并联舵机装置及无人机的制作方法
本发明涉及无人机,具体而言,涉及一种并联舵机装置及无人机。
背景技术:
1、舵机是操作飞机舵面转动的一种执行部件。为了保证飞机舵面转动的可靠性,现有技术中采用并联舵机设计,即两个舵机均与飞机舵面机械连接。然而,当其中一个舵机出现故障时,另一个舵机虽然能够正常工作,但受到该故障舵机的影响,并联舵机系统将无法工作。
技术实现思路
1、本发明实施例提供一种并联舵机装置及无人机,以解决现有技术中存在的问题。
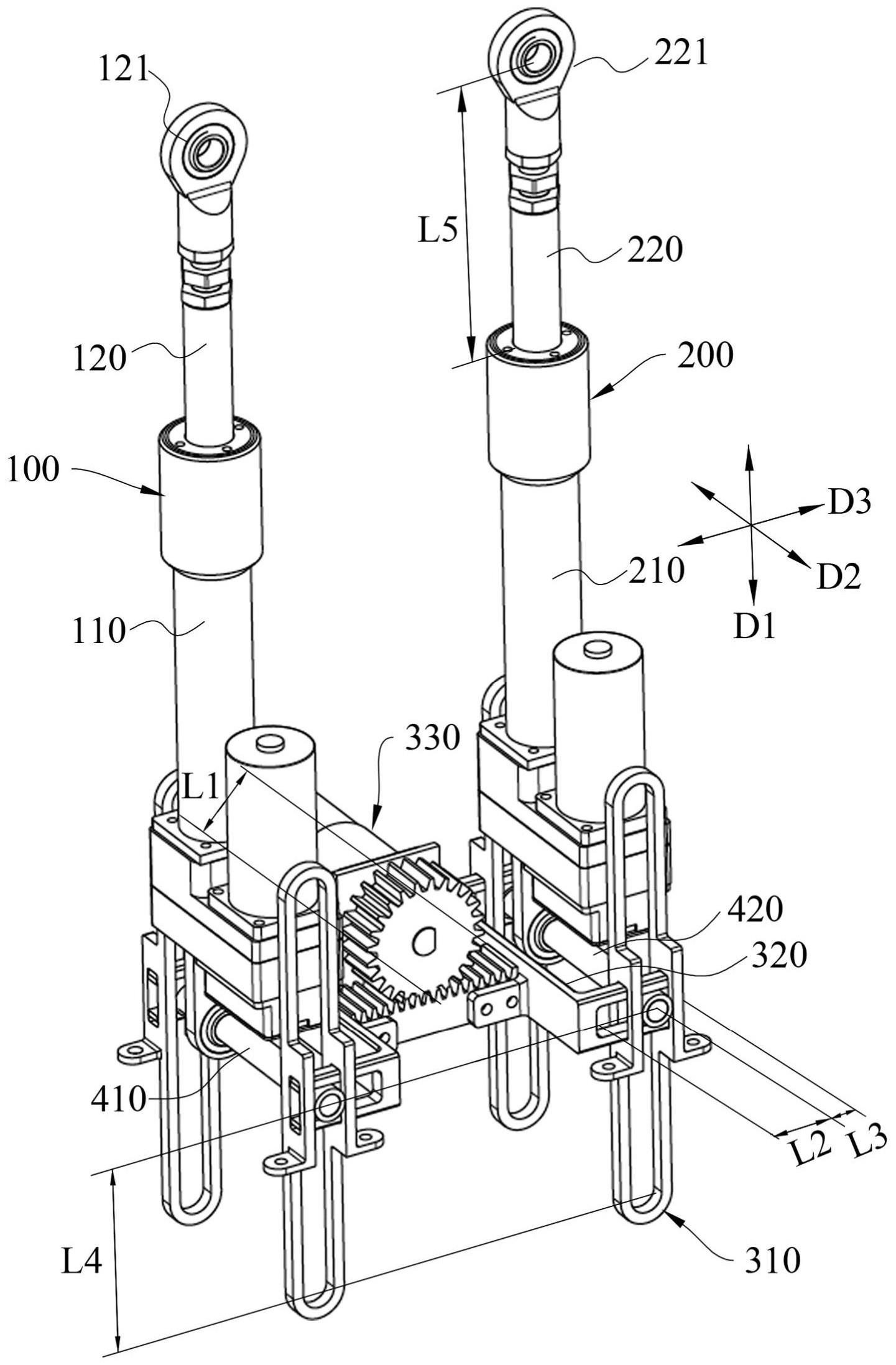
2、本发明实施例的并联舵机装置,包括第一舵机、第二舵机和隔离机构,第一舵机包括第一固定部和第一活动部,所述第一活动部可活动地连接于所述第一固定部;第二舵机包括第二固定部和第二活动部,所述第二活动部可活动地连接于所述第二固定部;隔离机构包括固定组件、锁定组件和驱动组件,所述第一固定部和所述第二固定部均可移动地连接于所述固定组件;所述锁定组件相对于所述第一固定部和所述第二固定部的位置包括锁定位置和释放位置;在所述锁定位置,所述锁定组件将所述第一固定部和所述第二固定部锁定在所述固定组件;在所述释放位置,所述第一固定部和所述第二固定部的其中一个被所述锁定组件锁定在所述固定组件,另一个相对于所述固定组件可移动;所述驱动组件与所述锁定组件连接,用于驱动所述锁定组件在所述锁定位置和所述释放位置之间移动。
3、根据本发明的一些实施方式,所述第一固定部相对于所述固定组件的移动方向与所述第一活动部相对于所述第一固定部的移动方向平行;
4、所述第二固定部相对于所述固定组件的移动方向与所述第二活动部相对于所述第二固定部的移动方向平行。
5、根据本发明的一些实施方式,所述第一活动部可伸缩地连接于所述第一固定部,所述第二活动部可伸缩地连接于所述第二固定部;或,
6、所述第一活动部可转动地连接于所述第一固定部,所述第二活动部可转动地连接于所述第二固定部。
7、根据本发明的一些实施方式,所述锁定组件在所述锁定位置和所述释放位置之间的移动路径为直线或曲线。
8、根据本发明的一些实施方式,所述固定组件设有第一滑槽和第二滑槽;
9、所述隔离机构还包括第一滑杆和第二滑杆,所述第一固定部与所述第一滑杆连接,所述第二固定部与所述第二滑杆连接;所述第一滑杆可滑动地穿设于所述第一滑槽,所述第二滑杆可滑动地穿设于所述第二滑槽;
10、在所述锁定位置,所述锁定组件将所述第一滑杆锁定在所述第一滑槽内以及将所述第二滑杆锁定在所述第二滑槽内;
11、在所述释放位置,所述锁定组件将所述第一滑杆和所述第二滑杆的其中一个锁定,而释放另一个。
12、根据本发明的一些实施方式,所述固定组件还包括与所述第一固定部对应的两个第一固定件以及与所述第二固定部对应的两个第二固定件,两个所述第一固定件分别位于所述第一固定部的相反两侧,两个所述第二固定件分别位于所述第二固定部的相反两侧;各所述第一固定件设有所述第一滑槽,各所述第二固定件设有所述第二滑槽;
13、所述第一滑杆的轴向方向的两端分别可滑动地设于两个所述第一滑槽内;所述第二滑杆的轴向方向的两端分别可滑动地设于两个所述第二滑槽内。
