惯性-气流坐标系交互的飞行器气流干扰观测器设计方法
本发明涉及自动控制,特别涉及一种惯性-气流坐标系交互的飞行器气流干扰观测器设计方法。
背景技术:
1、在固定翼飞行器机动飞行过程中,阵风、紊流、发动机振动以及不可预知的操作等因素,都会对飞行器的性能造成负面影响,特别当飞行器在峡谷、海面等特殊地形执行飞行任务时,若外部干扰不能被及时抑制,将会给整个飞行控制系统带来极大的安全隐患。显然,外部干扰的存在不仅会降低大机动飞行器的飞行性能,而且会和飞行器气动力耦合在一起,给控制器的设计带来困难。目前对外部干扰的处理方法以干扰观测器方法最具代表性。
2、现有技术在飞行器干扰观测器设计过程中,通常将由气流干扰引起的未知项当作复合干扰进行估计。然而,飞行器所受外部干扰与飞行状态存在剧烈的耦合,尤其飞行器在机动飞行时,常规处理复合干扰的方式不利于飞行器对气流干扰进行精确估计,导致现有气流干扰估计存在较大的误差。
技术实现思路
1、发明目的:针对以上问题,本发明目的是提供一种惯性-气流坐标系交互的飞行器气流干扰观测器设计方法。
2、技术方案:本发明的一种惯性-气流坐标系交互的飞行器气流干扰观测器设计方法,包括以下步骤:
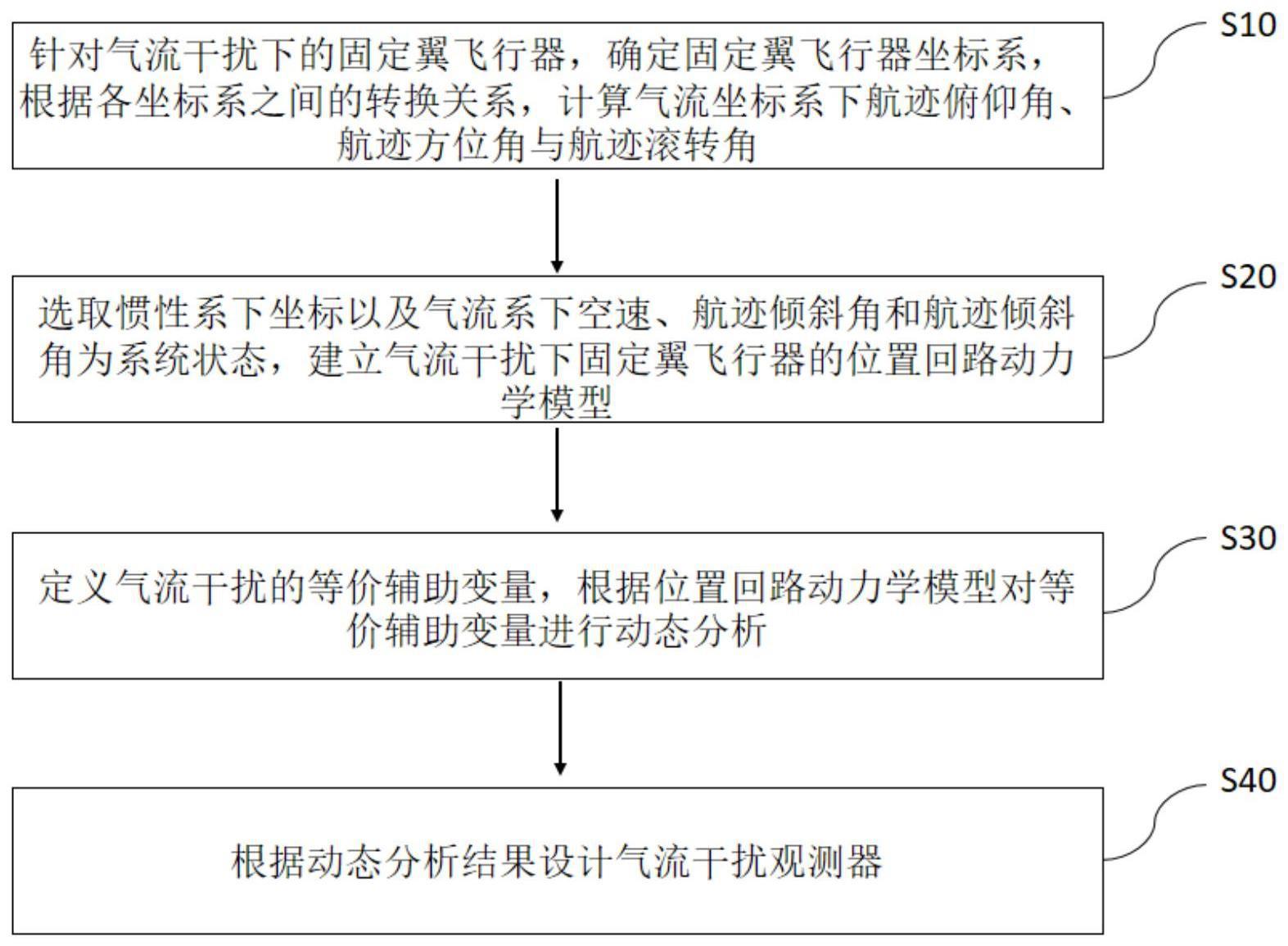
3、s10,针对气流干扰下的固定翼飞行器,确定固定翼飞行器坐标系,根据各坐标系之间的转换关系,计算气流坐标系下航迹俯仰角、航迹方位角与航迹滚转角;
4、s20,选取惯性系下坐标以及气流系下空速、航迹倾斜角、航迹倾斜角为系统状态,建立气流干扰下固定翼飞行器的位置回路动力学模型;
5、s30,定义气流干扰的等价辅助变量,根据位置回路动力学模型对等价辅助变量进行动态分析;
6、s40,根据动态分析结果设计气流干扰观测器。
7、进一步地,步骤s10具体包括:
8、通过定义固定翼飞行器各坐标系下的状态变量,得到各坐标系之间的转换矩阵分别如下:
9、机体坐标轴系到气流坐标轴系的转换矩阵表达式为:
10、
11、机体坐标轴系到惯性坐标轴系的旋转矩阵表达式为:
12、
13、惯性坐标轴系到气流坐标轴系的转换矩阵表达式为:
14、
15、式中,βa表示侧滑角,αa表示迎角,θb表示俯仰角,φb表示滚转角,ψb表示偏航角;
16、根据坐标系转换关系得到航迹俯仰角γp、航迹方位角χp和航迹滚转角μp。
17、进一步地,步骤s20具体包括:
18、定义固定翼飞行器的状态向量为pg=[px,py,pz]t、ξa=[va,χp,γp]t和ωa=[αa,βa,μp]t,令wv与wa分别表示风速与风加速度在惯性坐标轴系下的投影,则固定翼飞行器的位置回路动力学模型表达式为:
19、
20、其中,px,py和pz表示飞行器的位置信息,va表示空速;fp(·)与fξ(·)为已知函数向量,rξ(·)为已知函数矩阵,表达式分别如下:
21、
22、
23、
24、式中,ft表示发动机推力。
