一种大尺寸空间点阵结构
本发明涉及空间结构,具体涉及一种大尺寸空间点阵结构。
背景技术:
1、随着航天领域深空探测任务的快速推进,航天器构件尺寸逐渐向十米乃至更大的尺度发展。典型的如空间望远镜反射镜、空间太阳能电池阵列、大型遮阳/隐星罩等,这使得开发大尺寸空间结构变得异常迫切。点阵结构作为一种轻质高强的轻量化结构,已被广泛应用于航天器结构中;
2、如中国专利一种面向增材制造基于有限元网格的点阵结构构造方法,公开号:cn108920796a,提出了一种基于增材制造的航天器点阵结构构造方法。受制于增材制造加工设备的加工平台空间限制,其制备的点阵结构尺寸往往在米级以下,难以满足航天器大尺寸构件的需求。
3、为了实现更大尺寸空间结构的构造,中国专利“cn114439873a-一种组装式周期性八面体桁架点阵结构”和“cn114704534a-基于榫卯连接的插头组件和组装点阵结构”提出了基于有限的离散单元件进行组装形成大尺寸空间点阵结构的方法,其结构形式采用常见的八面体结构。现有的点阵结构研究表明八面体点阵结构为弯曲主导型结构,受外部载荷作用时,结构失效表现为杆件的屈曲,这使得八面体点阵结构的力学性能较差。为了进一步提高八面体结构的力学性能,中国专利“cn109737299a-八面体点阵结构及其衍生拓扑构型点阵结构的加工方法”引入了多级结构设计方法,并采用多种嵌片嵌锁组装方式制备出相应的多级八面体点阵结构。这种制备工艺较为繁琐,结构形式较为复杂,针对不同尺寸的结构需要定制化设计离散嵌片,这无疑增加了大尺寸空间结构的构造难度。
4、综上所述,现有制造点阵结构的尺寸有限,并且存在组装后结构力学性能较差,组装流程较为繁琐的问题。
技术实现思路
1、本发明为解决现有制造点阵结构的尺寸有限,并且存在组装后结构力学性能较差,组装流程较为繁琐的问题,提出一种大尺寸空间点阵结构。
2、本发明的一种大尺寸空间点阵结构,其组成包括多个单元体,多个单元体呈阶梯式分布或圆拱式分布;
3、进一步地,所述的每两个单元体之间通过销钉或抽芯铆钉固定连接;
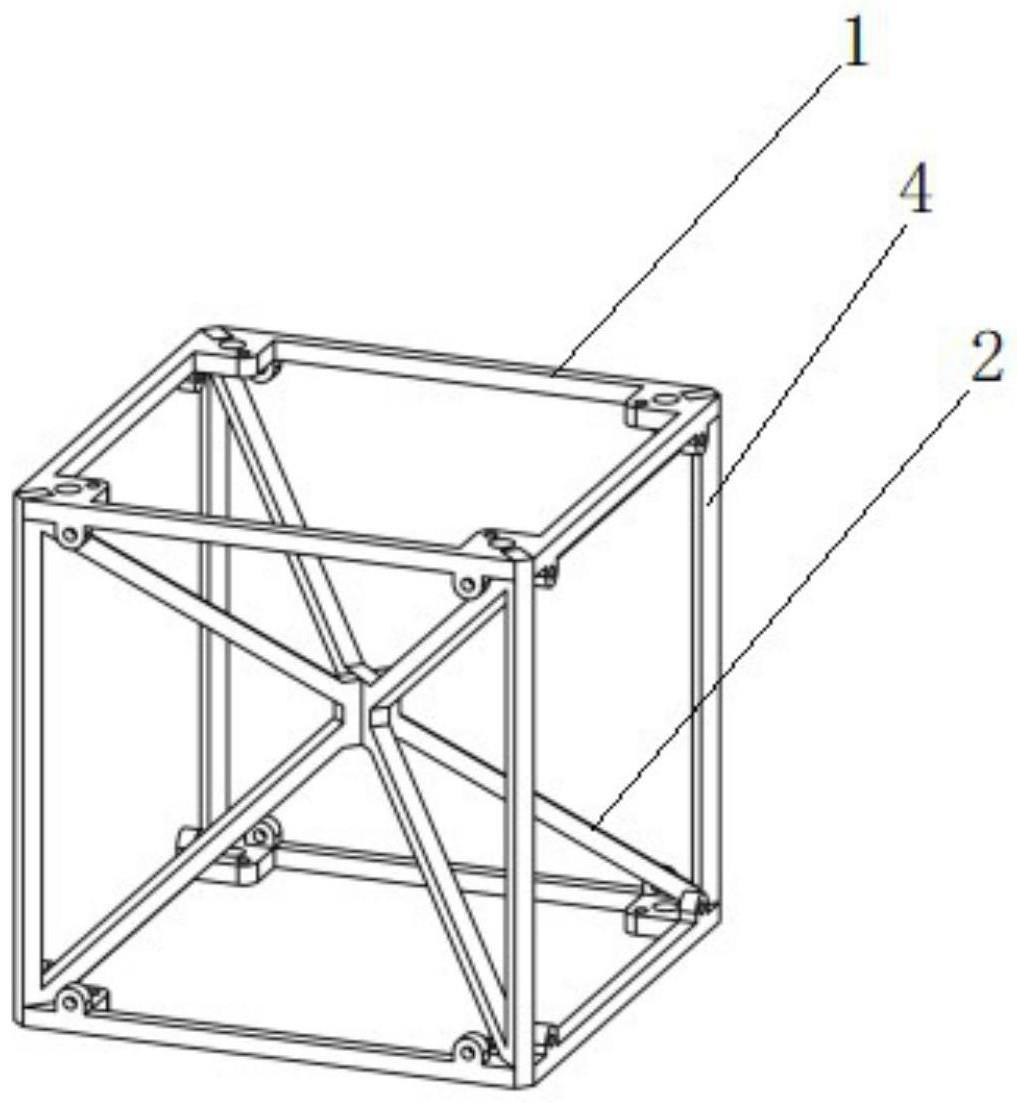
4、进一步地,所述的单元体包括两个端盖嵌片1、对角嵌片2和固定杆4;两个端盖嵌片1平行相对设置,两个端盖嵌片1通过四个固定杆4固定连接,且两个端盖嵌片1和四个固定杆4围成一个立方体框架结构,两个端盖嵌片1之间设有两个对角嵌片2,且两个对角嵌片2交叉设置;
5、进一步地,所述的对角嵌片2包括两个立杆2-1和交叉式连杆2-2;两个立杆2-1平行相对设置,且两个立杆2-1之间设有交叉式连杆2-2,两个立杆2-1和交叉式连杆2-2一体设置;
6、进一步地,所述的交叉式连杆2-2的交叉处设有方形凹槽;
7、进一步地,所述的两个对角嵌片2的交叉式连杆2-2上的方形凹槽配合插接设置;
8、进一步地,所述的端盖嵌片1的每个边杆上表面的两端分别设有一个半圆形凸起3;
9、进一步地,所述的半圆形凸起3的端面中部加工有通孔;
