一种无人机智能换电机构的制作方法
本技术主要涉及无人机换电,具体的说是一种无人机智能换电机构。
背景技术:
1、目前市面上的无人机多需要通过手动方式来进行电池更换,以延续飞行时间,但这种方式大大降低了无人机的作业效率。因此已发展出采用工业机器人或者复杂的机械模组来实现换电的技术方案,如公开号cn216186134u的中国专利申请即公开了一种无人机的换电装置,但该装置体积庞大、结构复杂,且换电步骤多、模组运动路径长,因此导致其使用成本高、维护困难,使用场合有限。
技术实现思路
1、为了弥补现有技术的不足,本实用新型提供了一种无人机智能换电机构,其结构设计简单、换电步骤少,可大幅提高无人机电池换电效率。
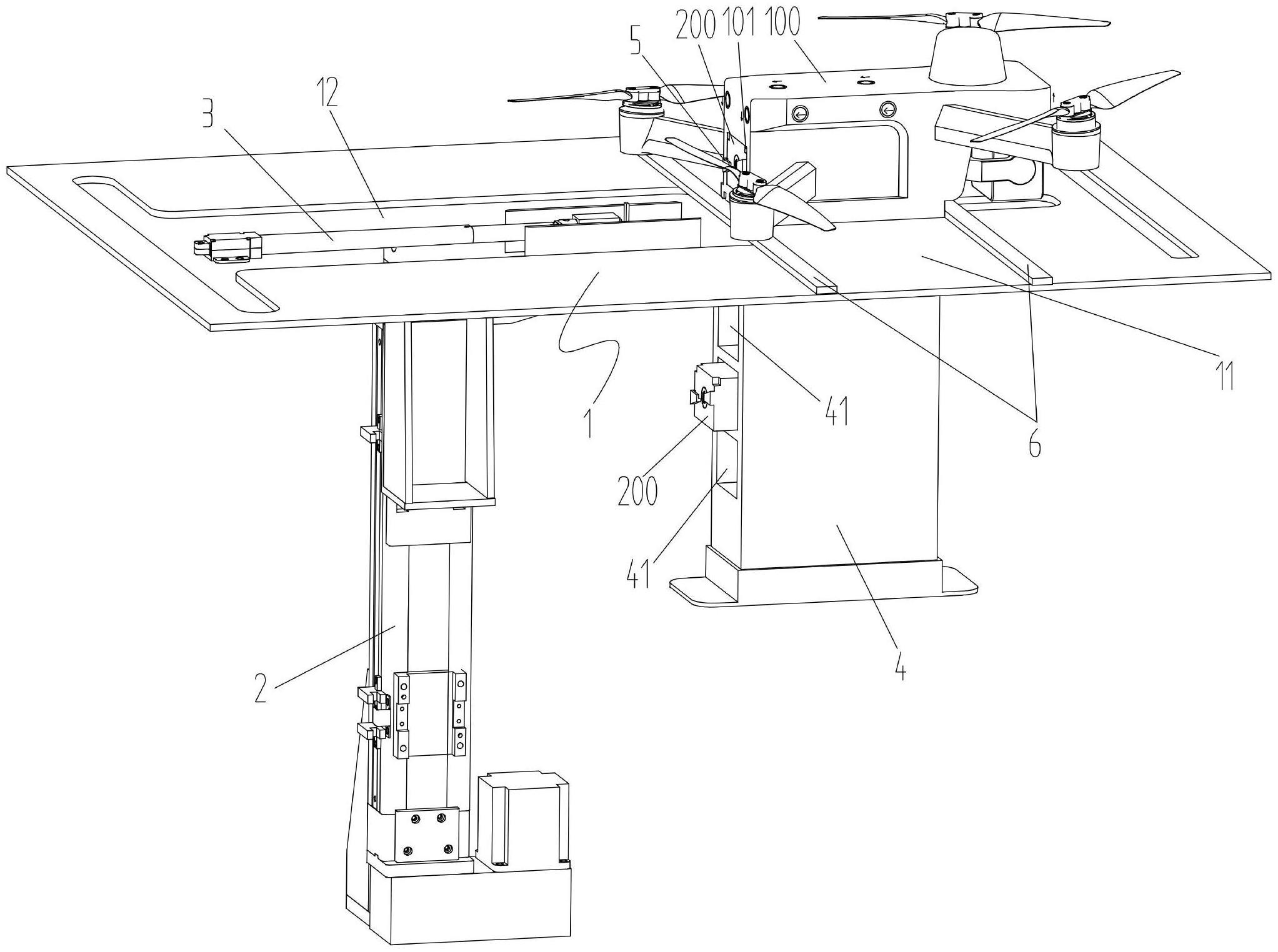
2、为此,本申请提供了一种无人机智能换电机构,其包括:
3、停机平台,且所述停机平台上设置有用于停放无人机的停机区域;
4、z向移动模组、换电模组,所述换电模组连接所述z向移动模组,并在所述z向移动模组的驱动下在z向进行移动;所述换电模组用于可分离的连接电池;
5、电池连接件,其连接所述电池;
6、以及充电仓,其用于容纳若干电池,且对电池进行充电;
7、所述换电模组通过电池连接件连接安装于无人机电池安装空间内的电池,并带动该电池完全脱离所述电池安装空间;
8、以及,所述换电模组通过电池连接件连接充电仓内的、已完成充电的电池,并将已完成充电的电池安装于无人机的电池安装空间内。
9、优选的,所述电池连接件上开设有与所述换电模组卡接的卡槽。
10、优选的,所述换电模组包括:
11、滑座,其连接所述z向移动模组,并在所述z向移动模组的驱动下在z向进行移动;
12、推杆、直线驱动件,所述直线驱动件连接所述推杆;
13、转动驱动件,其连接所述推杆的端部;
14、转动块,其连接所述转动驱动件的转动动力输出端;
15、托架,其位于所述转动块下方,用于承托电池;
16、所述直线驱动件驱动推杆、转动块朝向/远离停放在所述停机区域的无人机直线运动或,朝向/远离所述充电仓直线运动;
17、所述转动驱动件驱动所述转动块沿第一方向转动,使得所述转动块进入卡槽内,以实现转动块与电池连接件的卡接,或,驱动所述转动块沿第二方向转动,使得所述转动块从卡槽内脱出,以解除转动块与电池连接件的卡接。
18、优选的,所述换电模组还包括:挡板,其连接所述托架的一侧/两侧,用于防止托架承托的电池掉落以及对电池进行定位。
