一种路空两栖无人机
本技术涉及一种路空两栖无人机,属于无人机。
背景技术:
1、四旋翼无人机广泛应用与航拍、快递运送、巡检、农业、娱乐等领域。但传统的四旋翼无人机运动模式单一,仅仅局限于空中飞行,续航时间短。在很多实际场景应用中并不需要无人机一直飞在空中,无人机电量的消耗也主要在于无人机的飞行途中,而真正应用于实际执行任务消耗的可用电量却很少了。另一方面,单一的飞行模式在执行任务中会存在一些限制。比如,在城市搜救场景中,传统的四旋翼无人机仅仅能够飞临被搜救场景的上方来取得航拍数据,很难进入到一些狭窄的空间或者进入室内进行侦测,所以更需要的是一种飞行与陆地行驶相结合的机器人系统。
2、现有专利cn114701307a一种一体式两栖无人机公开了通过在无人机上加装了轮子来实现路面的运动,地形通过能力弱,并且在地面状态下,横向面积大,运动不灵活且不能通过一些狭小的区域。
3、现有专利cn108583181b可变形陆空两栖无人机公开了变形后采用滚动行驶方式,在陀螺力矩的作用下保持动态平衡,但是通过滚动的方式行走不易定位到预定位置并且稳定性差,通过路障的能力差。
技术实现思路
1、本实用新型所要解决的技术问题是提供一种路空两栖无人机,具有空中和陆地移动的能力,并且在陆地移动更加灵活,越障能力强。
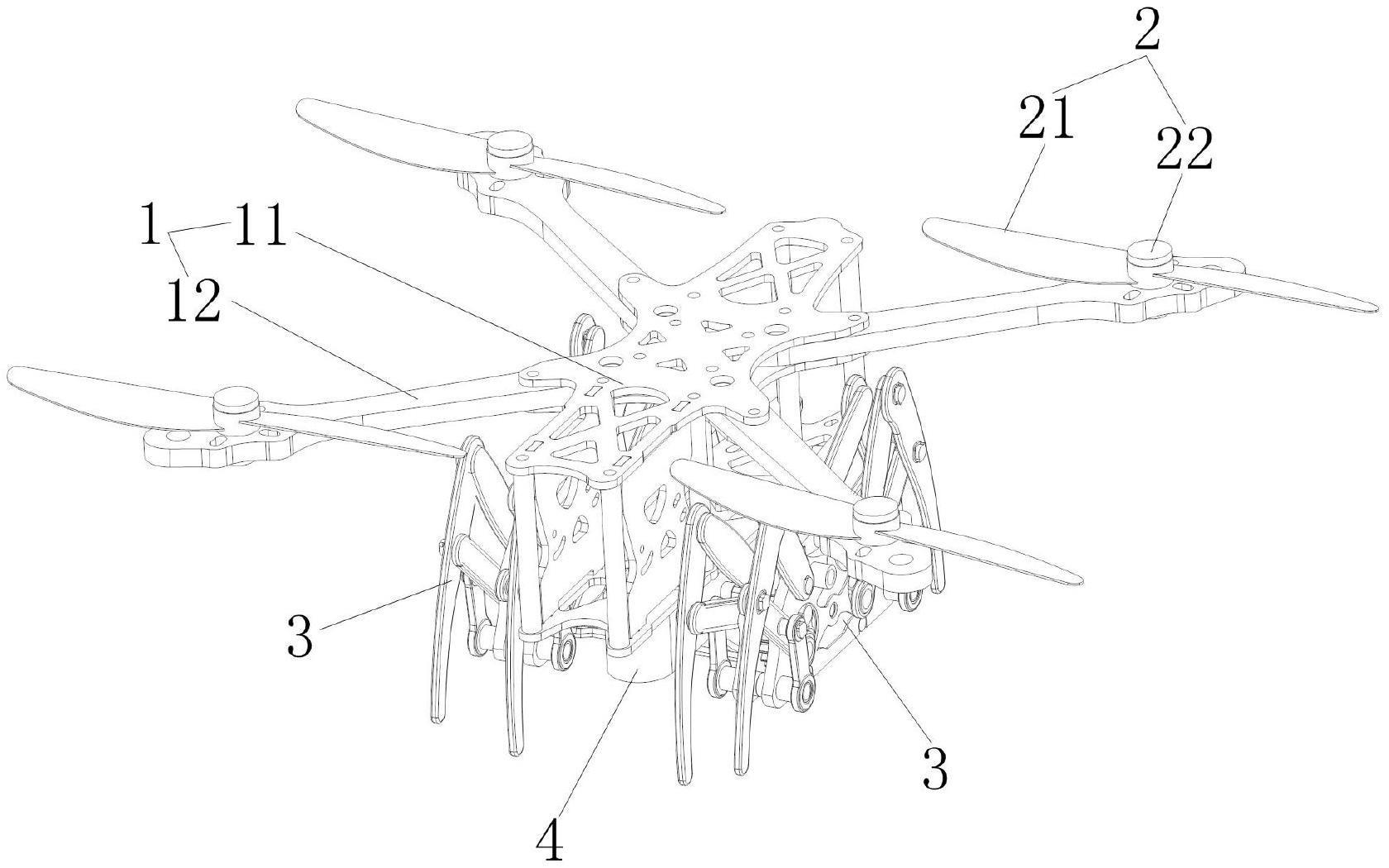
2、本实用新型解决上述技术问题的技术方案如下:一种路空两栖无人机,包括机架、多个飞行机构、两个爬行机构和安装壳,多个所述飞行机构安装在所述机架顶部,两个所述爬行机构对称安装在所述机架两侧,所述安装壳固定在所述机架底部;所述爬行机构包括支撑架、驱动电机、齿轮组件、多个连杆组件及对应连接在多个所述连杆组件上的多个爬行爪,所述支撑架固定在所述机架的侧部,所述齿轮组件转动连接在所述支撑架上,所述驱动电机固定在所述安装壳内且其输出轴通过传动组件与所述齿轮组件传动连接;所述连杆组件包括驱动杆、连接杆和支撑杆,所述驱动杆的连接端通过连接件与所述齿轮组件铰接,其驱动端与所述爬行爪的抓身铰接以驱动所述爬行爪沿前后方向摆动;所述连接杆的转动端与所述支撑架的上端铰接,其铰接端与所述爬行爪的连接端铰接,所述支撑杆的转动端与所述支撑架的下端铰接,其铰接端与所述驱动杆的杆身铰接以使所述爬行爪的爬行端向前移动时远离地面,向后移动时压紧地面以获得向前移动的摩擦力。
