一种角动量自守恒机构以及卫星
本发明涉及航天,具体涉及一种角动量自守恒机构以及卫星。
背景技术:
1、人造卫星在进行对地观测或是目标扫描等作业时,成像装置需要进行往复摆动实现连续成像,例如为实现对地目标的宽幅连续成像,需要成像装置进行大角度快速往复摆动。其中一种常见摆动方式是将成像装置作为载荷连接于卫星本体上,由载荷摆动机构来实现装置的往复摆动。
2、现有的大惯量载荷摆动机构大多采用电机驱动转盘转动,进而带动载荷进行往复摆动,在载荷摆动的过程中由动量轮系统实现卫星的整体平衡,但动量轮的长期加减速启停容易对动量轮系统造成损伤,影响动量轮系统的使用寿命,不利于卫星的长期运行。
技术实现思路
1、本发明的一个目的是提供一种角动量自守恒机构,能够在卫星载荷摆动的过程中实现角动量自守恒。
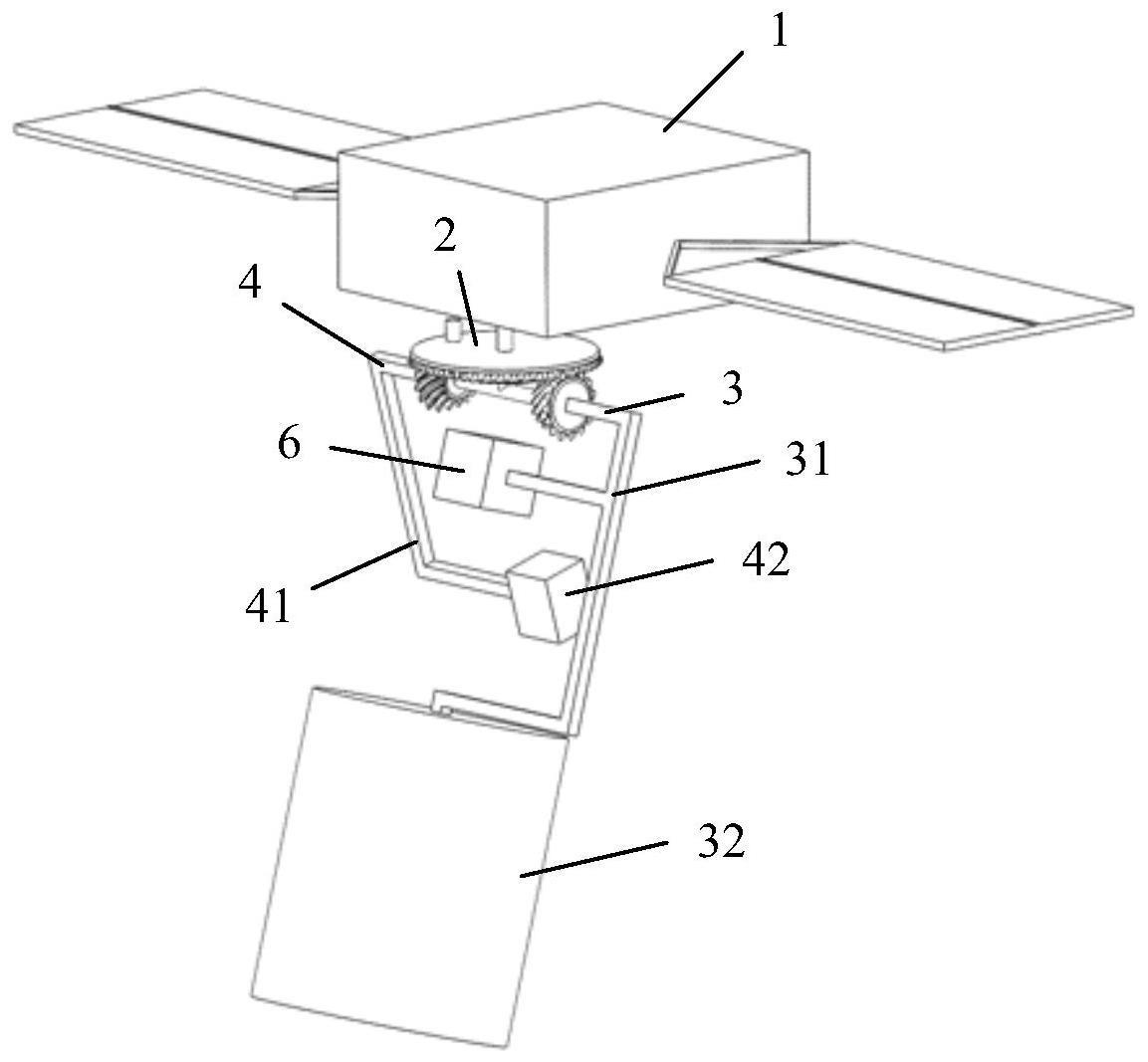
2、上述角动量自守恒机构用于卫星,所述卫星包括卫星本体、载荷以及角动量自守恒机构,所述载荷通过所述角动量自守恒机构连接于所述卫星本体上,使所述载荷相对所述卫星本体可摆动,所述角动量自守恒机构包括:
3、转盘,可转动的设置在所述卫星本体部上;
4、第一摆动机构,包括第一传动组件以及第一摆动件,所述第一摆动件通过所述第一传动组件与所述转盘传动连接;
5、第二摆动机构,包括第二传动组件以及第二摆动件,所述第二摆动件通过所述第二传动组件与所述转盘传动连接;以及
6、驱动机构,用于驱动所述转盘转动;
7、其中,所述驱动机构驱动所述转盘进行转动,所述转盘分别通过所述第一传动组件与所述第二传动组件带动所述第一摆动件与所述第二摆动件朝向彼此相反的方向摆动,以使所述第一摆动机构与所述第二摆动机构的转动惯量相互抵消;
8、所述第一摆动件与所述第二摆动件中的一方为所述载荷。
9、在一个或多个实施方式中,所述第一摆动机构与所述第二摆动机构的质量相等,在初始状态下,所述第一摆动机构与所述第二摆动机构的重心位置一致且位于所述转盘的转动中心线上;在工作状态下,所述第一摆动机构与所述第二摆动机构的重心位置与所述转盘的转动中心之间的距离始终一致。
10、在一个或多个实施方式中,所述第一摆动件与所述第二摆动件中的另一方为平衡块。
