一种高速公路巡查无人机的制作方法
本发明涉及无人机,尤其涉及一种高速公路巡查无人机。
背景技术:
1、高速公路的投入使用提高了人们出行的速度,因此高速公路的重要性不言而喻,高速公路巡查是对路面、交通、路基、桥梁、隧道和沿线设施的外观状况进行巡视检查,传统的高速公路巡查是通过人工去巡查,人工巡查成本高、机动性差且不安全,随着无人机的发展,无人机慢慢替代了高速公路巡查员的工作,无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器,无人机实际上是无人驾驶飞行器的统称;
2、例如,中国专利申请号为cn201810339325.0中公开了“一种高速公路路况勘探用无人机,包括无人机本体、摄像头、螺旋桨、蓄电箱、支腿、照明结构、限位板、防尘箱、盖板、第一驱动结构、第二驱动结构、限位箱、喇叭和节能灯;无人机本体的底端设有用于勘探的摄像头;无人机本体的一端设有用于照明警示的照明结构,用于照明的节能灯与用于预警的喇叭设于用于调节角度的第一驱动结构与第二驱动结构一端的限位箱;无人机本体的底端设有用于泄压支撑的支腿”;
3、该专利的无人机本体的底端四角处设有支腿,而在不平整的路面落下后,由于重心不稳,从而造成无人机侧翻的情况,造成无人机损坏,进而造成该技术方案的局限性;另外,该专利的支腿是固定的,在无人机飞行过程中,支腿会受到很大的风阻,从而导致无人机电能消耗过快,进而导致无人机的飞行时间大大减弱。
技术实现思路
1、本发明的目的是为了解决现有技术中存在风阻很大的缺点,而提出的一种高速公路巡查无人机。
2、为了实现上述目的,本发明采用了如下技术方案:
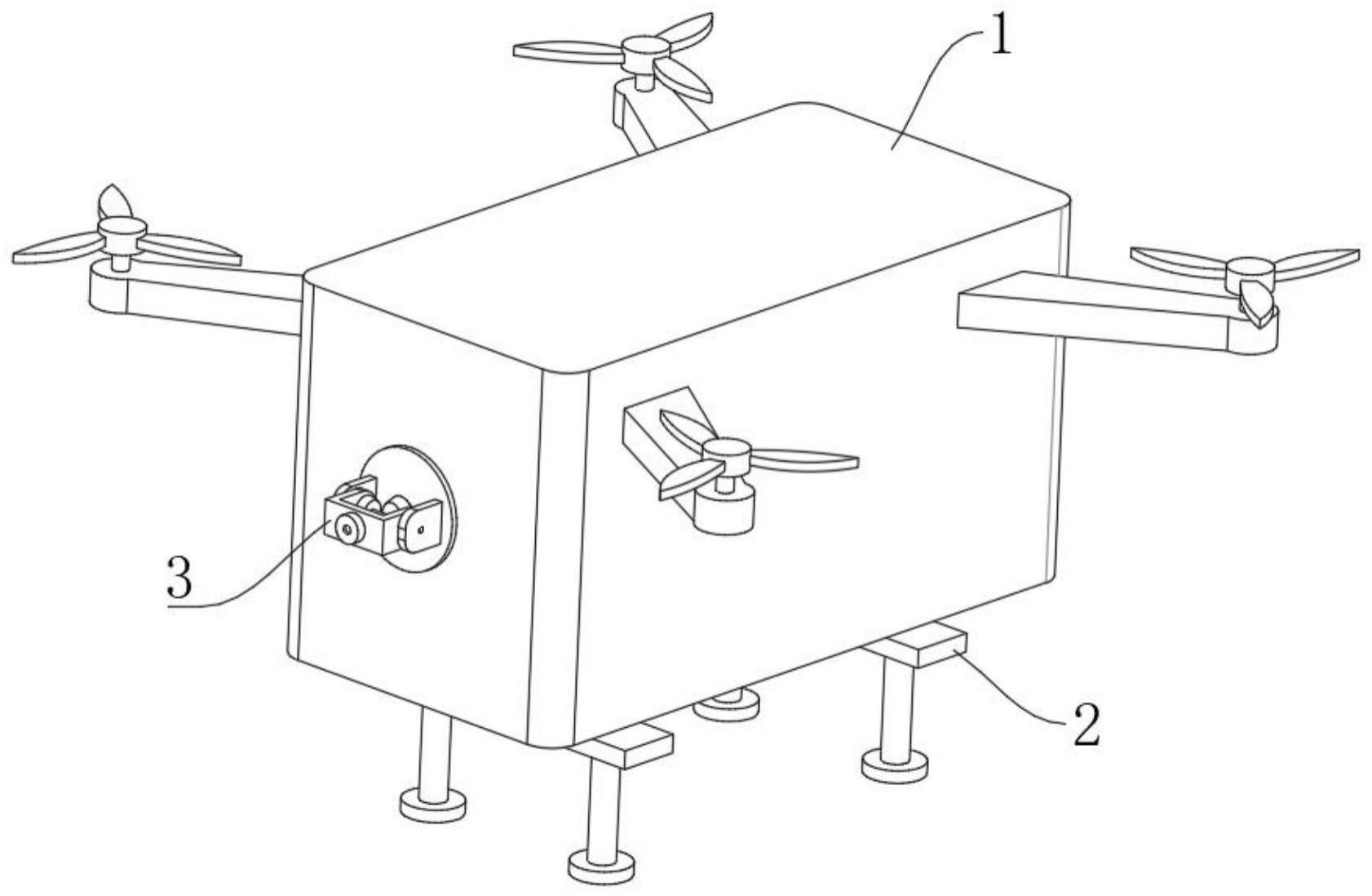
3、设计一种高速公路巡查无人机,包括无人机本体、支撑机构、摄像机构和驱动机构;所述支撑机构安装在无人机本体的底端、以对无人机本体进行支撑;所述摄像机构安装在无人机本体的外侧、以对道路路况进行巡查;所述驱动机构安装在无人机本体、以驱动摄像机构进行驱动。
4、进一步地,所述支撑机构包括固定板、双轴电机、两个蜗杆、两个第一固定座、两个蜗轮和两个支撑组件;所述固定板固定安装在无人机本体的内侧,所述双轴电机固定安装在固定板的顶部,所述双轴电机的两个输出轴分别与两个蜗杆固定连接,两个所述第一固定座分别固定安装在无人机本体内侧的两端,两个所述蜗轮分别转动安装在两个第一固定座的内侧,两个所述蜗轮分别与两个蜗杆啮合,两个所述支撑组件分别安装在两个第一固定座的内侧。
5、进一步地,所述支撑组件包括支撑组件包括第一安装座、安装板和两个支撑件;所述第一安装座与蜗轮同轴固定连接,所述安装板固定安装在第一安装座的底部,两个所述支撑件分别安装在安装板底部的两端。
6、进一步地,所述支撑件包括套筒、套杆、滑块、弹簧和支撑板;所述套筒固定安装在安装板的底部,所述套杆套设在套筒内侧、且与套筒滑动连接,所述滑块滑动安装在套筒内侧、且与套杆的顶部固定连接,所述弹簧安装在套筒的内侧,所述支撑板固定安装在套杆的底部。