3、本实用新型的有益效果是:飞行机构安装在支架上,为整个设备提供飞行动力;爬行机构安装在机架上,为陆地移动提供动力;驱动电机通过传动组件驱动齿轮组件转动,齿轮组件驱动驱动杆作往返运动,驱动杆带动爬行爪做往返运动,但是爬行爪的连接端与连接杆的铰接端铰接,连接杆的连接端与支撑架铰接,根据杠杆原理,使得爬行爪的爬行端在前后方向做往复运动;支撑杆两端分别与支撑架和驱动杆的杆身铰接,使得爬行爪的爬行端在上下方向上做往复运动,前后方向的往复运动和上下方向的往复运动使得爬行爪的爬行端向前移动时远离地面,向后移动时压紧地面以获得向前移动的摩擦力,带动整个设备移动。
4、在上述技术方案的基础上,本实用新型还可以做如下改进。
5、进一步,所述支撑架包括两个支撑侧板和多个连接柱,两个所述支撑侧板间隔布置形成安装间隙,多个所述连接柱位于所述安装间隙内且其两端分别固定在两个所述支撑侧板上,所述齿轮组件安装在所述安装间隙内;所述连杆组件和所述爬行爪均为四个,四个所述连接杆的转动端对称铰接在两个所述支撑侧板的外侧顶部,四个所述支撑杆的转动端对称铰接在两个所述支撑侧板的外侧底部,四个所述驱动杆的连接端通过连接件铰接在所述齿轮组件上以驱动四个所述爬行爪爬行。
6、采用上述进一步方案的有益效果:齿轮组件安装在安装间隙内,两侧的支撑侧板能够对齿轮组件进行保护,并且方便连接两个支撑侧板外侧的连杆组件;四个连杆组件通过齿轮组件驱动四个爬行爪,提高爬行的稳定性和连贯性。
7、进一步,所述齿轮组件包括转动连接在支撑侧板上的主齿轮和两个从动齿轮,所述主齿轮通过所述传动组件与所述驱动电机的输出轴传动连接,两个所述从动齿轮位于所述主齿轮两侧并与其啮合,两个所述从动齿轮的轮盘上均开设有等角度间隔布置的四个连接孔;位于所述从动齿轮两侧的两个所述驱动杆的连接端通过连接件分别与间隔布置的两个所述连接孔铰接,位于所述支撑侧板同侧的两个所述驱动杆的连接端分别与两个所述从动齿轮上相同位置的连接孔铰接。
8、采用上述进一步方案的有益效果:驱动电机通过传动组件驱动主齿轮转动,主齿轮带动两侧的从动齿轮转动,两侧的从动齿轮转动的方向相反,位于一个从动齿轮两侧的驱动杆的连接端分别连接在间隔布置的两个连接孔内,能够使得两侧的爬行爪的运动轨迹相反;位于支撑侧板同侧的两个驱动杆的连接端分别与两个从动齿轮上相同位置的连接孔转动连接,使得同侧的两个爬行爪的运行轨迹相同;两个爬行机构对称安装在所述机架两侧,使得四个爬行爪的爬行端向前移动时远离地面,另外四个爬行爪向后移动时压紧地面以获得向前移动的摩擦力,带动整个设备移动,提高移动的稳定性和连贯性。
9、进一步,所述连接件包括连接轴和轴承,多个所述驱动杆的连接端开设有安装孔,所述轴承的外圈固定在所述安装孔内,所述连接轴的一端与所述轴承的内圈固定连接,另一端与对应的所述连接孔固定连接。