10、进一步地,所述的端盖嵌片1的四角处分别加工有一个方形连接槽;
11、进一步地,所述的固定杆4的端部与端盖嵌片1上的方形连接槽嵌入连接;
12、进一步地,大尺寸空间点阵结构为阶梯式时;
13、为验证点阵结构组装形成大尺寸空间结构的可行性,以常见的阶梯式空间结构为例,通过对单元体进行合理排布形成具有台阶形式的空间结构,单元体之间通过销钉过盈配合或抽芯铆钉进行连接。以三层阶梯式空间结构为例,该阶梯式空间结构由三层组成,最上层空间结构由一个单元体构成,中间层空间结构由2×2=4个单元体组成,最下层空间结构由4×4=16个单元体组成。该阶梯式空间结构组装过程为逐层堆叠码垛,每一层结构可作为下一层结构的支撑结构,结构形式简单,组装方便,为大型空间结构的建造提供了良好的参考。
14、单元体中的端盖嵌片1、对角嵌片2和固定杆4均采用3d打印技术制备,将两个端盖嵌片1、两个对角嵌片2和四个固定杆4粘结形成单元体,再采用销钉过盈配合,堆叠组装形成具有一定尺寸的空间结构;该结构为选择性激光烧结打印纯尼龙材料pa2200获得,点阵结构单元体尺寸为107.5mm×107.5mm×108mm,结构重量为32.54g,由其组成的空间结构整体密度为26.33kg/m3,加上304不锈钢销钉连接件,整体结构的密度为29.24kg/m3,远小于常见发泡泡沫100kg/m3的密度,且现有研究已表明点阵结构较泡沫材料有着更好的力学性能。故而,3d打印嵌片组装的点阵结构综合了结构轻量化设计和优良的力学性能;
15、大尺寸空间点阵结构为圆拱式时;
16、考虑到实际工程应用中空间结构不全是规则的平面结构,还存在一定曲率的异形曲面结构,以往的曲面结构往往通过对规则的平板点阵结构直接进行裁切获得,其结构表面杆件不完整,存在较多的悬挂,影响着整体的力学性能。因而,采用自由形变技术,对现有的立方体点阵结构的八个节点进行坐标变换,获得变体六面体点阵结构,再根据三维结构转化,建立二维嵌片模型,从而得到了适应曲面轮廓的单元体。将各个单元体沿着径向排列组合形成圆拱空间结构。该拱形结构径向由60个单元体组装形成,拱形外径为4.4m。
17、该类拱形空间结构作为典型壳体,不仅可用作航天器的外部轮廓,作为航天器主体支撑结构,还有望应用于行星栖息地的建筑主体中。通过自由形变技术获得的曲面空间结构适形点阵结构解决了传统平面点阵直接裁切获得异形曲面所带来的表面杆件悬挂问题,且整体的曲面结构仅由单一的适形点阵单元体组成,模块化设计大幅降低了空间结构的组装难度。
18、本发明与现有技术相比具有以下有益效果:
19、1、本发明采用多个单元体呈阶梯式分布或圆拱式分布,相比于现有的增材制造一体成型空间点阵结构,本发明的空间点阵结构在尺寸上打破一体结构的尺寸限制,可实现了数米至更大尺寸的空间结构构造;
20、2、本发明采用每两个单元体之间通过销钉或抽芯铆钉固定连接,可实现快速拆卸,便于结构的后期维护修复,组装流程简单;