11、在一个或多个实施方式中,所述转盘上设置有齿轮部,所述第一传动组件包括第一齿轮以及第一摆臂,所述第一齿轮设置在所述第一摆臂的一端,用于与所述齿轮部配合实现传动连接,所述第一摆动件设置于所述第一摆臂的另一端;
12、所述第二传动组件包括第二齿轮以及第二摆臂,所述第二齿轮设置在所述第二摆臂的一端,用于与所述齿轮部配合实现传动连接,所述第二摆动件设置于所述第二摆臂的另一端;
13、其中,所述齿轮部呈圆形,所述第一齿轮与所述第二齿轮连接于所述转盘直径方向上的两端。
14、在一个或多个实施方式中,所述第一传动件与所述第二传动件采用锥形齿轮。
15、在一个或多个实施方式中,所述第一摆动件为所述载荷,所述第一摆动机构还包括第三摆动件,所述第三摆动件设置于所述第一摆臂上,以随所述载荷同步摆动;
16、其中,所述第一摆动件位于所述第二摆动件靠近所述转盘的一侧,所述第三摆动件位于所述第二摆动件远离所述转盘的另一侧。
17、在一个或多个实施方式中,所述角动量自守恒机构还包括控制系统,通过所述控制系统控制所述载荷的摆动角度以及摆动频率。
18、在一个或多个实施方式中,所述载荷为成像装置。
19、本发明的另一个目的是提供一种卫星,能够在卫星载荷摆动的过程中实现角动量自守恒。
20、上述卫星包括卫星本体、载荷以及上述的角动量自守恒机构,所述载荷通过所述角动量自守恒机构连接于所述卫星本体上,使所述载荷相对所述卫星本体可摆动。
21、本申请与现有技术相比至少具有以下有益效果:
22、上述角动量自守恒机构中第一摆动机构与第二摆动机构的运动方向始终相反,通过转盘的转动可驱使第一摆动件与第二摆动件同步反向摆动,在初始状态下,第一摆动机构与第二摆动机构的质量相等,重心位置一致且位于转盘的转动中心线上,从而能够在载荷进行摆动作业的过程中,由第一摆动机构或第二摆动机构来抵消载荷的转动惯量,实现卫星的角动量自守恒,确保在载荷摆动作业的过程中卫星本体始终保持平衡。
技术特征:
1.一种角动量自守恒机构,用于卫星,其特征在于,所述卫星包括卫星本体、载荷以及角动量自守恒机构,所述载荷通过所述角动量自守恒机构连接于所述卫星本体上,使所述载荷相对所述卫星本体可摆动,所述角动量自守恒机构包括:
2.如权利要求1所述的角动量自守恒机构,其特征在于,所述第一摆动机构与所述第二摆动机构的质量相等,在初始状态下,所述第一摆动机构与所述第二摆动机构的重心位置一致且位于所述转盘的转动中心线上;在工作状态下,所述第一摆动机构与所述第二摆动机构的重心位置与所述转盘的转动中心之间的距离始终一致。