10、采用上述进一步方案的有益效果:通过连接轴和轴承结构使驱动杆转动连接在连接孔内,结构简单,安装方便。
11、进一步,所述传动组件包括传动轴、第一传动齿轮和第二传动齿轮,所述第一传动齿轮安装在所述驱动电机的输出轴上,所述传动轴贯穿所述安装壳且两端与两侧的所述主齿轮固定连接,所述第二传动齿轮固定在所述传动轴上,所述第一传动齿轮与所述第二传动齿轮通过齿轮组传动连接。
12、进一步,所述传动轴为六方轴。
13、采用上述进一步方案的有益效果:六方轴与第二传动齿轮固定更加不方便。
14、进一步,所述机架包括支撑框和四个对称固定连接在所述支撑框上的连接臂,所述飞行机构为四个且对应安装在四个所述连接臂远离所述支撑框的一端。
15、采用上述进一步方案的有益效果:支撑框质量更轻;四个连接臂方便安装飞行机构。
16、进一步,所述飞行机构包括旋翼和飞行电机,所述飞行电机固定在所述连接臂上,所述旋翼安装在所述飞行电机的输出轴上。
17、进一步,所述支撑框和所述连接臂均为碳纤维材料。
18、采用上述进一步方案的有益效果:碳纤维材料质量轻,强度大,适合飞行。
技术特征:
1.一种路空两栖无人机,其特征在于,包括机架(1)、多个飞行机构(2)、两个爬行机构(3)和安装壳(4),多个所述飞行机构(2)安装在所述机架(1)顶部,两个所述爬行机构(3)对称安装在所述机架(1)两侧,所述安装壳(4)固定在所述机架(1)底部;
2.根据权利要求1所述的一种路空两栖无人机,其特征在于,所述支撑架(31)包括两个支撑侧板(311)和多个连接柱(312),两个所述支撑侧板(311)间隔布置形成安装间隙(313),多个所述连接柱(312)位于所述安装间隙(313)内且其两端分别固定在两个所述支撑侧板(311)上,所述齿轮组件(33)安装在所述安装间隙(313)内;
3.根据权利要求2所述的一种路空两栖无人机,其特征在于,所述齿轮组件(33)包括转动连接在支撑侧板(311)上的主齿轮(331)和两个从动齿轮(332),所述主齿轮(331)通过所述传动组件(5)与所述驱动电机(32)的输出轴传动连接,两个所述从动齿轮(332)位于所述主齿轮(331)两侧并与其啮合,两个所述从动齿轮(332)的轮盘上均开设有等角度间隔布置的四个连接孔(6);位于所述从动齿轮(332)两侧的两个所述驱动杆(341)的连接端通过连接件分别与间隔布置的两个所述连接孔(6)铰接,位于所述支撑侧板(311)同侧的两个所述驱动杆(341)的连接端分别与两个所述从动齿轮(332)上相同位置的连接孔(6)铰接。
