一种基于无线遥控的地形勘探用无人机
本发明属于无人机,具体涉及一种基于无线遥控的地形勘探用无人机。
背景技术:
1、无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,与有人驾驶飞机相比,无人机往往更适合那些太“愚钝,肮脏或危险”的任务,而有些场合也需要用到无人机,比如在地形勘探上使用无人机,无人机在地形勘探时,摄像机的位置无法得到有效调整,导致勘探出的地形不清晰甚至出现空缺,勘探的地形不完整,在摄像机位置调整时会用到复位弹簧,复位弹簧是在调整完摄像机后摄像机能够再进行复位的一种结构,而复位弹簧长期使用失去弹性就需要经常更换,现需要一种不使用复位弹簧也能够高效转动摄像角度的无人机。该现象成为本领域人员亟待解决的问题。
技术实现思路
1、本发明的目的在于针对现有的集材装置一种基于无线遥控的地形勘探用无人机,以解决上述背景技术中提出的问题。
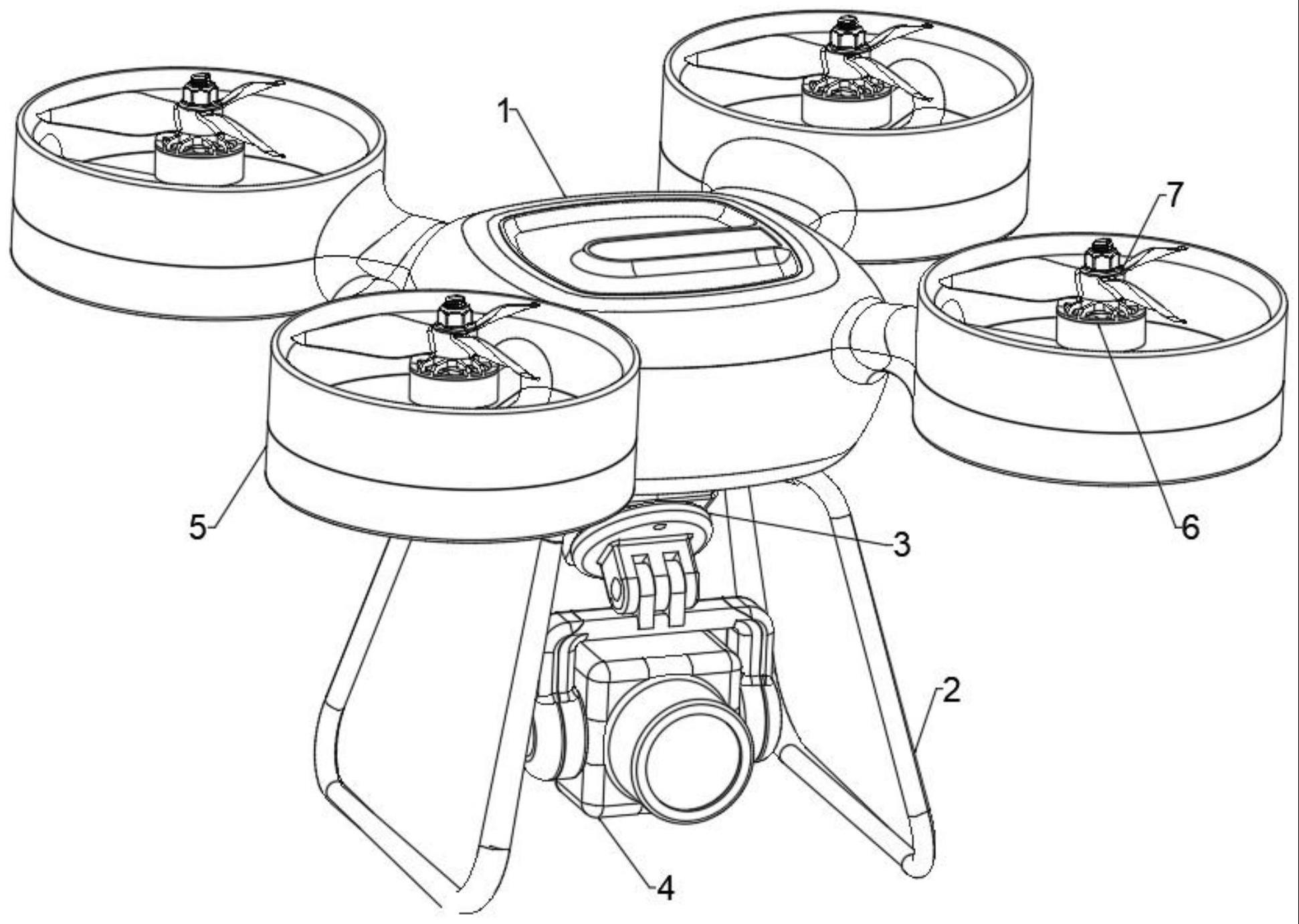
2、为了解决上述技术问题,本发明提供如下技术方案:一种基于无线遥控的地形勘探用无人机,包括无人机和智能遥控系统,其特征在于:所述无人机包括机体,所述机体下方固定安装有支撑架,所述机体中间下方固定安装有固定座,所述固定座右侧轴连接有摄像机,所述机体四周均固定安装有机架,所述机架中间固定安装有电机,所述电机的输出端设置有螺旋叶,所述机体内部上方设置有电力系统,所述机体内部下方设置有调控机构,所述智能遥控系统与电力系统电连接,所述电力系统分别与调控机构、电机、摄像机电连接。
3、本发明进一步说明,所述智能遥控系统包括遥控模块、指令发射模块,所述电力系统包括控制模块、指令接收模块、指令驱动模块,所述遥控模块与控制模块电连接,所述控制模块分别与电机、摄像机电连接,所述指令发射模块与指令接收模块电连接,所述指令接收模块与指令驱动模块电连接,所述指令驱动模块与调控机构电连接;
4、所述遥控模块用于操作人员通过遥控器发出信号对无人机进行遥控,所述控制模块用于根据遥控模块发出的信号驱动电机和摄像机运行,所述指令发射模块用于操作人员发出指令,所述指令接收模块用于接收指令,所述指令驱动模块用于根据接收的指令驱动调控机构智能化运行。
5、本发明进一步说明,所述智能遥控系统包括以下运行步骤:
6、步骤s1、智能遥控系统运行;
7、步骤s2、操作人员通过遥控器发出信号对无人机进行遥控,根据遥控模块发出的信号驱动电机和摄像机运行,使无人机飞行并对地面进行拍摄;
8、步骤s3、航拍过程中操作人员通过指令发射模块发出指令到指令接收模块中,再根据接收的指令使指令驱动模块对调控机构进行调控,对摄像机的方向进行改变;
9、步骤s4、勘探完成后,通过遥控模块使无人机飞回,关闭无人机,关闭智能遥控系统。