21、3、本发明中单元体采用两个端盖嵌片和四个固定杆围成一个立方体框架结构,两个端盖嵌片之间设有两个对角嵌片,且两个对角嵌片交叉设置;利用两个对角嵌片交叉设置对立方体框架结构进行加固,使单元体的承载能力提高,从而提高了组装后的结构力学性能,进而保证了结构的稳定性。
技术特征:
1.一种大尺寸空间点阵结构,其特征在于:它包括多个单元体,多个单元体呈阶梯式分布或圆拱式分布。
2.根据权利要求1所述的一种大尺寸空间点阵结构,其特征在于:每两个单元体之间通过销钉或抽芯铆钉固定连接。
3.根据权利要求2所述的一种大尺寸空间点阵结构,其特征在于:所述的单元体包括两个端盖嵌片(1)、对角嵌片(2)和固定杆(4);两个端盖嵌片(1)平行相对设置,两个端盖嵌片(1)通过四个固定杆(4)固定连接,且两个端盖嵌片(1)和四个固定杆(4)围成一个立方体框架结构,两个端盖嵌片(1)之间设有两个对角嵌片(2),且两个对角嵌片(2)交叉设置。
4.根据权利要求3所述的一种大尺寸空间点阵结构,其特征在于:所述的对角嵌片(2)包括两个立杆(2-1)和交叉式连杆(2-2);两个立杆(2-1)平行相对设置,且两个立杆(2-1)之间设有交叉式连杆(2-2),两个立杆(2-1)和交叉式连杆(2-2)一体设置。
5.根据权利要求4所述的一种大尺寸空间点阵结构,其特征在于:所述的交叉式连杆(2-2)的交叉处设有方形凹槽。
6.根据权利要求5所述的一种大尺寸空间点阵结构,其特征在于:所述的两个对角嵌片(2)的交叉式连杆(2-2)上的方形凹槽配合插接设置。
7.根据权利要求3所述的一种大尺寸空间点阵结构,其特征在于:所述的端盖嵌片(1)的每个边杆上表面的两端分别设有一个半圆形凸起(3)。
8.根据权利要求7所述的一种大尺寸空间点阵结构,其特征在于:所述的半圆形凸起(3)的端面中部加工有通孔。
9.根据权利要求3所述的一种大尺寸空间点阵结构,其特征在于:所述的端盖嵌片(1)的四角处分别加工有一个方形连接槽。
10.根据权利要求9所述的一种大尺寸空间点阵结构,其特征在于:所述的固定杆(4)的端部与端盖嵌片(1)上的方形连接槽嵌入连接。
技术总结
一种大尺寸空间点阵结构,涉及空间结构技术领域。为解决现有制造点阵结构的尺寸有限,并且存在组装后结构力学性能较差,组装流程较为繁琐的问题。本发明采用多个单元体呈阶梯式分布或圆拱式分布,相比于现有的增材制造一体成型空间点阵结构,本发明的空间点阵结构在尺寸上打破一体结构的尺寸限制,可实现了数米至更大尺寸的空间结构构造;本发明中单元体采用两个端盖嵌片和四个固定杆围成一个立方体框架结构,两个端盖嵌片之间设有两个对角嵌片,且两个对角嵌片交叉设置;利用两个对角嵌片交叉设置对立方体框架结构进行加固,使单元体的承载能力提高,从而提高了组装后的结构力学性能,进而保证了结构的稳定性。本发明适用于空间结构技术领域。
技术研发人员:熊健,龚程,王文煜,韦兴宇
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!