一种可变机翼及旋翼短舱的倾转旋翼系统及其控制方法
本发明涉及倾转旋翼飞行器,特别是涉及一种可变机翼及旋翼短舱的倾转旋翼系统及其控制方法。
背景技术:
1、倾转旋翼飞行器是一款兼具直升机(或多旋翼)和固定翼飞行器的新型飞行器,目前市面上大部分倾转旋翼机过渡态控制主要采用旋翼短舱单独倾转形式,少部分采用机翼-短舱共同倾转形式,其中旋翼短舱单独倾转形式在倾转旋翼机悬停状态时会发生典型的“喷泉现象”,即在机翼面产生负升力,而采用机翼-短舱共同倾转形式,在倾转旋翼机过渡状态时,气动舵面(机翼)及拉力矢量(旋翼短舱)转速同步无法实现差动控制,造成全机升力和推力在倾转过渡态无法精准控制,如遇极端气流条件下,易造成安全事故。
技术实现思路
1、本发明的目的是提供一种可变机翼及旋翼短舱的倾转旋翼系统及其控制方法,以实现机翼及旋翼短舱的单独控制,进而实现倾转过渡状态全机升力和推力的精准控制。
2、为实现上述目的,本发明提供了如下方案:
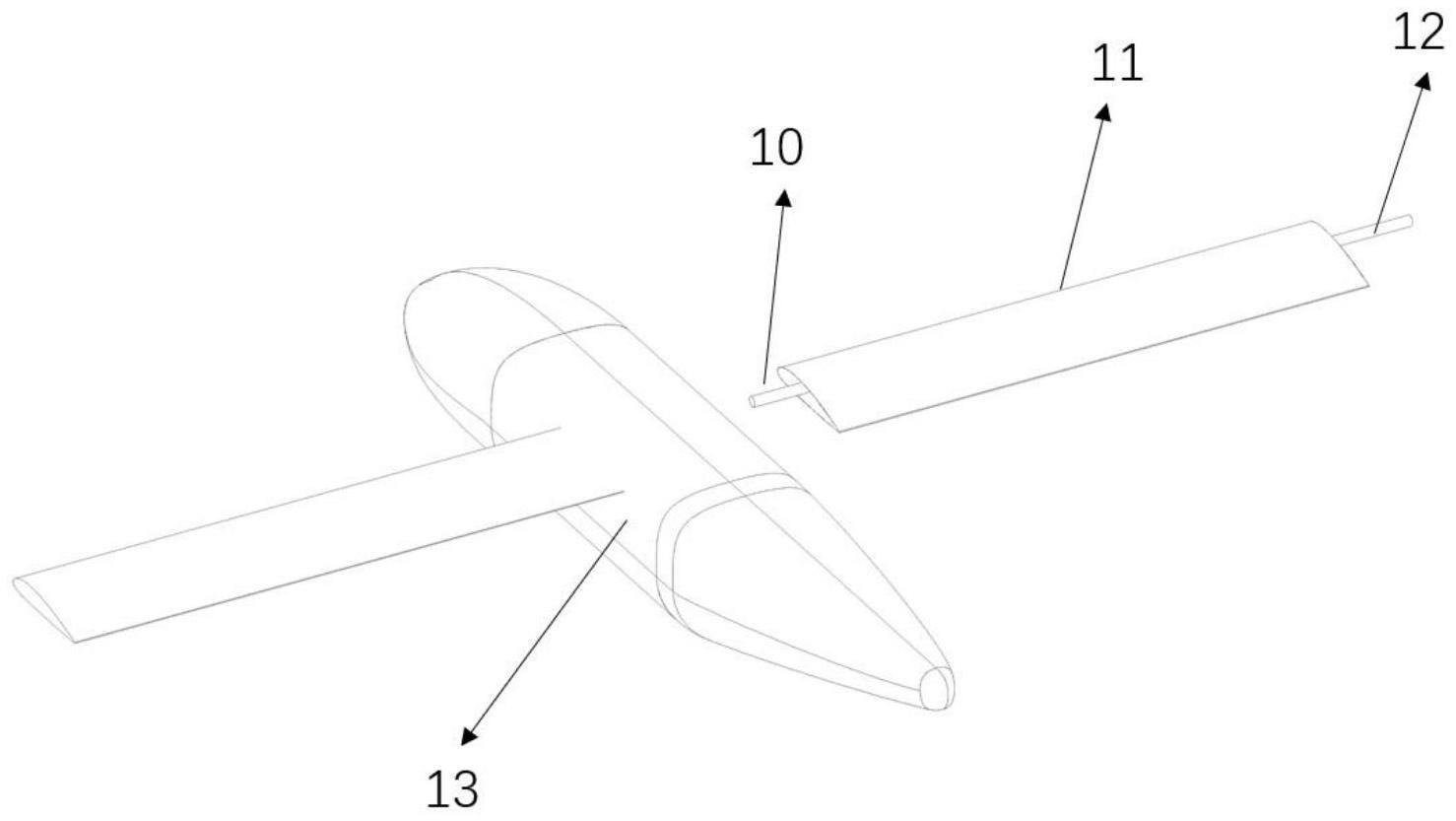
3、本发明提供一种可变机翼及旋翼短舱的倾转旋翼系统,所述倾转旋翼系统包括倾转旋翼飞行器,设置在倾转旋翼飞行器的机身与机翼的连接轴上的第一倾转装置,及设置在倾转旋翼飞行器的机翼与旋翼短舱的连接轴上的第二倾转装置;
4、所述第一倾转装置用于带动所述机翼相对于所述机身转动,所述第二倾转装置用于带动所述旋翼短舱相对于所述机翼转动。
5、可选的,所述第一倾转装置包括:电机控制器、驱动电机、蜗杆、涡轮和蜗轮轴;
6、所述电机控制器与所述驱动电机连接,所述电机控制器用于对所述驱动电机进行控制,所述驱动电机的输出轴与所述蜗杆连接,所述蜗杆与所述涡轮啮合,所述蜗轮轴的一端与所述涡轮轴连接,所述蜗轮轴的另一端和所述机身与机翼的连接轴连接。
7、可选的,所述第一倾转装置还包括:连杆、滑块和滑块槽;
8、所述连杆的一端设置在所述蜗轮轴上,所述连杆的另一端连接所述滑块;
9、所述滑块可滑动的设置在所述滑块槽内;
10、所述滑块槽内设置有滑块位置监测器,所述滑块位置监测器用于检测所述滑块在所述滑块槽内的位置,所述滑块位置监测器与所述电机控制器连接。
11、一种可变机翼及旋翼短舱的倾转旋翼系统的控制方法,所述控制方法包括如下步骤:
12、当接收到飞行控制系统发送的悬停-巡航转换的第一控制指令时,控制第一倾转装置的驱动电机以第一转速旋转,使机翼旋转至水平位置,控制第二倾转装置的驱动电机以第二转速旋转,使旋翼短舱旋转至30度位置,并检测倾转旋翼飞行器的飞行速度;所述第二转速小于所述第一转速;
