的姿态;及
6、连接关节,连接所述基座和所述操纵摇杆,所述连接关节包括第一低副和第二低副,使所述操纵摇杆能够相对基座沿第一方向移动或转动,且所述操纵摇杆能够相对基座沿第二方向移动或转动,且所述操纵摇杆随所述第一低副移动或转动的变化量关联飞行器的滚转姿态,所述操纵摇杆随所述第二低副移动或转动的变化量关联飞行器的俯仰姿态;
7、其中,所述操纵摇杆上还设置有用于操控飞行器偏航的偏航操控结构。
8、可选的,所述偏航操控结构包括集成于所述操纵摇杆上的偏航输入元件,所述偏航输入元件具有拨动部,以所述拨动部的初始位置为基准位,所述拨动部包括沿基准位不同方向拨动的第一拨动方向和第二拨动方向;
9、其中,所述拨动部向第一拨动方向被拨动的拨动量关联飞行器的向左偏航的左偏航速度/左偏航加速度/左偏航角度,所述拨动部向所述第二拨动方向被拨动的拨动量关联飞行器向右偏航的右偏航速度/右偏航加速度/右偏航角度。
10、可选的,所述偏航输入元件为可按压可拨动的电位器,所述拨动部在按压方向上的位置包括初始位和下压位,当所述拨动部被按压至所述下压位时,所述飞行器的偏航配平清零。
11、可选的,所述第一拨动方向与所述第二拨动方向呈相反设置。
12、可选的,所述操纵摇杆包括相连接的连杆部和握持部,所述连接关节设置于所述基座和所述连杆部之间,所述握持部能够相对所述连杆部沿第三方向转动,所述握持部相对所述连杆部的转动角度关联飞行器的偏航姿态。
13、可选的,所述第三方向为所述握持部相对所述连杆部回转的方向。
14、可选的,所述握持部与所述连杆部之间设置有用于测量所述握持部与所述连杆部之间的转动角度的第一采集元件。
15、可选的,所述操纵摇杆包括相连接的握持部和连杆部,所述连接关节设置于所述基座和所述连杆部之间;
16、可选的,所述操纵摇杆还配置有第一传感器,所述第一传感器用于测量所述操纵摇杆随所述第一低副移动或转动的变化量。
17、可选的,所述操纵摇杆还配置有第二传感器,所述第二传感器用于测量所述操纵摇杆随所述第二低副移动或转动的变化量。
18、可选的,所述第一低副为横向转动副或横向移动副;
19、所述第二低副为纵向转动副或纵向移动副。
20、可选的,所述第一低副为横向转动副,所述第一低副包括第一安装孔和第一转动件,所述第一安装孔开设在所述基座上,且沿基座纵向方向延伸,所述第一转动件具有配合安装在所述第一安装孔内的第一轴段,所述第一传感器用于测量所述第一转动件在所述第一安装孔内的转动角度;
21、所述第二低副为纵向转动副,所述第二低副包括第二安装孔和第二转动件,所述第二安装孔开设在所述基座上,且沿基座横向方向延伸,所述第二转动件具有配合安装在所述第二安装孔内的第二轴段,所述第二传感器用于测量所述第二转动件在所述第二安装孔内的转动角度;
22、其中,所述第一转动件与所述操纵摇杆绕一沿横向方向延伸的轴心线转动连接,所述第二转动件与所述操纵摇杆之间具有传扭结构;或
23、所述第二转动件与所述操纵摇杆绕一沿纵向方向延伸的轴心线转动连接,所述第一转动件与所述操纵摇杆之间具有传扭结构。
24、可选的,所述传扭结构包括设置于相应转动件上的传扭槽和设置于所述操纵摇杆上的力输入部,所述力输入部配合伸入所述传扭槽内;
25、沿传扭方向,所述传扭槽的宽度与所述力输入部的宽度匹配;所述传扭槽具有垂直于所述传扭方向的长边变向,使所述力输入部能够在所述操纵摇杆的驱动下在所述传扭槽内摆动。
26、可选的,所述基座包括本体和开设于所述本体上的容纳空间;
27、所述第一转动件沿纵向方向横跨所述基座,所述第一转动件具有设置于所述容纳空间内的第一中间部位,所述第一轴段沿纵向分布在所述第一中间部位的两侧,且所述第一中间部位具有供所述力输入部贯穿的中空通槽;
28、所述第二转动件沿横向方向纵跨所述基座,所述第二转动件具有第二中间部位,所述第二轴段沿横向分布在所述第二中间部位的两侧,所述传扭槽设置于所述第二中间部位上。
