无人机归中平台及归中方法与流程
本发明属于无人机,具体涉及一种无人机归中平台及无人机归中方法。
背景技术:
1、无人机尤其是旋翼无人机的应用越来越广泛,如用于植保、消防、军用侦察以及电网和河道巡检等。有些需要无人机执行长航时作业或者远距离任务,对无人机需要的电量较多,往往自身携带的电量满足不了作业需求,在执行一段时间任务之后,需要降落并补充电能,相应地需要无人机停机平台或无人机机库。
2、区别于传统大型固定翼机场或者直升机停机坪,无人机停机平台的面积较小,由于无人机降落精度的限制,往往需要进行无人机自动归中操作。
3、现有的无人机机库归中机构一般采用同步带或丝杆模组等机构带动四根推杆从无人机脚架外侧推动无人机脚架进行归中,这种方式存在如下问题:
4、(1)归中机构由无人机脚架外侧进行归中所需空间大,无人机停机平台或无人机机库的面积也较大,而且归中设备数量多、结构复杂,导致机库整体体积大、重量较重,制造成本高;
5、(2)现有的归中平台为一个整体,无法完成折叠。
技术实现思路
1、本发明涉及一种无人机归中平台及无人机归中方法,至少可解决现有技术的部分缺陷。
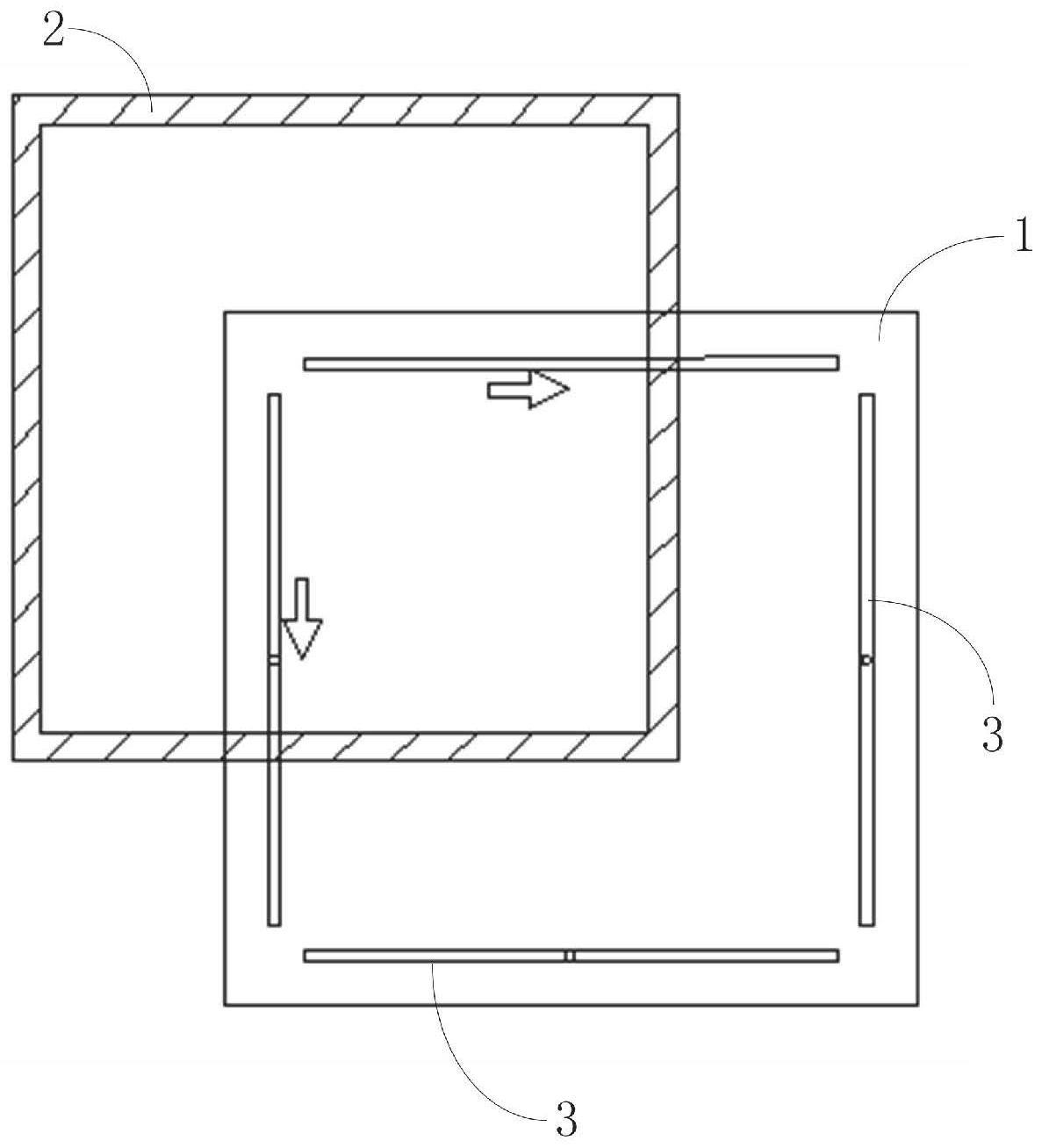
2、本发明涉及一种无人机归中平台,包括平台本体,于所述平台本体上布置有两条x向导轨和两条y向导轨,各导轨上均滑动设置有用于推动无人机脚架的归中执行件,至少其中一条导轨为内推导轨,所述内推导轨位于无人机脚架的目标归中区域内并且其归中执行件为能够从无人机脚架的内侧执行归中操作的内推执行件。
3、作为实施方式之一,所述内推执行件配置有避障机构,以使该内推执行件能够从无人机脚架的外侧进入无人机脚架的内侧。
4、作为实施方式之一,所述内推执行件包括拨杆以及滑动设置在对应导轨上的安装底座;所述避障机构包括升降导杆和避障弹簧,所述安装底座设有竖向导向槽,所述避障弹簧收容在所述竖向导向槽内,所述升降导杆底部支承在所述避障弹簧上、顶部伸出至安装底座上方,所述拨杆固定在所述升降导杆的顶端,所述升降导杆被所述避障弹簧支承在高位时,所述拨杆适于与平台本体上的无人机脚架进行楔面挤压配合。
5、作为实施方式之一,至少其中一组相邻布置的两条导轨均为内推导轨,并且二者的内推执行件的运行方向为同时靠近或同时远离该两条内推导轨所在直线的交点。
6、作为实施方式之一,相邻两导轨均为内推导轨时,二者的内推执行件通过同一组归中驱动机构驱动;所述归中驱动机构包括归中动力单元和传动齿轮组,所述传动齿轮组包括第一主动齿轮、第二主动齿轮、第一被动齿轮、第二被动齿轮和惰轮,所述第一被动齿轮与所述第一主动齿轮啮合,所述惰轮分别与所述第二主动齿轮及所述第二被动齿轮啮合,两个主动齿轮通过同一齿轮轴串联,所述归中动力单元用于驱动其中一主动齿轮转动;对应的两个内推执行件分别与两个被动齿轮传动连接,从而能在对应的导轨中滑动。
