一种无人机倾斜摄影测量偏航角自动纠偏机构及其使用方法
本发明涉及无人机偏航角纠偏,具体为一种无人机倾斜摄影测量偏航角自动纠偏机构及其使用方法。
背景技术:
1、倾斜摄影技术是国际测绘领域近些年发展起来的一项高新技术,在进行倾斜摄像时,通常需要依附与无人机的应用。
2、无人机在飞行过程中通常需要转向,在进行转向时一般要顺着预先设定轨迹航道进行转向,在转向途中进行摄像时,容易因为无人机转向时幅度较大,导致摄像主机的摄像头摄像位置与实际拍摄位置之间的夹角角度过大或过小,导致难以进行正常摄像,在摄像过程中受到影响,因此需要对偏航角进行调节,但现有技术在对摄像主机的偏航角进行调节时,难以做到实时调节,难以检测到摄像主机的倾斜角度,在使用时的实用性较低,灵活性较差。
技术实现思路
1、(一)解决的技术问题
2、本发明的目的在于提供一种无人机倾斜摄影测量偏航角自动纠偏机构及其使用方法,以解决上述背景技术中提出现有技术在对摄像主机的偏航角进行调节时,难以做到实时调节,难以检测到摄像主机的倾斜角度,在使用时的实用性较低,灵活性较差的问题。
3、(二)技术方案
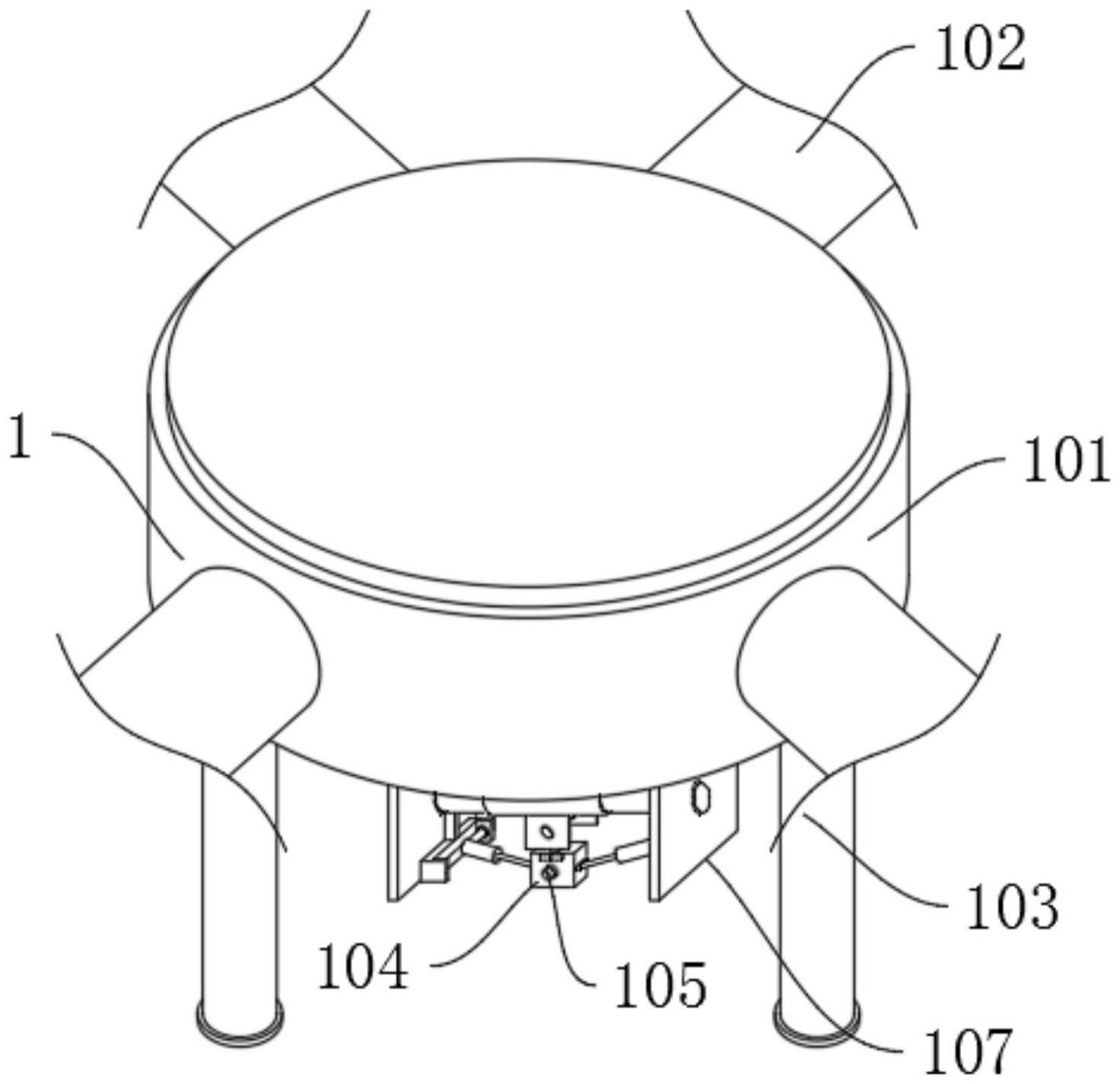
4、为实现上述目的,本发明提供如下技术方案:一种无人机倾斜摄影测量偏航角自动纠偏机构,包括主体机构和控制机构,所述控制机构位于主体机构的下方,所述主体机构包括无人机主机体、机翼架和支撑脚,所述机翼架固定安装在无人机主机体的外端,所述支撑脚固定安装在无人机主机体的下端;
5、所述主体机构还包括摄影主机、摄像头、倾角水平传感器、固定板、手动调节组件和自纠偏组件,所述摄影主机活动安装在无人机主机体的下方,所述摄像头固定安装在摄影主机的前端,所述倾角水平传感器固定安装在摄影主机前端的上端,所述固定板固定安装在无人机主机体下端的左右两端。
6、优选的,所述手动调节组件固定安装在固定板的中部,所述自纠偏组件活动安装在无人机主机体的下方,便于完成摄像主机的偏航角角度调节。
7、优选的,所述手动调节组件包括支撑轴承、旋转杆、支撑圈、对接板和调节杆,所述支撑轴承固定安装在固定板的中部,所述旋转杆旋转连接支撑轴承,旋转杆便于对支撑圈进行固定安装。
8、优选的,所述支撑圈固定安装在旋转杆的外端,所述对接板固定安装在支撑圈下端的前后两端,所述调节杆旋转安装在对接板的中部,调节杆便于带动摄像主机进行旋转,使其能够对其偏航角角度进行调节。
9、优选的,所述自纠偏组件包括连接杆、凹形支撑板一、支撑杆一、电动推杆、凹形支撑板二和支撑杆二,所述连接杆固定安装在旋转杆下端的左右两端,所述凹形支撑板一固定安装在连接杆的下端,所述支撑杆一旋转安装在凹形支撑板一的中部,所述电动推杆固定安装在支撑杆一的中部,所述电动推杆固定连接支撑杆一,所述凹形支撑板二固定安装在摄影主机的左右两端,所述支撑杆二旋转安装在凹形支撑板二的中部,所述电动推杆固定连接支撑杆二,所述摄影主机的上端固定连接调节杆,便于在无人机飞行时在高空对外部进行摄影。
