一种大型空间可切换双模式回转支撑装置和飞行器的制作方法
本申请涉及大型空间对日定向装置的,特别是一种大型空间可切换双模式回转支撑装置。
背景技术:
1、大型空间对日定向装置是目前国内最大的对日定向驱动机构,其主要功能是满足空间大功率电传输,并承受机构桁架端柔性太阳翼发射段和在轨段的载荷,并驱动太阳翼长期在轨稳定转动。由于大型空间对日定向装置无论体积还是质量都较传统对日定向驱动机构大很多,因此很难实现整体在轨更换。其长期稳定运行的可靠性将直接影响空间大型飞行器的使用寿命,关于整个飞行器系统任务的成败。一旦发生故障失效,所引起的损失将不可估量。现有技术中,对日定向机构由于负载较小,可直接采用“电机+减速器+轴承+负载”的稳定可靠传动形式,轴承起回转支撑作用。而大型空间对日定向装置由于大负载和轻量化设计要求,因此“大轴承”方案因机构整体质量较大被舍弃。
技术实现思路
1、本发明的目的在于提供一种大型空间可切换双模式回转支撑装置,解决了现有技术中对日定向驱动机构承载能力小,质量代价大,在轨使用寿命短,无法实现单模式故障消除等技术问题。
2、第一方面,提供了一种大型空间可切换双模式回转支撑装置,包括:
3、舱体接口法兰,所述舱体接口法兰上设置有第一滚动支撑组件和第一切换锁定机构;
4、桁架接口法兰,所述桁架接口法兰上设置有第二滚动支撑组件和第二切换锁定机构,所述桁架接口法兰在主模式和备模式下均能够相对于所述舱体接口法兰旋转;
5、导轨,所述导轨设置于所述舱体接口法兰和所述桁架接口法兰之间,且与所述第一滚动支撑组件和所述第二滚动支撑组件配合,所述第一切换锁定机构用于在所述主模式下解锁所述导轨,在所述备模式下锁紧所述导轨,所述第二切换锁定机构用于在所述主模式下锁紧所述导轨,在所述备模式下解锁所述导轨。
6、结合第一方面,在第一方面的某些实现方式中,所述舱体接口法兰上设置有第一驱动组件,所述桁架接口法兰上设置有第二驱动组件;在所述主模式下,所述第一驱动组件用于驱动所述导轨旋转并带动所述桁架接口法兰旋转,在所述备模式下,所述第二驱动齿轮用于驱动所述桁架接口法兰旋转。
7、结合第一方面,在第一方面的某些实现方式中,所述第一驱动组件包括第一驱动齿轮,所述第二驱动组件包括第二驱动齿轮,所述导轨靠近所述舱体接口法兰的一侧设置有第一齿轮环,所述第一齿轮环与所述第一驱动齿轮啮合传动,所述导轨靠近所述桁架接口法兰的一侧设置有第二齿轮环,所述第二齿轮环与所述第二驱动齿轮啮合传动;
8、在所述主模式下,所述第一驱动齿轮执行自转运动,以驱动所述导轨旋转并带动所述桁架接口法兰旋转;
9、在所述备模式下,所述第二驱动齿轮执行自转运动,以驱动所述桁架接口法兰旋转。
10、结合第一方面,在第一方面的某些实现方式中,所述第一切换锁定机构包括第一锁紧臂、第二锁紧臂、电机驱动部分和主结构部分;