13、当所述飞行速度达到第一预设速度阈值时或接收到飞行控制系统发送的悬停-巡航转换的第二控制指令时,控制第二倾转装置的驱动电机旋转,使旋翼短舱旋转至水平位置。
14、可选的,确定机翼旋转至水平位置的方式为:
15、基于设置在第一倾转装置的滑块槽内的滑块位置监测器,判断第一倾转装置的滑块是否到达第一倾转装置的滑块槽的最左端,当第一倾转装置的滑块到达第一倾转装置的滑块槽的最左端时,确定机翼旋转至水平位置。
16、可选的,确定旋翼短舱旋转至30度位置的方式为:
17、基于设置在第二倾转装置的滑块槽内的滑块位置监测器,判断第二倾转装置的滑块是否到达第二倾转装置的滑块槽的1/3位置,当第二倾转装置的滑块到达第二倾转装置的滑块槽的1/3位置时,确定旋翼短舱旋转至30度位置。
18、另一种可变机翼及旋翼短舱的倾转旋翼系统的控制方法,所述控制方法包括如下步骤:
19、当接收到飞行控制系统发送的巡航-悬停转换的第一控制指令时,控制第二倾转装置的驱动电机旋转,使旋翼短舱旋转至30度位置,并检测倾转旋翼飞行器的飞行速度;
20、当所述飞行速度达到第二预设速度阈值时或接收到飞行控制系统发送的巡航-悬停转换的第二控制指令时,控制第一倾转装置的驱动电机旋转,使机翼处于垂直位置,并控制第二倾转装置的驱动电机旋转,使旋翼短舱旋转至垂直位置。
21、可选的,确定旋翼短舱旋转至30度位置的方式为:
22、基于设置在第二倾转装置的滑块槽内的滑块位置监测器,判断第二倾转装置的滑块是否到达第二倾转装置的滑块槽的1/3位置,当第二倾转装置的滑块到达第二倾转装置的滑块槽的1/3位置时,确定旋翼短舱旋转至30度位置。
23、可选的,确定机翼处于垂直位置的方式为:
24、基于设置在第一倾转装置的滑块槽内的滑块位置监测器,判断第一倾转装置的滑块是否到达第一倾转装置的滑块槽的最右端,当第一倾转装置的滑块到达第一倾转装置的滑块槽的最右端时,确定机翼旋转至垂直位置。
25、可选的,确定旋翼短舱处于垂直位置的方式为:
26、基于设置在第二倾转装置的滑块槽内的滑块位置监测器,判断第二倾转装置的滑块是否到达第二倾转装置的滑块槽的最右端,当第二倾转装置的滑块到达第二倾转装置的滑块槽的最右端时,确定旋翼短舱旋转至垂直位置。
27、根据本发明提供的具体实施例,本发明公开了以下技术效果:
28、本发明实施例提供一种可变机翼及旋翼短舱的倾转旋翼系统及其控制方法,所述倾转旋翼系统包括倾转旋翼飞行器,设置在倾转旋翼飞行器的机身与机翼的连接轴上的第一倾转装置,及设置在倾转旋翼飞行器的机翼与旋翼短舱的连接轴上的第二倾转装置;所述第一倾转装置用于带动所述机翼相对于所述机身转动,所述第二倾转装置用于带动所述旋翼短舱相对于所述机翼转动。本发明通过在机身与机翼的连接轴上的第一倾转装置,在机翼与旋翼短舱的连接轴上的第二倾转装置,实现机翼及旋翼短舱的单独控制,进而实现倾转过渡状态全机升力和推力的精准控制。
技术特征:
1.一种可变机翼及旋翼短舱的倾转旋翼系统,其特征在于,所述倾转旋翼系统包括倾转旋翼飞行器,设置在倾转旋翼飞行器的机身与机翼的连接轴上的第一倾转装置,及设置在倾转旋翼飞行器的机翼与旋翼短舱的连接轴上的第二倾转装置;
2.根据权利要求1所述的可变机翼及旋翼短舱的倾转旋翼系统,其特征在于,所述第一倾转装置包括:电机控制器、驱动电机、蜗杆、涡轮和蜗轮轴;
3.根据权利要求2所述的可变机翼及旋翼短舱的倾转旋翼系统,其特征在于,所述第一倾转装置还包括:连杆、滑块和滑块槽;
4.一种权利要求1-3任一项所述的可变机翼及旋翼短舱的倾转旋翼系统的控制方法,其特征在于,所述控制方法包括如下步骤:
5.根据权利要求4所述的控制方法,其特征在于,确定机翼旋转至水平位置的方式为:
6.根据权利要求4所述的控制方法,其特征在于,确定旋翼短舱旋转至30度位置的方式为:
7.一种权利要求1-3任一项所述的可变机翼及旋翼短舱的倾转旋翼系统的控制方法,其特征在于,所述控制方法包括如下步骤:
8.根据权利要求7所述的控制方法,其特征在于,确定旋翼短舱旋转至30度位置的方式为:
9.根据权利要求7所述的控制方法,其特征在于,确定机翼处于垂直位置的方式为:
10.根据权利要求7所述的控制方法,其特征在于,确定旋翼短舱处于垂直位置的方式为:
技术总结
本发明公开一种可变机翼及旋翼短舱的倾转旋翼系统及其控制方法,所述倾转旋翼系统包括倾转旋翼飞行器,设置在倾转旋翼飞行器的机身与机翼的连接轴上的第一倾转装置,及设置在倾转旋翼飞行器的机翼与旋翼短舱的连接轴上的第二倾转装置;所述第一倾转装置用于带动所述机翼相对于所述机身转动,所述第二倾转装置用于带动所述旋翼短舱相对于所述机翼转动。本发明通过在机身与机翼的连接轴上的第一倾转装置,在机翼与旋翼短舱的连接轴上的第二倾转装置,实现机翼及旋翼短舱的单独控制,进而实现倾转过渡状态全机升力和推力的精准控制。
技术研发人员:张夏阳,招启军,管桐,苏金周,葛浩杰,陈希
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!