7、作为实施方式之一,至少其中一组平行布置的两条导轨均为内推导轨,二者的内推执行件通过同步机构连接以使该两个内推执行件同步运行并且运行方向相反。
8、作为实施方式之一,所述同步机构包括同步连杆和两个同步滑块,所述同步连杆铰接安装于所述平台本体上,两个同步滑块分别铰接在两个内推执行件上并且分别滑设在所述同步连杆上。
9、作为实施方式之一,所述内推执行件通过滑块摇杆机构带动从而在对应的导轨上滑动,其中,所述滑块摇杆机构中的摇杆为可伸缩杆。
10、作为实施方式之一,所述平台本体的至少部分边部连接有展开平台,所述展开平台具有展开位和收拢位,在所述展开位,所述展开平台活动至所述平台本体以外;所述展开平台在水平面上的投影位于所述平台本体在水平面上的投影范围内。
11、本发明还涉及一种无人机归中方法,包括:
12、无人机降落到如上所述的无人机归中平台上之后,通过使无人机产生x向位移和/或y向位移,以驱使无人机归中;
13、其中,无人机的至少部分位移行程是通过归中执行件从无人机脚架内侧推动无人机脚架而实现的。
14、本发明至少具有如下有益效果:
15、有别于传统的从无人机脚架外侧推动无人机脚架运动的方式,本发明中,至少部分归中执行件是从无人机脚架内侧推动无人机脚架的,这样可以减小归中执行件的位移行程,从而可以有效地减小归中平台的面积,利于无人机机库的小型化设计,能减小机库重量、降低机库生产成本。
16、由于可以从无人机脚架内侧进行归中操作,归中平台可以进行折叠设计,在进行归中平台及无人机机库小型化设计的同时,能够获得较大的无人机降落空间,从而提高无人机的使用可靠性和安全性。
技术特征:
1.一种无人机归中平台,包括平台本体,于所述平台本体上布置有两条x向导轨和两条y向导轨,各导轨上均滑动设置有用于推动无人机脚架的归中执行件,其特征在于:至少其中一条导轨为内推导轨,所述内推导轨位于无人机脚架的目标归中区域内并且其归中执行件为能够从无人机脚架的内侧执行归中操作的内推执行件。
2.如权利要求1所述的无人机归中平台,其特征在于:所述内推执行件配置有避障机构,以使该内推执行件能够从无人机脚架的外侧进入无人机脚架的内侧。
3.如权利要求2所述的无人机归中平台,其特征在于:所述内推执行件包括拨杆以及滑动设置在对应导轨上的安装底座;所述避障机构包括升降导杆和避障弹簧,所述安装底座设有竖向导向槽,所述避障弹簧收容在所述竖向导向槽内,所述升降导杆底部支承在所述避障弹簧上、顶部伸出至安装底座上方,所述拨杆固定在所述升降导杆的顶端,所述升降导杆被所述避障弹簧支承在高位时,所述拨杆适于与平台本体上的无人机脚架进行楔面挤压配合。