14、根据本发明的一些实施方式,所述锁定组件包括连接于所述驱动组件的第一锁定件和第二锁定件,所述第一锁定件用于锁定或释放所述第一滑杆,所述第二锁定件用于锁定或释放所述第二滑杆。
15、根据本发明的一些实施方式,所述驱动组件包括:
16、电机;
17、齿轮,与所述电机的输出轴连接;以及
18、齿条,与所述齿轮相啮合;所述齿条的长度方向的两端分别与所述第一锁定件和所述第二锁定件。
19、根据本发明的一些实施方式,所述齿条的移动方向与所述第一滑槽和所述第二滑槽的延伸方向垂直。
20、根据本发明的一些实施方式,所述固定组件还设有与所述第一滑槽对应的第一插孔以及与所述第二滑槽对应的第二插孔;
21、所述第一锁定件可移动地穿设于所述第一插孔,以锁定或释放所述第一滑杆,所述第二锁定件可移动地穿设于所述第二插孔,以锁定或释放所述第二滑杆。
22、根据本发明的一些实施方式,所述第一锁定件包括一对第一叉臂,所述第二锁定件包括一对第二叉臂;
23、在所述锁定位置,一对所述第一叉臂穿设于所述第一插孔内,且所述第一滑杆限位于一对所述第一叉臂之间,一对所述第二叉臂穿设于所述第二插孔内,且所述第二滑杆限位于一对所述第二叉臂之间。
24、根据本发明的一些实施方式,一对所述第一叉臂相互平行,一对所述第二叉臂相互平行。
25、根据本发明的一些实施方式,在所述释放位置,被释放的所述第一滑杆或所述第二滑杆从与之对应的一对所述叉臂之间脱出,被锁定的所述第一滑杆或所述第二滑杆仍保持在与之对应的一对所述叉臂之间。
26、本发明实施例的无人机,包括上述任一项所述的并联舵机装置。
27、上述发明中的一个实施例至少具有如下优点或有益效果:
28、本发明实施例的并联舵机装置,包括第一舵机、第二舵机和隔离机构,隔离机构的锁定组件能够在锁定位置和释放位置之间移动。其中,当锁定组件位于锁定位置时,锁定组件将第一固定部和第二固定部锁定在固定组件,这样第一舵机和第二舵机均能够参与工作。当锁定组件位于释放位置时,锁定组件将第一固定部和第二固定部的其中一个锁定在固定组件,而另一个相对于固定组件可移动,这样被锁定在固定组件的固定部对应的舵机能够继续工作,而相对于固定组件可移动的舵机能够随动于继续工作的舵机,如此当第一舵机和第二舵机其中一个舵机失效而无法工作时,另一个舵机仍能够继续工作,并不会受到失效舵机的影响,确保飞机操纵系统的正常工作,保证无人机的安全性。因此,本发明实施例的并联舵机装置,不仅通过设置两个舵机的方式对同一个舵面进行操作,以提高舵面操作可靠性,而且还通过设置隔离机构,以释放失效的舵机,避免该失效的舵机影响正常工作的舵机,进而确保舵面的正常运动。
技术特征:
1.一种并联舵机装置,其特征在于,包括:
2.根据权利要求1所述的并联舵机装置,其特征在于,所述第一固定部(110)相对于所述固定组件(310)的移动方向与所述第一活动部(120)相对于所述第一固定部(110)的移动方向平行;
3.根据权利要求2所述的并联舵机装置,其特征在于,所述第一活动部(120)可伸缩地连接于所述第一固定部(110),所述第二活动部(220)可伸缩地连接于所述第二固定部(210);或,
4.根据权利要求1所述的并联舵机装置,其特征在于,所述锁定组件(320)在所述锁定位置和所述释放位置之间的移动路径为直线或曲线。