11、所述主结构部分设置于所述舱体接口法兰,并承载所述第一锁紧臂、第二锁紧臂和电机驱动部分;所述电机驱动部分用于驱动所述第一锁紧臂和/或第二锁紧臂相对于所述主结构部分偏转,以调整所述第一锁紧臂和第二锁紧臂的夹紧距离,使所述第一锁紧臂和第二锁紧臂夹紧所述导轨的两侧或执行对所述导轨的解锁。
12、结合第一方面,在第一方面的某些实现方式中,所述第一锁紧臂和所述第二锁紧臂均设置有锁紧片,所述第一锁紧臂的锁紧片和第二锁紧臂的锁紧片分别与导轨的外侧面和内侧面贴合或分离。
13、结合第一方面,在第一方面的某些实现方式中,所述第一锁紧臂和所述主体结构部分通过第一旋转支撑轴连接,所述第一锁紧臂可通过所述第一旋转支撑轴相对于所述主体结构部分旋转;所述第二锁紧臂和所述主体结构部分通过第二旋转支撑轴连接,所述第二锁紧臂可通过所述第二旋转支撑轴相对于所述主体结构部分旋转。
14、结合第一方面,在第一方面的某些实现方式中,所述第一滚动支撑组件包括第一夹持臂、第二夹持臂和底夹持臂,所述导轨包括内斜面、外斜面和底端面,所述第一夹持臂贴合所述内斜面,所述第二夹持臂贴合所述外斜面,所述底夹持臂贴合所述底端面,以使所述滚动支撑组件夹持所述导轨。
15、结合第一方面,在第一方面的某些实现方式中,所述舱体接口法兰上均匀布置有多个所述第一滚动支撑组件,所述桁架接口法兰上均匀布置有多个所述第二滚动支撑组件。
16、结合第一方面,在第一方面的某些实现方式中,多个所述第一滚动支撑组件和多个所述第二滚动支撑组件一一相对设置。
17、结合第一方面,在第一方面的某些实现方式中,所述舱体接口法兰上均匀布置有两个所述第一切换锁定机构,所述桁架接口法兰上均匀布置有两个所述第二切换锁定机构,两个所述第一切换锁定机构的连线相对于两个所述第二切换锁定机构的连线垂直。
18、结合第一方面,在第一方面的某些实现方式中,在所述主模式下,两个所述第二切换锁定机构中的至少一个锁紧所述导轨,在所述备模式下,两个所述第一切换锁定机构中的至少一个锁紧所述导轨。
19、第二方面,提供了一种飞行器,所述飞行器包括如上述第一方面中的任意一种实现方式中所述的大型空间可切换双模式回转支撑装置。
20、与现有技术相比,本申请提供的方案至少包括以下有益技术效果:
21、1、本发明实现了高承载回转支撑装置轻量化设计,解决了现有技术中采用大轴承作为回转支撑部件的方案中轴承质量过大的问题。本发明采用多套圆周均布的滚动支撑组件共同夹持导轨,在提供导轨回转自由度的同时承受舱体桁架端的载荷,相对于大轴承方案机构质量得到大幅降低。
22、2、本发明实现了回转支撑装置可切换双模式设计,解决了现有技术中回转支撑部件为机构单点的问题。本发明采用“主份滚动支撑组件+导轨”和“备份滚动支撑组件+导轨”的双模式机构设计,每个模式的功能相同,均相当于类似轴承的回转支撑功能,并通过在桁架接口法兰与导轨、舱体接口法兰与导轨间分别设置多套切换锁定机构,实现桁架接口法兰与导轨高刚性连接,舱体接口法兰与导轨高刚性连接的切换,从而实现双模式的自由切换。