4.根据权利要求3所述的一种路空两栖无人机,其特征在于,所述连接件包括连接轴和轴承,多个所述驱动杆(341)的连接端开设有安装孔,所述轴承的外圈固定在所述安装孔内,所述连接轴的一端与所述轴承的内圈固定连接,另一端与对应的所述连接孔(6)固定连接。
5.根据权利要求3所述的一种路空两栖无人机,其特征在于,所述传动组件(5)包括传动轴(51)、第一传动齿轮(52)和第二传动齿轮(53),所述第一传动齿轮(52)安装在所述驱动电机(32)的输出轴上,所述传动轴(51)贯穿所述安装壳(4)且两端与两侧的所述主齿轮(331)固定连接,所述第二传动齿轮(53)固定在所述传动轴(51)上,所述第一传动齿轮(52)与所述第二传动齿轮(53)啮合。
6.根据权利要求5所述的一种路空两栖无人机,其特征在于,所述传动轴(51)为六方轴。
7.根据权利要求1所述的一种路空两栖无人机,其特征在于,所述机架(1)包括支撑框(11)和四个对称固定连接在所述支撑框(11)上的连接臂(12),所述飞行机构(2)为四个且对应安装在四个所述连接臂(12)远离所述支撑框(11)的一端。
8.根据权利要求7所述的一种路空两栖无人机,其特征在于,所述飞行机构(2)包括旋翼(21)和飞行电机(22),所述飞行电机(22)固定在所述连接臂(12)上,所述旋翼(21)安装在所述飞行电机(22)的输出轴上。
9.根据权利要求8所述的一种路空两栖无人机,其特征在于,所述支撑框(11)和所述连接臂(12)均为碳纤维材料。
技术总结
本技术提供的一种路空两栖无人机,包括机架、多个飞行机构、两个爬行机构和安装壳,爬行机构包括支撑架、驱动电机、齿轮组件、多个连杆组件及多个爬行爪,连杆组件包括驱动杆、连接杆和支撑杆,驱动杆的连接端与齿轮组件铰接,其驱动端与爬行爪的抓身铰接;连接杆的转动端与支撑架的上端铰接,其铰接端与爬行爪的连接端铰接,支撑杆的转动端与支撑架的下端铰接,其铰接端与驱动杆的杆身铰接以使爬行爪的爬行端向前移动时远离地面,向后移动时压紧地面以获得向前移动的摩擦力,本技术提供的一种路空两栖无人机,属于无人机技术领域,具有空中和陆地移动的能力,并且在陆地移动更加灵活,越障能力强。
技术研发人员:颜廷豹,赵福林,林博臻,贾昊洋,陈博
受保护的技术使用者:东北电力大学
技术研发日:20221227
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!