3.如权利要求1所述的角动量自守恒机构,其特征在于,所述第一摆动件与所述第二摆动件中的另一方为平衡块。
4.如权利要求1所述的角动量自守恒机构,其特征在于,所述转盘上设置有齿轮部,所述第一传动组件包括第一齿轮以及第一摆臂,所述第一齿轮设置在所述第一摆臂的一端,用于与所述齿轮部配合实现传动连接,所述第一摆动件设置于所述第一摆臂的另一端;
5.如权利要求4所述的角动量自守恒机构,其特征在于,所述第一传动件与所述第二传动件采用锥形齿轮。
6.如权利要求4所述的角动量自守恒机构,其特征在于,所述第一摆动件为所述载荷,所述第一摆动机构还包括第三摆动件,所述第三摆动件设置于所述第一摆臂上,以随所述载荷同步摆动;
7.如权利要求1所述的角动量自守恒机构,其特征在于,所述角动量自守恒机构还包括控制系统,通过所述控制系统控制所述载荷的摆动角度以及摆动频率。
8.如权利要求1所述的角动量自守恒机构,其特征在于,所述载荷为成像装置。
9.一种卫星,其特征在于,包括卫星本体、载荷以及如权利要求1至8中任一项所述的角动量自守恒机构,所述载荷通过所述角动量自守恒机构连接于所述卫星本体上,使所述载荷相对所述卫星本体可摆动。
技术总结
一种角动量自守恒机构,用于卫星,卫星包括卫星本体、载荷以及角动量自守恒机构,载荷通过角动量自守恒机构连卫星本体上。角动量自守恒机构包括:转盘、第一摆动机构、第二摆动机构以及驱动机构,转盘可转动的设置在卫星本体部上,第一摆动机构包括第一传动组件以及第一摆动件,第一摆动件通过第一传动组件与转盘传动连接,第二摆动机构包括第二传动组件以及第二摆动件,第二摆动件通过第二传动组件与转盘传动连接。驱动机构驱动转盘转动,转盘分别通过第一传动组件与第二传动组件带动第一摆动件与第二摆动件朝向彼此相反的方向摆动,以使第一摆动机构第二摆动机构的转动惯量相互抵消,第一摆动件与第二摆动件中的一方为载荷。还提供一种卫星。
技术研发人员:郭崇滨,高宝光,尹增山
受保护的技术使用者:中国科学院微小卫星创新研究院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!