一种货仓支架起落控制方法、设备及计算机可读存储介质与流程
本发明涉及无人驾驶航空器,尤其涉及一种货仓支架起落控制方法、设备及计算机可读存储介质。
背景技术:
1、现有技术中,随着无人驾驶航空器技术的不断发展,基于无人机等无人驾驶航空器的物流应用开始得到普及。但是,受限于无人机的起落环境和续航能力,其货仓的载货能力存在较为苛刻的限制。
2、因此,如何有效地提升无人驾驶航空器在进行物流作业时的续航能力和载货能力,成为目前亟待解决的技术问题。
技术实现思路
1、为了解决现有技术中的上述技术缺陷,本发明提出了一种货仓支架起落控制方法,该方法包括:
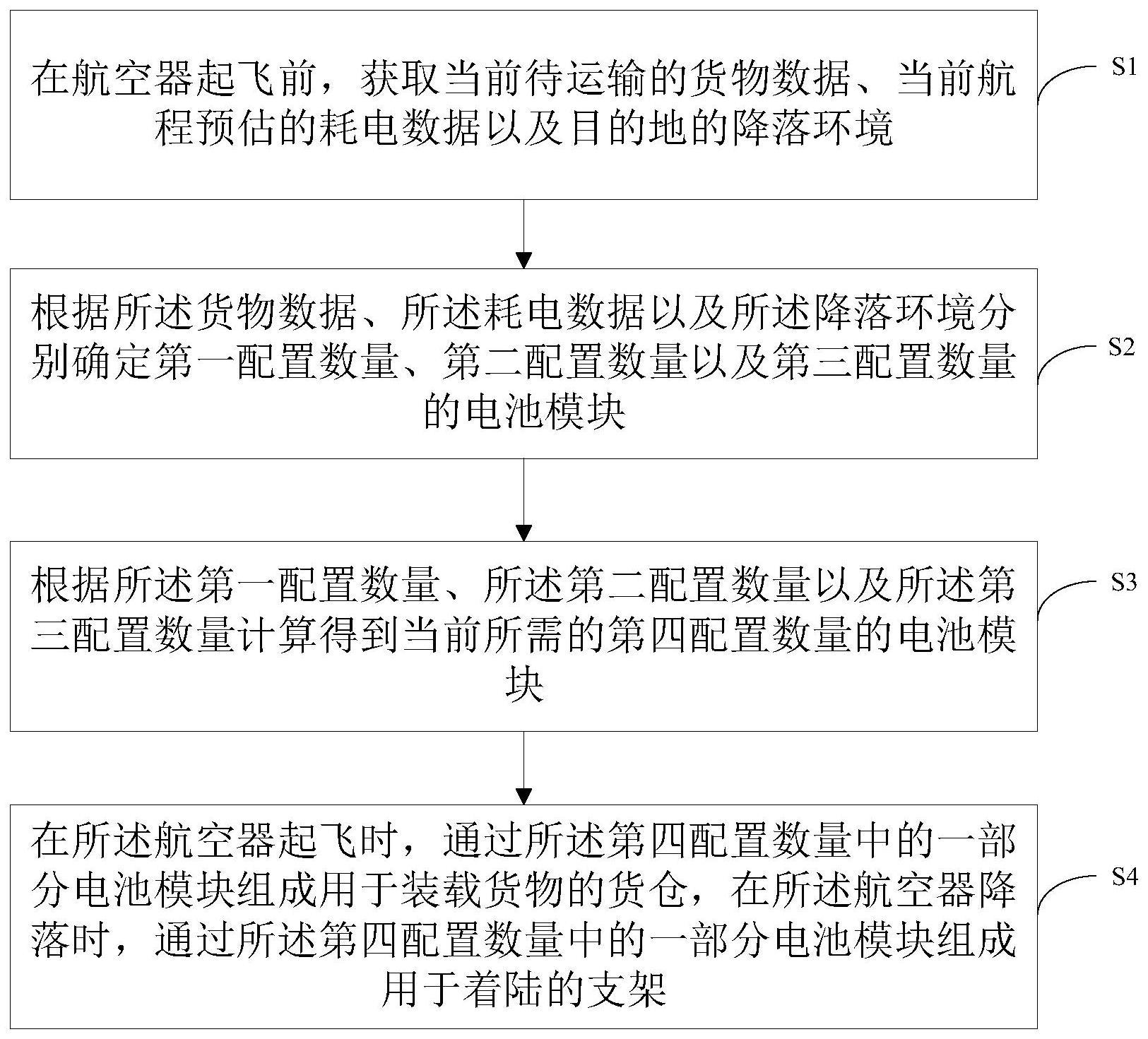
2、在航空器起飞前,获取当前待运输的货物数据、当前航程预估的耗电数据以及目的地的降落环境;
3、根据所述货物数据、所述耗电数据以及所述降落环境分别确定第一配置数量、第二配置数量以及第三配置数量的电池模块;
4、根据所述第一配置数量、所述第二配置数量以及所述第三配置数量计算得到当前所需的第四配置数量的电池模块;
5、在所述航空器起飞时,通过所述第四配置数量中的一部分电池模块组成用于装载货物的货仓,在所述航空器降落时,通过所述第四配置数量中的一部分电池模块组成用于着陆的支架。
6、可选地,所述在航空器起飞前,获取当前待运输的货物数据、当前航程预估的耗电数据以及目的地的降落环境,包括:
7、获取所述货物数据中的货物重量和货物尺寸;
8、根据所述货物重量、所述航空器的重量以及航程数据计算得到所述耗电数据,以及根据所述货物尺寸、所述航空器的尺寸以及所述目的地的地形特征计算得到目的地的降落范围。
9、可选地,所述根据所述货物数据、所述耗电数据以及所述降落环境分别确定第一配置数量、第二配置数量以及第三配置数量的电池模块,包括:
10、获取所述电池模块的模块电量和模块尺寸;
11、根据所述模块电量和所述模块尺寸,计算得到用于装载货物的所述第一配置数量的电池模块,计算得到用于提供续航电量的所述第二配置数量的电池模块,计算得到用于组建支架的所述第三配置数量的支架。
12、可选地,所述根据所述第一配置数量、所述第二配置数量以及所述第三配置数量计算得到当前所需的第四配置数量的电池模块,包括:
13、在所述第一配置数量与所述第三配置数量之和小于所述第二配置数量时,在所述第二配置数量的基础上增加第一预设数量作为所述第四配置数量,其中,所述第四配置数量大于所述第一配置数量、所述第三配置数量;
14、在所述第一配置数量与所述第三配置数量之和大于或等于所述第二配置数量时,在所述第二配置数量的基础上减少第二预设数量作为所述第四配置数量,其中,所述第四配置数量大于所述第一配置数量、所述第三配置数量。
15、可选地,所述在所述航空器起飞时,通过所述第四配置数量中的一部分电池模块组成用于装载货物的货仓,在所述航空器降落时,通过所述第四配置数量中的一部分电池模块组成用于着陆的支架,包括:
16、在所述航空器起飞前,将所述第四配置数量中的一部分电池模块组成起飞的支架,在所述航空器起飞后,将起飞的支架的一部分电池模块转移至所述货仓;