23、3、本发明实现了回转支撑装置使用寿命的大幅提高,解决了现有技术中活动部件使用寿命有限,无法满足在轨长寿命需求的问题。本发明采用可切换双模式机构方案设计,相较于单模式,在理论上前者在轨寿命是后者的两倍,从而大幅提高了装置的在轨使用寿命。
24、4、本发明实现了部组套层面的冗余设计,进一步提高了回转支撑装置整体的可靠性,解决了现有技术中回转支撑部件无冗余备份的问题。本发明中主份滚动支撑组件设置有8套,且为可拆卸式设计,各套之间互为冗余设计,当其中一套发生故障,可以对其进行拆卸,装置正常功能不受影响。本发明在舱体接口法兰和桁架接口法兰处各设置有2套切换锁定机构,两套相互独立,互为备份,当其中一套机构性能下降时,可使用另一套机构来替代执行任务。
技术特征:
1.一种大型空间可切换双模式回转支撑装置,其特征在于,包括:
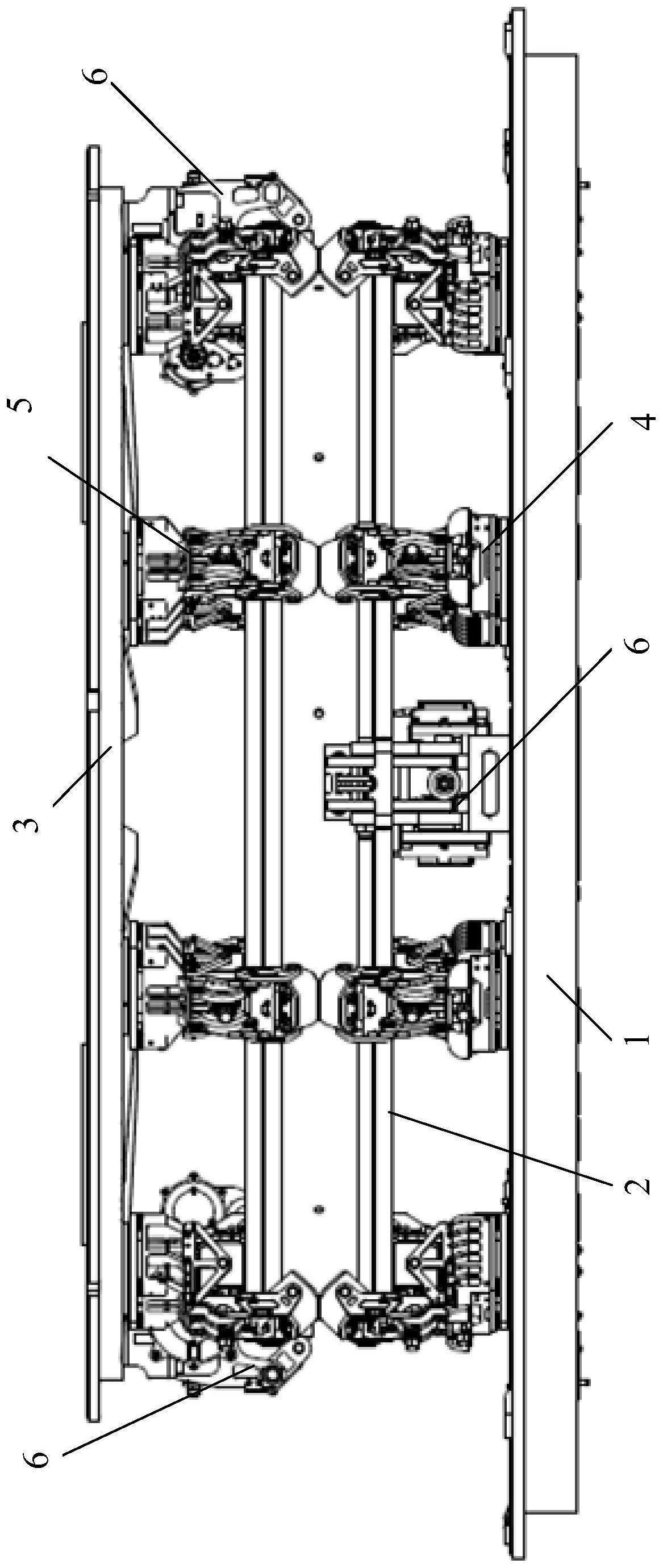
2.根据权利要求1所述的大型空间可切换双模式回转支撑装置,其特征在于,所述舱体接口法兰(1)上设置有第一驱动组件,所述桁架接口法兰(3)上设置有第二驱动组件;在所述主模式下,所述第一驱动组件用于驱动所述导轨(2)旋转并带动所述桁架接口法兰(3)旋转,在所述备模式下,所述第二驱动齿轮用于驱动所述桁架接口法兰(3)旋转。
3.根据权利要求2所述的大型空间可切换双模式回转支撑装置,其特征在于,所述第一驱动组件包括第一驱动齿轮,所述第二驱动组件包括第二驱动齿轮,所述导轨(2)靠近所述舱体接口法兰(1)的一侧设置有第一齿轮环(2-7),所述第一齿轮环(2-7)与所述第一驱动齿轮啮合传动,所述导轨(2)靠近所述桁架接口法兰(3)的一侧设置有第二齿轮环(2-8),所述第二齿轮环(2-8)与所述第二驱动齿轮啮合传动;
4.根据权利要求1所述的大型空间可切换双模式回转支撑装置,其特征在于,所述第一切换锁定机构(6)包括第一锁紧臂(6-1)、第二锁紧臂(6-2)、电机驱动部分(6-3)和主结构部分(6-4);
5.根据权利要求4所述的大型空间可切换双模式回转支撑装置,其特征在于,所述第一锁紧臂(6-1)和所述第二锁紧臂(6-2)均设置有锁紧片(6-6),所述第一锁紧臂(6-1)的锁紧片(6-6)和第二锁紧臂(6-2)的锁紧片(6-6)分别与导轨(2)的外侧面和内侧面贴合或分离。
6.根据权利要求4或5所述的大型空间可切换双模式回转支撑装置,其特征在于,所述第一锁紧臂(6-1)和所述主体结构部分通过第一旋转支撑轴连接,所述第一锁紧臂(6-1)可通过所述第一旋转支撑轴相对于所述主体结构部分旋转;所述第二锁紧臂(6-2)和所述主体结构部分通过第二旋转支撑轴连接,所述第二锁紧臂(6-2)可通过所述第二旋转支撑轴相对于所述主体结构部分旋转。