4.如权利要求1所述的无人机归中平台,其特征在于:至少其中一组相邻布置的两条导轨均为内推导轨,并且二者的内推执行件的运行方向为同时靠近或同时远离该两条内推导轨所在直线的交点。
5.如权利要求4所述的无人机归中平台,其特征在于:相邻两导轨均为内推导轨时,二者的内推执行件通过同一组归中驱动机构驱动;所述归中驱动机构包括归中动力单元和传动齿轮组,所述传动齿轮组包括第一主动齿轮、第二主动齿轮、第一被动齿轮、第二被动齿轮和惰轮,所述第一被动齿轮与所述第一主动齿轮啮合,所述惰轮分别与所述第二主动齿轮及所述第二被动齿轮啮合,两个主动齿轮通过同一齿轮轴串联,所述归中动力单元用于驱动其中一主动齿轮转动;对应的两个内推执行件分别与两个被动齿轮传动连接,从而能在对应的导轨中滑动。
6.如权利要求1所述的无人机归中平台,其特征在于:至少其中一组平行布置的两条导轨均为内推导轨,二者的内推执行件通过同步机构连接以使该两个内推执行件同步运行并且运行方向相反。
7.如权利要求6所述的无人机归中平台,其特征在于:所述同步机构包括同步连杆和两个同步滑块,所述同步连杆铰接安装于所述平台本体上,两个同步滑块分别铰接在两个内推执行件上并且分别滑设在所述同步连杆上。
8.如权利要求1所述的无人机归中平台,其特征在于:所述内推执行件通过滑块摇杆机构带动从而在对应的导轨上滑动,其中,所述滑块摇杆机构中的摇杆为可伸缩杆。
9.如权利要求1至8中任一项所述的无人机归中平台,其特征在于:所述平台本体的至少部分边部连接有展开平台,所述展开平台具有展开位和收拢位,在所述展开位,所述展开平台活动至所述平台本体以外;所述展开平台在水平面上的投影位于所述平台本体在水平面上的投影范围内。
10.一种无人机归中方法,其特征在于,包括:
技术总结
本发明涉及一种无人机归中平台,包括平台本体,于平台本体上布置有两条X向导轨和两条Y向导轨,各导轨上均滑动设置有用于推动无人机脚架的归中执行件,至少其中一条导轨为内推导轨,内推导轨位于无人机脚架的目标归中区域内并且其归中执行件为能够从无人机脚架的内侧执行归中操作的内推执行件。相应地还提供一种无人机归中方法。本发明中,至少部分归中执行件是从无人机脚架内侧推动无人机脚架的,这样可以减小归中执行件的位移行程,从而可以有效地减小归中平台的面积,利于无人机机库的小型化设计,能减小机库重量、降低机库生产成本。由于可以从无人机脚架内侧进行归中操作,归中平台可以进行折叠设计,能够获得较大的无人机降落空间。
技术研发人员:罗豪,杨建强,余国庆,黄佩,李永涛,刘长举
受保护的技术使用者:武汉高德红外股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!