17、在所述航空器降落前,将所述货仓的一部分电池模块转移至起飞的支架,以组成着陆的支架。
18、本发明还提出了一种货仓支架起落控制设备,该设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现:
19、在航空器起飞前,获取当前待运输的货物数据、当前航程预估的耗电数据以及目的地的降落环境;
20、根据所述货物数据、所述耗电数据以及所述降落环境分别确定第一配置数量、第二配置数量以及第三配置数量的电池模块;
21、根据所述第一配置数量、所述第二配置数量以及所述第三配置数量计算得到当前所需的第四配置数量的电池模块;
22、在所述航空器起飞时,通过所述第四配置数量中的一部分电池模块组成用于装载货物的货仓,在所述航空器降落时,通过所述第四配置数量中的一部分电池模块组成用于着陆的支架。
23、可选地,所述计算机程序被所述处理器执行时实现:
24、获取所述货物数据中的货物重量和货物尺寸;
25、根据所述货物重量、所述航空器的重量以及航程数据计算得到所述耗电数据,以及根据所述货物尺寸、所述航空器的尺寸以及所述目的地的地形特征计算得到目的地的降落范围。
26、可选地,所述计算机程序被所述处理器执行时实现:
27、获取所述电池模块的模块电量和模块尺寸;
28、根据所述模块电量和所述模块尺寸,计算得到用于装载货物的所述第一配置数量的电池模块,计算得到用于提供续航电量的所述第二配置数量的电池模块,计算得到用于组建支架的所述第三配置数量的支架。
29、可选地,所述计算机程序被所述处理器执行时实现:
30、在所述第一配置数量与所述第三配置数量之和小于所述第二配置数量时,在所述第二配置数量的基础上增加第一预设数量作为所述第四配置数量,其中,所述第四配置数量大于所述第一配置数量、所述第三配置数量;
31、在所述第一配置数量与所述第三配置数量之和大于或等于所述第二配置数量时,在所述第二配置数量的基础上减少第二预设数量作为所述第四配置数量,其中,所述第四配置数量大于所述第一配置数量、所述第三配置数量;
32、在所述航空器起飞前,将所述第四配置数量中的一部分电池模块组成起飞的支架,在所述航空器起飞后,将起飞的支架的一部分电池模块转移至所述货仓;
33、在所述航空器降落前,将所述货仓的一部分电池模块转移至起飞的支架,以组成着陆的支架。
34、本发明还提出了一种计算机可读存储介质,该计算机可读存储介质上存储有货仓支架起落控制程序,货仓支架起落控制程序被处理器执行时实现如上述任一项所述的货仓支架起落控制方法的步骤。
35、实施本发明的货仓支架起落控制方法、设备及计算机可读存储介质,通过在航空器起飞前,获取当前待运输的货物数据、当前航程预估的耗电数据以及目的地的降落环境;根据所述货物数据、所述耗电数据以及所述降落环境分别确定第一配置数量、第二配置数量以及第三配置数量的电池模块;根据所述第一配置数量、所述第二配置数量以及所述第三配置数量计算得到当前所需的第四配置数量的电池模块;在所述航空器起飞时,通过所述第四配置数量中的一部分电池模块组成用于装载货物的货仓,在所述航空器降落时,通过所述第四配置数量中的一部分电池模块组成用于着陆的支架。实现了一种基于独立电池模块的货仓支架一体化的起落控制方案,使得货仓支架可根据实际的航程电量需求进行适应性地相互转换,同步提升了航空器的载货能力和续航能力,增强了物流时效性。