7、进一步地,所述摄像机构包括空心轴、转盘、第二安装座、转动座和摄像头;所述空心轴贯穿无人机本体的侧壁、且与无人机本体转动连接,所述转盘固定安装在空心轴的一端,所述第二安装座固定安装在转盘的外侧,所述转动座的一端通过销轴与第二安装座转动连接,所述摄像头固定安装在转动座的另一端。
8、进一步地,所述摄像机构还包括第一锥齿轮、第一转轴和第二锥齿轮;所述第一转轴贯穿空心轴、且与空心轴转动连接,所述第一锥齿轮与转动座同轴固定连接,所述第二锥齿轮固定安装在第一转轴的端部、且与第一锥齿轮啮合。
9、进一步地,所述驱动机构包括第二固定座、第一齿轮、第二齿轮和传动件;所述第二固定座固定安装在无人机本体的内侧,所述空心轴的另一端与第一齿轮固定连接,所述第二齿轮固定安装在第一转轴的另一端,所述传动件安装在无人机本体内侧。
10、进一步地,所述传动件包括轴承座、第二转轴、第三齿轮、第四齿轮和卷簧;所述轴承座固定安装在无人机本体内侧,所述第二转轴与轴承座转动连接,所述第三齿轮和第四齿轮固定安装在第二转轴上,所述卷簧套设在第二转轴上,所述卷簧的一端与轴承座固定连接,所述卷簧的另一端与第二转轴固定连接,所述第三齿轮与第一齿轮啮合,所述第四齿轮与第二齿轮啮合。
11、进一步地,所述驱动机构还包括驱动件,所述驱动件包括第三固定座、驱动电机、第五齿轮、不完全齿轮和第五锥齿轮;所述第三固定座固定安装在无人机本体的内侧,所述驱动电机固定安装在无人机本体内侧、且输出轴与第五齿轮固定连接,所述不完全齿轮转动安装在第三固定座上、且与第五齿轮间歇性啮合。
12、进一步地,还包括照明组件,所述照明组件包括灯座、照明灯和第六锥齿轮;所述灯座的一端与无人机本体转动连接,所述照明灯固定安装在灯座的另一端,所述第六锥齿轮与灯座同轴固定连接,所述不完全齿轮的一侧同轴固定连接有第五锥齿轮,所述第五锥齿轮与第六锥齿轮啮合。
13、本发明提出的一种高速公路巡查无人机,有益效果在于:
14、1、通过启动双轴电机使得两个蜗杆同步转动,这就使得两个蜗轮同步转动,也就使得第一安装座带动安装板转动,从而使得两个支撑件可以相向转动,也就可以将两个支撑件收入无人机本体内部;这就可以减小无人机的飞行阻力,进而可以减小无人机本体的电能消耗,也就可以大大延长无人机本体的续航时间;
15、2、通过启动驱动电机使得驱动电机带动不完全齿轮转动,当不完全齿轮与第五齿轮脱离时,卷簧释放势能使得第二转轴反向转动,这就使得第四齿轮和第三齿轮反向转动,如此循环,第二转轴可以带动第四齿轮和第三齿轮进行周期性往复转动;这种方式可以使得摄像头间歇性的进行纵向和竖直方向的往复摆动,这样可以大大提高摄像头的拍摄范围,也就可以减少无人机的飞行距离,进而提升无人机的续航时间;
16、3、在巡查过程中,第二转轴同时可以带动第五锥齿轮转动,从而使得第六锥齿轮带动灯座同步转动,也就使得照明灯进行往复摆动,进而使得照明灯可以跟随摄像头进行移动,这就可以使得照明灯可以辅助摄像头的拍摄,也就可以适用于夜晚进行巡查工作。
