卫星姿态抗饱和控制方法、装置、电子设备及存储介质与流程
本发明实施例涉及航天器姿态控制,特别涉及一种卫星姿态抗饱和控制方法、装置、电子设备及存储介质。
背景技术:
1、实际控制系统中,控制器大多是通过执行器来驱动被控对象的,而执行器作为物理系统,它的输出量幅值和输出量变化速率存在一定限度,也就是执行器的响应幅值和响应速率总是存在着约束。航天器技术的发展和航天任务复杂度的提高对控制能力提出了更高的要求,然而航天器姿态控制中执行器所能输出的控制力矩存在一定限制,也就是存在饱和非线性。如果设计控制器不考虑执行器存在的饱和非线性,当执行器发生饱和时,控制器的输出和被控对象的输入值不相等,可能会导致航天器姿态控制精度变差或闭环系统不稳定。
2、常见的基于线性矩阵不等式的直接抗饱和设计方法处理幅值和速率饱和问题时,要求控制器是线性的,同时求解抗饱和补偿增益时的线性矩阵不等条件复杂,计算量较大。目前尚未有针对被控对象为非线性系统的控制。
3、可见,亟需提供一种用于处理非线性系统的抗饱和控制方式。
技术实现思路
1、本发明实施例提供了一种卫星姿态抗饱和控制方法、装置、电子设备及存储介质,考虑了执行器存在饱和非线性情况,能够在执行器发生饱和时,控制器的输出和被控对象的输入尽可能相等,提高卫星姿态控制精度以及闭环系统的稳定性。
2、第一方面,本发明实施例提供了一种卫星姿态抗饱和控制方法,包括:
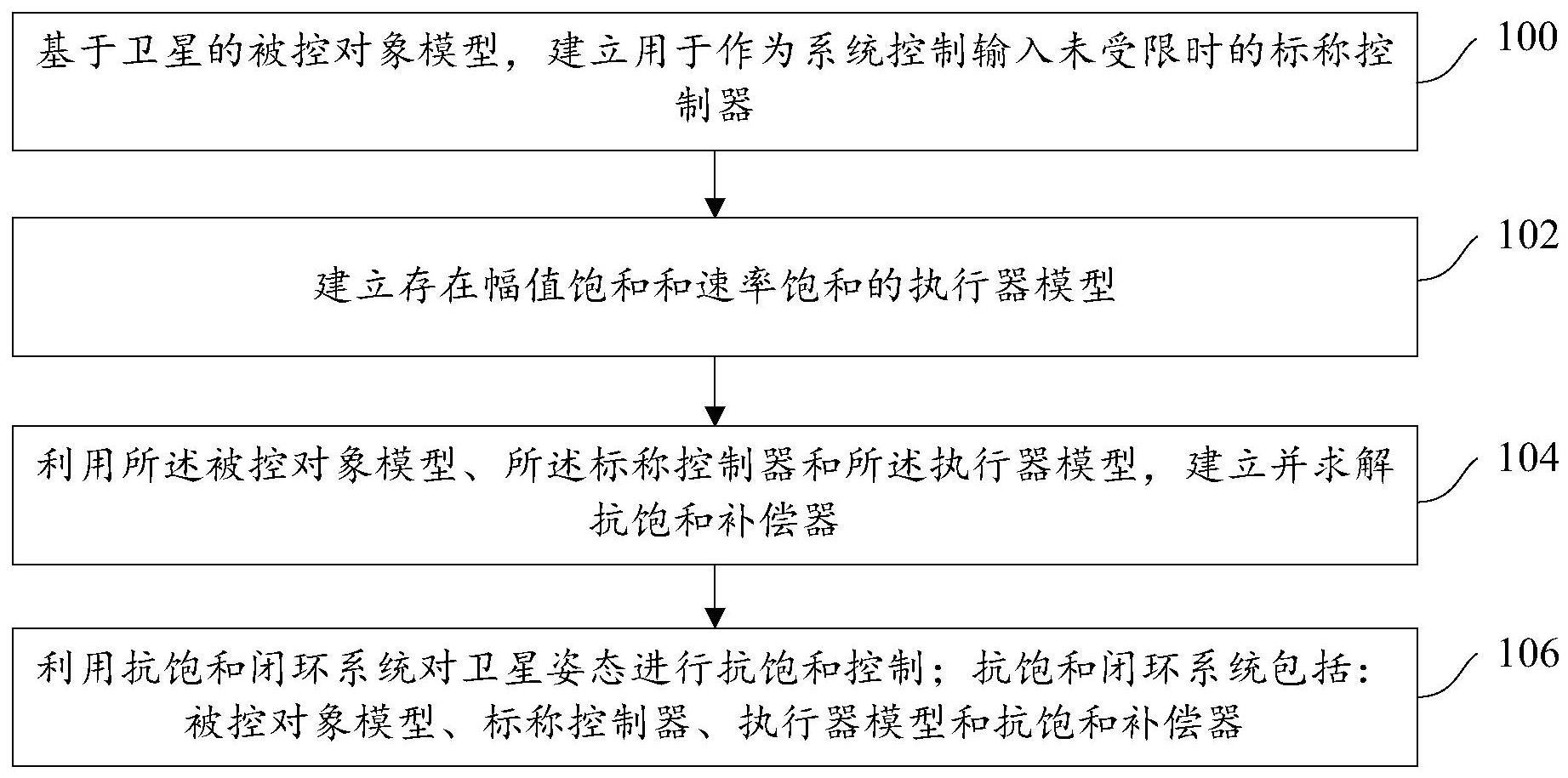
3、基于卫星的被控对象模型,建立用于作为系统控制输入未受限时的标称控制器;
4、建立存在幅值饱和和速率饱和的执行器模型;
5、利用所述被控对象模型、所述标称控制器和所述执行器模型,建立并求解抗饱和补偿器;
6、利用抗饱和闭环系统对卫星姿态进行抗饱和控制;所述抗饱和闭环系统包括:所述被控对象模型、所述标称控制器、所述执行器模型和所述抗饱和补偿器。
7、第二方面,本发明实施例还提供了一种卫星姿态抗饱和控制装置,包括:
8、控制器建立单元,用于基于卫星的被控对象模型,建立用于作为系统控制输入未受限时的标称控制器;
9、执行器建立单元,用于建立存在幅值饱和和速率饱和的执行器模型;
10、补偿器建立单元,用于利用所述被控对象模型、所述标称控制器和所述执行器模型,建立并求解抗饱和补偿器;
11、控制单元,用于利用抗饱和闭环系统对卫星姿态进行抗饱和控制;所述抗饱和闭环系统包括:所述被控对象模型、所述标称控制器、所述执行器模型和所述抗饱和补偿器。
12、第三方面,本发明实施例还提供了一种电子设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序时,实现本说明书任一实施例所述的方法。