7.根据权利要求1所述的大型空间可切换双模式回转支撑装置,其特征在于,所述第一滚动支撑组件(4)包括第一夹持臂(4-5-3)、第二夹持臂(4-5-4)和底夹持臂(4-5-5),所述导轨(2)包括内斜面(2-3)、外斜面(2-4)和底端面(2-5),所述第一夹持臂(4-5-3)贴合所述内斜面(2-3),所述第二夹持臂(4-5-4)贴合所述外斜面(2-4),所述底夹持臂(4-5-5)贴合所述底端面(2-5),以使所述滚动支撑组件夹持所述导轨(2)。
8.根据权利要求1所述的大型空间可切换双模式回转支撑装置,其特征在于,所述舱体接口法兰(1)上均匀布置有多个所述第一滚动支撑组件(4),所述桁架接口法兰(3)上均匀布置有多个所述第二滚动支撑组件(5)。
9.根据权利要求8所述的大型空间可切换双模式回转支撑装置,其特征在于,多个所述第一滚动支撑组件(4)和多个所述第二滚动支撑组件(5)一一相对设置。
10.根据权利要求1所述的大型空间可切换双模式回转支撑装置,其特征在于,所述舱体接口法兰(1)上均匀布置有两个所述第一切换锁定机构,所述桁架接口法兰(3)上均匀布置有两个所述第二切换锁定机构,两个所述第一切换锁定机构的连线相对于两个所述第二切换锁定机构的连线垂直。
11.根据权利要求10所述的大型空间可切换双模式回转支撑装置,其特征在于,在所述主模式下,两个所述第二切换锁定机构中的至少一个锁紧所述导轨(2),在所述备模式下,两个所述第一切换锁定机构中的至少一个锁紧所述导轨(2)。
12.一种飞行器,其特征在于,所述飞行器包括如权利要求1至11中任一项所述的大型空间可切换双模式回转支撑装置。
技术总结
本发明公开了一种大型空间可切换双模式回转支撑装置和飞行器。可切换双模式回转支撑装置包括:舱体接口法兰,舱体接口法兰上设置有第一滚动支撑组件和第一切换锁定机构;桁架接口法兰,桁架接口法兰上设置有第二滚动支撑组件和第二切换锁定机构,桁架接口法兰在主模式和备模式下均能够相对于舱体接口法兰旋转;导轨,导轨设置于舱体接口法兰和桁架接口法兰之间,且与第一滚动支撑组件和第二滚动支撑组件配合,第一切换锁定机构用于在主模式下解锁导轨,在备模式下锁紧导轨,第二切换锁定机构用于在主模式下锁紧导轨,在备模式下解锁导轨。目的是解决对日定向驱动机构承载能力小,质量代价大,在轨使用寿命短,无法实现单模式故障消除等技术问题。
技术研发人员:杨德财,马志飞,钱志源,姜景明,于爽,刘承山,黄大兴,张凯,傅质彬,陈秀群,王治易
受保护的技术使用者:上海宇航系统工程研究所
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!