技术特征:
1.一种高速公路巡查无人机,其特征在于,包括无人机本体(1)、支撑机构(2)、摄像机构(3)和驱动机构(5);所述支撑机构(2)安装在无人机本体(1)的底端、以对无人机本体(1)进行支撑;所述摄像机构(3)安装在无人机本体(1)的外侧、以对道路路况进行巡查;所述驱动机构(5)安装在无人机本体(1)、以驱动摄像机构(3)进行驱动。
2.根据权利要求1所述的一种高速公路巡查无人机,其特征在于,所述支撑机构(2)包括固定板(21)、双轴电机(22)、两个蜗杆(23)、两个第一固定座(24)、两个蜗轮(25)和两个支撑组件(26);所述固定板(21)固定安装在无人机本体(1)的内侧,所述双轴电机(22)固定安装在固定板(21)的顶部,所述双轴电机(22)的两个输出轴分别与两个蜗杆(23)固定连接,两个所述第一固定座(24)分别固定安装在无人机本体(1)内侧的两端,两个所述蜗轮(25)分别转动安装在两个第一固定座(24)的内侧,两个所述蜗轮(25)分别与两个蜗杆(23)啮合,两个所述支撑组件(26)分别安装在两个第一固定座(24)的内侧。
3.根据权利要求2所述的一种高速公路巡查无人机,其特征在于,所述支撑组件(26)包括支撑组件(26)包括第一安装座(261)、安装板(262)和两个支撑件(264);所述第一安装座(261)与蜗轮(25)同轴固定连接,所述安装板(262)固定安装在第一安装座(261)的底部,两个所述支撑件(264)分别安装在安装板(262)底部的两端。
4.根据权利要求3所述的一种高速公路巡查无人机,其特征在于,所述支撑件(264)包括套筒(2641)、套杆(2642)、滑块(2643)、弹簧(2644)和支撑板(2645);所述套筒(2641)固定安装在安装板(262)的底部,所述套杆(2642)套设在套筒(2641)内侧、且与套筒(2641)滑动连接,所述滑块(2643)滑动安装在套筒(2641)内侧、且与套杆(2642)的顶部固定连接,所述弹簧(2644)安装在套筒(2641)的内侧,所述支撑板(2645)固定安装在套杆(2642)的底部。
5.根据权利要求4所述的一种高速公路巡查无人机,其特征在于,所述摄像机构(3)包括空心轴(31)、转盘(32)、第二安装座(33)、转动座(34)和摄像头(35);所述空心轴(31)贯穿无人机本体(1)的侧壁、且与无人机本体(1)转动连接,所述转盘(32)固定安装在空心轴(31)的一端,所述第二安装座(33)固定安装在转盘(32)的外侧,所述转动座(34)的一端通过销轴与第二安装座(33)转动连接,所述摄像头(35)固定安装在转动座(34)的另一端。
6.根据权利要求5所述的一种高速公路巡查无人机,其特征在于,所述摄像机构(3)还包括第一锥齿轮(36)、第一转轴(37)和第二锥齿轮(38);所述第一转轴(37)贯穿空心轴(31)、且与空心轴(31)转动连接,所述第一锥齿轮(36)与转动座(34)同轴固定连接,所述第二锥齿轮(38)固定安装在第一转轴(37)的端部、且与第一锥齿轮(36)啮合。