19、优选的,所述转动驱动件包括电机。
20、优选的,所述托架整体为板状结构。
21、优选的,所述充电仓具有若干个在z向依次排列设置的充电舱室,且每一充电舱室均对应容纳一个电池。
22、优选的,所述无人机智能换电机构还包括:归中机构,其安装在所述停机平台上,用于将停放在所述停机区域的无人机移动至预定位置。
23、优选的,所述停机平台上开设有供所述换电模组部分/全部穿过的槽口。
24、优选的,当无人机停放在所述停机区域时,无人机电池安装空间的开口朝向所述槽口,以暴露安装于电池安装空间内的电池的局部,且该局部连接所述电池连接件。
25、本实用新型中的无人机电池换电机构结构设置简单、体积小,仅需要通过简单的z向、x向抽拉运动即可完成电池换电作业,由此大幅提高换电作业效率。
技术特征:
1.一种无人机智能换电机构,其特征在于,包括:
2.如权利要求1所述的无人机智能换电机构,其特征在于,所述电池连接件上开设有与所述换电模组卡接的卡槽。
3.如权利要求2所述的无人机智能换电机构,其特征在于,所述换电模组包括:
4.如权利要求3所述的无人机智能换电机构,其特征在于,所述换电模组还包括:
5.如权利要求3所述的无人机智能换电机构,其特征在于,所述转动驱动件包括电机。
6.如权利要求3所述的无人机智能换电机构,其特征在于,所述托架整体为板状结构。
7.如权利要求1所述的无人机智能换电机构,其特征在于,所述充电仓具有若干个在z向依次排列设置的充电舱室,且每一充电舱室均对应容纳一个电池。
8.如权利要求1所述的无人机智能换电机构,其特征在于,当无人机停放在所述停机区域时,无人机电池安装空间的开口朝向所述槽口,以暴露安装于电池安装空间内的电池的局部,且该局部连接所述电池连接件。
技术总结
本技术主要涉及一种无人机智能换电机构,其包括:停机平台,且所述停机平台上设置有用于停放无人机的停机区域;Z向移动模组、换电模组,所述换电模组连接所述Z向移动模组,并在所述Z向移动模组的驱动下在Z向进行移动;所述换电模组用于可分离的连接电池;电池连接件,其连接所述电池;以及充电仓,其用于容纳若干电池,且对电池进行充电。本申请其结构设计简单、换电步骤少,可大幅提高无人机电池换电效率。
技术研发人员:黄立,何志武,李佳,薛源,刘华斌,刘寿宝
受保护的技术使用者:普宙科技有限公司
技术研发日:20221121
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!