技术特征:
1.一种货仓支架起落控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的货仓支架起落控制方法,其特征在于,所述在航空器起飞前,获取当前待运输的货物数据、当前航程预估的耗电数据以及目的地的降落环境,包括:
3.根据权利要求2所述的货仓支架起落控制方法,其特征在于,所述根据所述货物数据、所述耗电数据以及所述降落环境分别确定第一配置数量、第二配置数量以及第三配置数量的电池模块,包括:
4.根据权利要求3所述的货仓支架起落控制方法,其特征在于,所述根据所述第一配置数量、所述第二配置数量以及所述第三配置数量计算得到当前所需的第四配置数量的电池模块,包括:
5.根据权利要求4所述的货仓支架起落控制方法,其特征在于,所述在所述航空器起飞时,通过所述第四配置数量中的一部分电池模块组成用于装载货物的货仓,在所述航空器降落时,通过所述第四配置数量中的一部分电池模块组成用于着陆的支架,包括:
6.一种货仓支架起落控制设备,其特征在于,所述设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现:
7.根据权利要求6所述的货仓支架起落控制设备,其特征在于,所述计算机程序被所述处理器执行时实现:
8.根据权利要求7所述的货仓支架起落控制设备,其特征在于,所述计算机程序被所述处理器执行时实现:
9.根据权利要求8所述的货仓支架起落控制设备,其特征在于,所述计算机程序被所述处理器执行时实现:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有货仓支架起落控制程序,所述货仓支架起落控制程序被处理器执行时实现如权利要求1至5中任一项所述的货仓支架起落控制方法的步骤。
技术总结
本发明公开了一种货仓支架起落控制方法、设备及计算机可读存储介质,其中,该方法包括:在航空器起飞前,根据货物数据、耗电数据以及降落环境分别确定第一配置数量、第二配置数量以及第三配置数量的电池模块,以及计算得到当前所需的第四配置数量的电池模块;在所述航空器起飞时,通过所述第四配置数量中的一部分电池模块组成用于装载货物的货仓,在所述航空器降落时,通过所述第四配置数量中的一部分电池模块组成用于着陆的支架。本发明实现了一种基于独立电池模块的货仓支架一体化的起落控制方案,使得货仓支架可根据实际航程电量需求进行适应性地相互转换,同步提升了航空器的载货能力和续航能力,增强了物流时效性。
技术研发人员:胡华智,贾宗林
受保护的技术使用者:亿航智能设备(广州)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!