10、优选的,所述控制机构包括控制器,所述控制器固定安装在摄影主机前端的右端,所述倾角水平传感器电性连接控制器,所述控制器电性连接电动推杆,倾角水平传感器便于对摄像主机的偏航角进行检测。
11、一种无人机倾斜摄影测量偏航角自动纠偏机构的使用方法,包括以下步骤:
12、步骤一:在无人机主机体起飞后,如出现摄像头偏航角情况时,倾角水平传感器与摄影主机一并出现倾斜角度,倾角水平传感器检测到处于倾斜角度,倾角水平传感器的输出端将数字信号发送至控制器的输入端,控制器通过输入端接收到信号后;
13、步骤二:控制器控制启动电动推杆,使电动推杆推动支撑杆二,支撑杆二将顶动力传递至凹形支撑板二,凹形支撑板二对摄影主机进行顶动,使得摄影主机通过调节杆微微旋转对其角度进行纠偏;
14、步骤三:当倾角水平传感器检测到处于水位角度时,倾角水平传感器将信号发送至控制器,控制器控制关闭电动推杆,使得摄影主机处于正确偏航角。
15、与现有技术相比,本发明的有益效果是:
16、1、该无人机倾斜摄影测量偏航角自动纠偏机构及其使用方法,通过安装自纠偏组件,便于使得该无人机能够实现自动纠偏录像机角度使其调节合适的偏航角进行拍摄,有效解决了现有无人机倾斜摄影时由于航偏角问题导致后期拼接画面较困难的问题,在使用时的实用性更强,使用时更加灵活;
17、2、该无人机倾斜摄影测量偏航角自动纠偏机构及其使用方法,通过安装控制机构,便于使得该机构在实际使用时,能够在倾角水平传感器检测到摄像主机倾斜时,控制相对应的纠偏组件对摄像主机的偏航角角度进行调节,在使用时的实用性更强;
18、3、该无人机倾斜摄影测量偏航角自动纠偏机构及其使用方法,通过安装手动调节组件,便于在无人机机体起飞前,对摄像主机的初始摄像角度进行调控,增强摄像主机在使用时的实用性与灵活性。
技术特征:
1.一种无人机倾斜摄影测量偏航角自动纠偏机构,包括主体机构(1)和控制机构(2),其特征在于:所述控制机构(2)位于主体机构(1)的下方,所述主体机构(1)包括无人机主机体(101)、机翼架(102)和支撑脚(103),所述机翼架(102)固定安装在无人机主机体(101)的外端,所述支撑脚(103)固定安装在无人机主机体(101)的下端;
2.根据权利要求1所述的一种无人机倾斜摄影测量偏航角自动纠偏机构,其特征在于:所述手动调节组件(108)固定安装在固定板(107)的中部,所述自纠偏组件(109)活动安装在无人机主机体(101)的下方。
3.根据权利要求2所述的一种无人机倾斜摄影测量偏航角自动纠偏机构,其特征在于:所述手动调节组件(108)包括支撑轴承(1081)、旋转杆(1082)、支撑圈(1083)、对接板(1084)和调节杆(1085),所述支撑轴承(1081)固定安装在固定板(107)的中部,所述旋转杆(1082)旋转连接支撑轴承(1081)。