29、相应的,本实用新型还提供一种飞行器操纵组件,包括左操纵手柄和右操纵手柄,在所述左操纵手柄和右操纵手柄中,其中一操纵手柄为。
30、本实用新型的飞行器操纵手柄,不仅能够操控飞行器的俯仰和滚转,还能够对飞行器的偏航进行操控,整个飞行阶段对飞行器进行俯仰、滚转和偏航的操控无需切换模式,都通过该飞行器操纵手柄进行操控,有利于避免飞行员因模式不同引起的不当操作,提高飞行安全性。
31、本实用新型的飞行器操纵组件包括该飞行器操纵手柄,也有利于减少飞行员的不当操作,提高飞行安全性。
技术特征:
1.飞行器操纵手柄,其特征在于,包括:
2.根据权利要求1所述的飞行器操纵手柄,其特征在于:所述偏航操控结构包括集成于所述操纵摇杆上的偏航输入元件,所述偏航输入元件具有拨动部,以所述拨动部的初始位置为基准位,所述拨动部包括沿基准位不同方向拨动的第一拨动方向和第二拨动方向;
3.根据权利要求2所述的飞行器操纵手柄,其特征在于:所述偏航输入元件为可按压可拨动的电位器,所述拨动部在按压方向上的位置包括初始位和下压位,当所述拨动部被按压至所述下压位时,所述飞行器的偏航配平清零。
4.根据权利要求2所述的飞行器操纵手柄,其特征在于:所述第一拨动方向与所述第二拨动方向呈相反设置。
5.根据权利要求1所述的飞行器操纵手柄,其特征在于:所述操纵摇杆包括相连接的连杆部和握持部,所述连接关节设置于所述基座和所述连杆部之间,所述握持部能够相对所述连杆部沿第三方向转动,所述握持部相对所述连杆部的转动角度关联飞行器的偏航姿态。
6.根据权利要求5所述的飞行器操纵手柄,其特征在于:所述第三方向为所述握持部相对所述连杆部回转的方向:所述握持部与所述连杆部之间设置有用于测量所述握持部与所述连杆部之间的转动角度的第一采集元件。
7.根据权利要求1所述的飞行器操纵手柄,其特征在于:所述操纵摇杆还配置有第一传感器,所述第一传感器用于测量所述操纵摇杆随所述第一低副移动或转动的变化量;所述操纵摇杆还配置有第二传感器,所述第二传感器用于测量所述操纵摇杆随所述第二低副移动或转动的变化量。
8.根据权利要求7所述的飞行器操纵手柄,其特征在于:所述第一低副为横向转动副,所述第一低副包括第一安装孔和第一转动件,所述第一安装孔开设在所述基座上,且沿基座纵向方向延伸,所述第一转动件具有配合安装在所述第一安装孔内的第一轴段,所述第一传感器用于测量所述第一转动件在所述第一安装孔内的转动角度;
9.根据权利要求8所述的飞行器操纵手柄,其特征在于:所述传扭结构包括设置于相应转动件上的传扭槽和设置于所述操纵摇杆上的力输入部,所述力输入部配合伸入所述传扭槽内;
10.根据权利要求9所述的飞行器操纵手柄,其特征在于:
11.飞行器操纵组件,其特征在于:包括左操纵手柄和右操纵手柄,在所述左操纵手柄和右操纵手柄中,其中一操纵手柄为权利要求1-10中任一项所述的飞行器操纵手柄。
技术总结
本技术公开了一种飞行器操纵手柄及飞行器操纵组件,该飞行器操纵手柄包括:基座;操纵摇杆,用于控制飞行器的姿态;及连接关节,连接基座和操纵摇杆,连接关节包括第一低副和第二低副,使操纵摇杆能够相对基座沿第一方向移动或转动,且操纵摇杆能够相对基座沿第二方向移动或转动,且操纵摇杆随第一低副移动或转动的变化量关联飞行器的滚转姿态,操纵摇杆随第二低副移动或转动的变化量关联飞行器的俯仰姿态;操纵摇杆上还设置有用于操控飞行器偏航的偏航操控结构。本技术,在整个飞行阶段都通过本技术的飞行器操控手柄操控飞行器的俯仰、滚转和偏航,无需切换模式,有利于避免飞行员因模式不同引起的不当操作,提高飞行安全性。
技术研发人员:薛松柏,徐大勇,郭亮
受保护的技术使用者:成都沃飞天驭科技有限公司
技术研发日:20220927
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!