25、进一步地,定义风速与风加速度矢量表示为dw=col{wv,wa},则飞行器气流干扰由以下外部系统产生:
26、
27、其中,为外部系统的状态向量,l表示正整数表征外部系统状态维度,为已知的常数矩阵,为已知的常数矩阵,为已知的常数矩阵,满足可观测性条件,为未知的时变向量,t≥0表示时间,时变向量δw(t)有界,即常值向量δδ>0分别满足如下关系:
28、
29、进一步地,步骤s30具体包括:
30、定义飞行器气流干扰的等价辅助变量为sw,表达式为:
31、
32、其中,xw为增广的系统状态向量,xw=[px,py,pz,va,χp,γp]t,表示非线性函数向量,表达式为:
33、
34、式中,表示增益矩阵,lw和之间存在以下关系:
35、
36、式中,rw表示干扰系数矩阵,rw=diag{i3,rξ},i3表示3×3的单位矩阵;
37、根据飞行器产生气流干扰的外部系统和位置回路动力学模型,将等价辅助变量sw的动态归纳为以下表达式:
38、
39、其中,
40、进一步地,步骤s40具体包括:
41、针对气流干扰的等价辅助变量sw,设计飞行器气流干扰观测器表达式为:
42、
43、其中,为观测器状态,表示风速与风加速度矢量dw的估计。
44、有益效果:本发明与现有技术相比,其显著优点是:相较常规线性干扰观测器设计将由气流干扰引起的未知项当作复合干扰进行估计,本发明引入了特殊的非确定等价辅助变量sw,能够实现气流干扰与飞行状态的解耦估计,更加适用于飞行器剧烈机动的场景。
技术特征:
1.惯性-气流坐标系交互的飞行器气流干扰观测器设计方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的飞行器气流干扰观测器设计方法,其特征在于,步骤s10具体包括:
3.根据权利要求2所述的飞行器气流干扰观测器设计方法,其特征在于,步骤s20具体包括:
4.根据权利要求3所述的飞行器气流干扰观测器设计方法,其特征在于,
5.根据权利要求4所述的飞行器气流干扰观测器设计方法,其特征在于,步骤s30具体包括:
6.根据权利要求5所述的飞行器气流干扰观测器设计方法,其特征在于,步骤s40具体包括:
技术总结
本发明公开了惯性‑气流坐标系交互的飞行器气流干扰观测器设计方法,具体步骤包括:针对气流干扰下的固定翼飞行器,确定固定翼飞行器坐标系,根据各坐标系之间的转换关系,计算气流坐标系下航迹俯仰角、航迹方位角与航迹滚转角;选取惯性系下坐标以及气流系下空速、航迹倾斜角和航迹倾斜角为系统状态,建立气流干扰下固定翼飞行器的位置回路动力学模型;定义气流干扰的等价辅助变量,根据位置回路动力学模型对等价辅助变量进行动态分析;根据动态分析结果设计气流干扰观测器。本发明引入了非确定等价辅助变量,能够实现气流干扰与飞行状态的解耦估计,更加适用于飞行器剧烈机动的场景。
技术研发人员:雍可南,陈谋,王鹏,邵书义
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!