4.根据权利要求3所述的一种无人机倾斜摄影测量偏航角自动纠偏机构,其特征在于:所述支撑圈(1083)固定安装在旋转杆(1082)的外端,所述对接板(1084)固定安装在支撑圈(1083)下端的前后两端,所述调节杆(1085)旋转安装在对接板(1084)的中部。
5.根据权利要求4所述的一种无人机倾斜摄影测量偏航角自动纠偏机构,其特征在于:所述自纠偏组件(109)包括连接杆(1091)、凹形支撑板一(1092)、支撑杆一(1093)、电动推杆(1094)、凹形支撑板二(1095)和支撑杆二(1096),所述连接杆(1091)固定安装在旋转杆(1082)下端的左右两端,所述凹形支撑板一(1092)固定安装在连接杆(1091)的下端,所述支撑杆一(1093)旋转安装在凹形支撑板一(1092)的中部,所述电动推杆(1094)固定安装在支撑杆一(1093)的中部,所述电动推杆(1094)固定连接支撑杆一(1093),所述凹形支撑板二(1095)固定安装在摄影主机(104)的左右两端,所述支撑杆二(1096)旋转安装在凹形支撑板二(1095)的中部,所述电动推杆(1094)固定连接支撑杆二(1096),所述摄影主机(104)的上端固定连接调节杆(1085)。
6.根据权利要求5所述的一种无人机倾斜摄影测量偏航角自动纠偏机构,其特征在于:所述控制机构(2)包括控制器(201),所述控制器(201)固定安装在摄影主机(104)前端的右端,所述倾角水平传感器(106)电性连接控制器(201),所述控制器(201)电性连接电动推杆(1094)。
7.一种无人机倾斜摄影测量偏航角自动纠偏机构的使用方法,其特征在于:包括以下步骤:
技术总结
本发明涉及无人机偏航角纠偏技术领域,且公开了一种无人机倾斜摄影测量偏航角自动纠偏机构,包括主体机构和控制机构,所述控制机构位于主体机构的下方,所述主体机构包括无人机主机体、机翼架和支撑脚,所述机翼架固定安装在无人机主机体的外端,所述支撑脚固定安装在无人机主机体的下端;所述主体机构还包括摄影主机、摄像头、倾角水平传感器、固定板。该无人机倾斜摄影测量偏航角自动纠偏机构及其使用方法,通过安装自纠偏组件,便于使得该无人机能够实现自动纠偏录像机角度使其调节合适的偏航角进行拍摄,有效解决了现有无人机倾斜摄影时由于航偏角问题导致后期拼接画面较困难的问题,在使用时的实用性更强,使用时更加灵活。
技术研发人员:王艳,张抗抗,孙升,吴佳佳,陈泽,常浩东,文娟,顾金金,陈梦瑶,王玉婷,马慧雪
受保护的技术使用者:安徽建筑大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!