10、本发明进一步说明,所述调控机构包括滑动腔,所述机体内壁底部开设有通孔,所述滑动腔固定于通孔内,所述滑动腔内壁滑动连接有滑杆,所述滑杆下端与摄像机固定连接,所述滑杆上方固定安装有电磁块,所述机体内壁前后两侧固定安装有电转盘,两个所述电转盘之间固定有转杆,所述转杆外侧与电磁块固定连接。
11、本发明进一步说明,所述滑杆内部呈中空状且填充有磁流变液,所述滑杆为硅胶材质制成,所述指令驱动模块与电磁块电连接。
12、本发明进一步说明,所述电磁块右侧外表面固定安装有齿盘一,所述齿盘一右侧啮合有齿盘二,所述齿盘一外侧与齿盘二外侧均设置有齿块,所述齿盘一外侧的齿块为弹性材质且内部填充有磁流变液,所述齿盘二一侧固定安装有挤压杆,所述机体内壁固定安装有液压腔,所述液压腔内壁滑动连接有液压板,所述液压板下方固定安装有液压杆,所述液压腔内部填充有润滑油,所述固定座与摄像机连接处设置排液腔,且排液腔与液压腔管道连接。
13、本发明进一步说明,所述排液腔表面开设有若干小孔,所述齿盘二与机体内壁轴承连接,且轴承连接处设置有阻尼器。
14、本发明进一步说明,所述液压板与液压腔内壁弹簧连接。
15、与现有技术相比,本发明所达到的有益效果是:本发明,采用电磁块,当需要勘探无人机下方的地形时,电驱动使电磁块不运行,电磁块不会产生磁力,这时滑杆柔软,延展性强,可以顺利拉动摄像机转动一定角度,当需要勘探无人机前方的地形时,电驱动使电磁块运行,电磁块产生磁力,磁力对滑杆内部的磁流变液进行作用,使磁流变液变为固态,这时滑杆整体变硬,在电转盘复位,通过滑杆推动摄像机朝向前方时,使滑杆具有足够的支撑力,避免滑杆较软无法顺利推动摄像机,同时通过滑杆既能够保证摄像机顺利转动,同时无需在摄像机与固定座连接处设置涡卷弹簧,防止摄像机频繁转动后弹簧失去弹力无法正常形变,使摄像机持续有效的改变朝向,从而更好的进行地形勘探工作。
技术特征:
1.一种基于无线遥控的地形勘探用无人机,包括无人机和智能遥控系统,其特征在于:所述无人机包括机体(1),所述机体(1)下方固定安装有支撑架(2),所述机体(1)中间下方固定安装有固定座(3),所述固定座(3)右侧轴连接有摄像机(4),所述机体(1)四周均固定安装有机架(5),所述机架(5)中间固定安装有电机(6),所述电机(6)的输出端设置有螺旋叶(7),所述机体(1)内部上方设置有电力系统,所述机体(1)内部下方设置有调控机构,所述智能遥控系统与电力系统电连接,所述电力系统分别与调控机构、电机(6)、摄像机(4)电连接。
2.根据权利要求1所述的一种基于无线遥控的地形勘探用无人机,其特征在于:所述智能遥控系统包括遥控模块、指令发射模块,所述电力系统包括控制模块、指令接收模块、指令驱动模块,所述遥控模块与控制模块电连接,所述控制模块分别与电机(6)、摄像机(4)电连接,所述指令发射模块与指令接收模块电连接,所述指令接收模块与指令驱动模块电连接,所述指令驱动模块与调控机构电连接;