13、第四方面,本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序在计算机中执行时,令计算机执行本说明书任一实施例所述的方法。
14、本发明实施例提供了一种卫星姿态抗饱和控制方法、装置、电子设备及存储介质,通过建立存在幅值饱和和速率饱和的执行器模型,并增加抗饱和补偿设计,形成用于对卫星姿态进行抗饱和控制的抗饱和闭环系统,在执行器发生饱和时,由抗饱和补偿器对输入进行补偿,使得控制器的输出和被控对象的输入尽可能相等,从而可以提高卫星姿态控制精度以及闭环系统的稳定性。
技术特征:
1.一种卫星姿态抗饱和控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述基于卫星的被控对象模型,建立用于作为系统控制输入未受限时的标称控制器,包括:
3.根据权利要求2所述的方法,其特征在于,所述自适应黄金分割控制器为:
4.根据权利要求2所述的方法,其特征在于,所述利用所述被控对象模型、所述标称控制器和所述执行器模型,建立并求解抗饱和补偿器,包括:
5.根据权利要求4所述的方法,其特征在于,所述抗饱和补偿器为:
6.根据权利要求1所述的方法,其特征在于,所述存在幅值饱和和速率饱和的执行器模型为:
7.根据权利要求1-6中任一所述的方法,其特征在于,所述利用抗饱和闭环系统对卫星姿态进行抗饱和控制,包括:
8.一种卫星姿态抗饱和控制装置,其特征在于,包括:
9.一种电子设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序时,实现如权利要求1-7中任一项所述的方法。
10.一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序在计算机中执行时,令计算机执行权利要求1-7中任一项所述的方法。
技术总结
本发明提供了一种卫星姿态抗饱和控制方法、装置、电子设备及存储介质,其中方法包括:基于卫星的被控对象模型,建立用于作为系统控制输入未受限时的标称控制器;建立存在幅值饱和和速率饱和的执行器模型;利用所述被控对象模型、所述标称控制器和所述执行器模型,建立并求解抗饱和补偿器;利用抗饱和闭环系统对卫星姿态进行抗饱和控制;所述抗饱和闭环系统包括:所述被控对象模型、所述标称控制器、所述执行器模型和所述抗饱和补偿器。本方案,当执行器发生饱和时,由抗饱和补偿器对输入进行补偿,使得控制器的输出和被控对象的输入尽可能相等,从而可以提高卫星姿态控制精度以及闭环系统的稳定性。
技术研发人员:郭瑞科,刘洁,张涛,杨南基,李毛毛,徐拴锋
受保护的技术使用者:北京控制工程研究所
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!