7.根据权利要求6所述的一种高速公路巡查无人机,其特征在于,所述驱动机构(5)包括第二固定座(51)、第一齿轮(52)、第二齿轮(53)和传动件(54);所述第二固定座(51)固定安装在无人机本体(1)的内侧,所述空心轴(31)的另一端与第一齿轮(52)固定连接,所述第二齿轮(53)固定安装在第一转轴(37)的另一端,所述传动件(54)安装在无人机本体(1)内侧。
8.根据权利要求7所述的一种高速公路巡查无人机,其特征在于,所述传动件(54)包括轴承座(541)、第二转轴(542)、第三齿轮(543)、第四齿轮(544)和卷簧(545);所述轴承座(541)固定安装在无人机本体(1)内侧,所述第二转轴(542)与轴承座(541)转动连接,所述第三齿轮(543)和第四齿轮(544)固定安装在第二转轴(542)上,所述卷簧(545)套设在第二转轴(542)上,所述卷簧(545)的一端与轴承座(541)固定连接,所述卷簧(545)的另一端与第二转轴(542)固定连接,所述第三齿轮(543)与第一齿轮(52)啮合,所述第四齿轮(544)与第二齿轮(53)啮合。
9.根据权利要求8所述的一种高速公路巡查无人机,其特征在于,所述驱动机构(5)还包括驱动件(546),所述驱动件(546)包括第三固定座(5461)、驱动电机(5462)、第五齿轮(5463)、不完全齿轮(5464)和第五锥齿轮(5465);所述第三固定座(5461)固定安装在无人机本体(1)的内侧,所述驱动电机(5462)固定安装在无人机本体(1)内侧、且输出轴与不完全齿轮(5464)固定连接,所述第五齿轮(5463)转动安装在第三固定座(5461)上、且与第五齿轮(5463)间歇性啮合。
10.根据权利要求9所述的一种高速公路巡查无人机,其特征在于,还包括照明组件(6),所述照明组件(6)包括灯座(61)、照明灯(62)和第六锥齿轮(63);所述灯座(61)的一端与无人机本体(1)转动连接,所述照明灯(62)固定安装在灯座(61)的另一端,
技术总结
本发明涉及无人机技术领域,尤其是一种高速公路巡查无人机,包括无人机本体、支撑机构、摄像机构和驱动机构;支撑机构安装在无人机本体的底端、以对无人机本体进行支撑;摄像机构安装在无人机本体的外侧、以对道路违章车辆进行拍摄;驱动机构安装在无人机本体、以驱动摄像机构进行驱动;本发明通过启动双轴电机使得两个蜗杆同步转动,这就使得两个蜗轮同步转动,也就使得第一安装座带动安装板转动,从而使得两个支撑件可以相向转动,也就可以将两个支撑件收入无人机本体内部;这就可以减小无人机的飞行阻力,进而可以减小无人机本体的电能消耗,也就可以大大延长无人机本体的续航时间。
技术研发人员:余涛,周安顺,龙艳松,孔德万,曾嵘
受保护的技术使用者:余涛
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!