3.根据权利要求2所述的一种基于无线遥控的地形勘探用无人机,其特征在于:所述智能遥控系统包括以下运行步骤:
4.根据权利要求3所述的一种基于无线遥控的地形勘探用无人机,其特征在于:所述调控机构包括滑动腔(8),所述机体(1)内壁底部开设有通孔,所述滑动腔(8)固定于通孔内,所述滑动腔(8)内壁滑动连接有滑杆(9),所述滑杆(9)下端与摄像机(4)固定连接,所述滑杆(9)上方固定安装有电磁块(10),所述机体(1)内壁前后两侧固定安装有电转盘(11),两个所述电转盘(11)之间固定有转杆(12),所述转杆(12)外侧与电磁块(10)固定连接。
5.根据权利要求4所述的一种基于无线遥控的地形勘探用无人机,其特征在于:所述滑杆(9)内部呈中空状且填充有磁流变液,所述滑杆(9)为硅胶材质制成,所述指令驱动模块与电磁块(10)电连接。
6.根据权利要求5所述的一种基于无线遥控的地形勘探用无人机,其特征在于:所述电磁块(10)右侧外表面固定安装有齿盘一(13),所述齿盘一(13)右侧啮合有齿盘二(14),所述齿盘一(13)外侧与齿盘二(14)外侧均设置有齿块,所述齿盘一(13)外侧的齿块为弹性材质且内部填充有磁流变液,所述齿盘二(14)一侧固定安装有挤压杆(15),所述机体(1)内壁固定安装有液压腔(16),所述液压腔(16)内壁滑动连接有液压板(17),所述液压板(17)下方固定安装有液压杆(18),所述液压腔(16)内部填充有润滑油,所述固定座(3)与摄像机(4)连接处设置排液腔(19),且排液腔(19)与液压腔(16)管道连接。
7.根据权利要求6所述的一种基于无线遥控的地形勘探用无人机,其特征在于:所述排液腔(19)表面开设有若干小孔,所述齿盘二(14)与机体(1)内壁轴承连接,且轴承连接处设置有阻尼器(20)。
8.根据权利要求7所述的一种基于无线遥控的地形勘探用无人机,其特征在于:所述液压板(17)与液压腔(16)内壁弹簧连接。
技术总结
本发明公开了一种基于无线遥控的地形勘探用无人机,其中包括无人机和智能遥控系统,所述无人机包括机体,所述机体下方固定安装有支撑架,所述机体中间下方固定安装有固定座,所述固定座右侧轴连接有摄像机,所述机体四周均固定安装有机架,所述机架中间固定安装有电机,所述电机的输出端设置有螺旋叶,所述机体内部上方设置有电力系统,所述机体内部下方设置有调控机构,所述智能遥控系统与电力系统电连接,所述电力系统分别与调控机构、电机、摄像机电连接,所述智能遥控系统包括遥控模块、指令发射模块,所述电力系统包括控制模块、指令接收模块、指令驱动模块,该装置解决了当前无法智能化的加强地形勘探质量的问题。
技术研发人员:杨艺,张嘉鑫,张争坤,袁朝阳,仲翔,孙迪兴
受保护的技术使用者:江苏理工学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!