5.根据权利要求1所述的并联舵机装置,其特征在于,所述固定组件(310)设有第一滑槽(311a)和第二滑槽(312a);
6.根据权利要求5所述的并联舵机装置,其特征在于,所述固定组件(310)还包括与所述第一固定部(110)对应的两个第一固定件(311)以及与所述第二固定部(210)对应的两个第二固定件(312),两个所述第一固定件(311)分别位于所述第一固定部(110)的相反两侧,两个所述第二固定件(312)分别位于所述第二固定部(210)的相反两侧;各所述第一固定件(311)设有所述第一滑槽(311a),各所述第二固定件(312)设有所述第二滑槽(312a);
7.根据权利要求5所述的并联舵机装置,其特征在于,所述锁定组件(320)包括连接于所述驱动组件(330)的第一锁定件(321)和第二锁定件(322),所述第一锁定件(321)用于锁定或释放所述第一滑杆(410),所述第二锁定件(322)用于锁定或释放所述第二滑杆(420)。
8.根据权利要求7所述的并联舵机装置,其特征在于,所述驱动组件(330)包括:
9.根据权利要求8所述的并联舵机装置,其特征在于,所述齿条(333)的移动方向与所述第一滑槽(311a)和所述第二滑槽(312a)的延伸方向垂直。
10.根据权利要求7所述的并联舵机装置,其特征在于,所述固定组件(310)还设有与所述第一滑槽(311a)对应的第一插孔(311b)以及与所述第二滑槽(312a)对应的第二插孔(312b);
11.根据权利要求10所述的并联舵机装置,其特征在于,所述第一锁定件(321)包括一对第一叉臂(321a),所述第二锁定件(322)包括一对第二叉臂(322a);
12.根据权利要求11所述的并联舵机装置,其特征在于,一对所述第一叉臂(321a)相互平行,一对所述第二叉臂(322a)相互平行。
13.根据权利要求11所述的并联舵机装置,其特征在于,在所述释放位置,被释放的所述第一滑杆(410)或所述第二滑杆(420)从与之对应的一对所述叉臂之间脱出,被锁定的所述第一滑杆(410)或所述第二滑杆(420)仍保持在与之对应的一对所述叉臂之间。
14.一种无人机,其特征在于,包括权利要求1至13任一项所述的并联舵机装置。
技术总结
本发明公开一种并联舵机装置及无人机,并联舵机装置包括第一舵机、第二舵机和隔离机构,第一舵机包括第一固定部和第一活动部,第一活动部可活动地连接于第一固定部;第二舵机包括第二固定部和第二活动部,第二活动部可活动地连接于第二固定部;隔离机构包括固定组件、锁定组件和驱动组件,两个固定部均可移动地连接于固定组件;锁定组件相对于第一固定部和第二固定部的位置包括锁定位置和释放位置;在锁定位置,锁定组件将第一固定部和第二固定部锁定在固定组件;在释放位置,两个固定部的其中一个被锁定组件锁定在固定组件,另一个相对于固定组件可移动;驱动组件与锁定组件连接,用于驱动锁定组件在锁定位置和释放位置之间移动。
技术研发人员:孙雪军,曲岩
受保护的技术使用者:西安京东天鸿科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!