太阳角能源约束下的快速交会飞行方法和装置与流程
本发明实施例涉及交会对接,特别涉及一种太阳角能源约束下的快速交会飞行方法和装置。
背景技术:
1、由于在不同时刻下太阳与追踪航天器运行的轨道面的夹角,即太阳高度角不同。而现有快速交会飞行方法下追踪航天器大部分时间为对地0°姿态,且太阳帆板通常为单轴转动,那么如果追踪航天器入轨时所处的轨道面的太阳高度角较大,会导致太阳光对太阳帆板的侧向入射角较大,当大到一定程度时,将导致太阳帆板发电效率不足,无法满足追踪航天器能源需求。因此,在选择追踪航天器的交会对接任务发射窗口时,会受到太阳高度角的能源约束,导致追踪航天器的发射时间比较受局限,难以确保空间站运营阶段各种正常、应急任务的顺利实施。
2、因此,亟需一种新的太阳角能源约束下的快速交会飞行方法。
技术实现思路
1、为了解决传统快速交会飞行方法下追踪航天器发射窗口受太阳高度角能源约束的问题,本发明实施例提供了一种太阳角能源约束下的快速交会飞行方法和装置。
2、第一方面,本发明实施例提供了一种太阳角能源约束下的快速交会飞行方法,应用于追踪航天器的控制系统,所述方法包括:
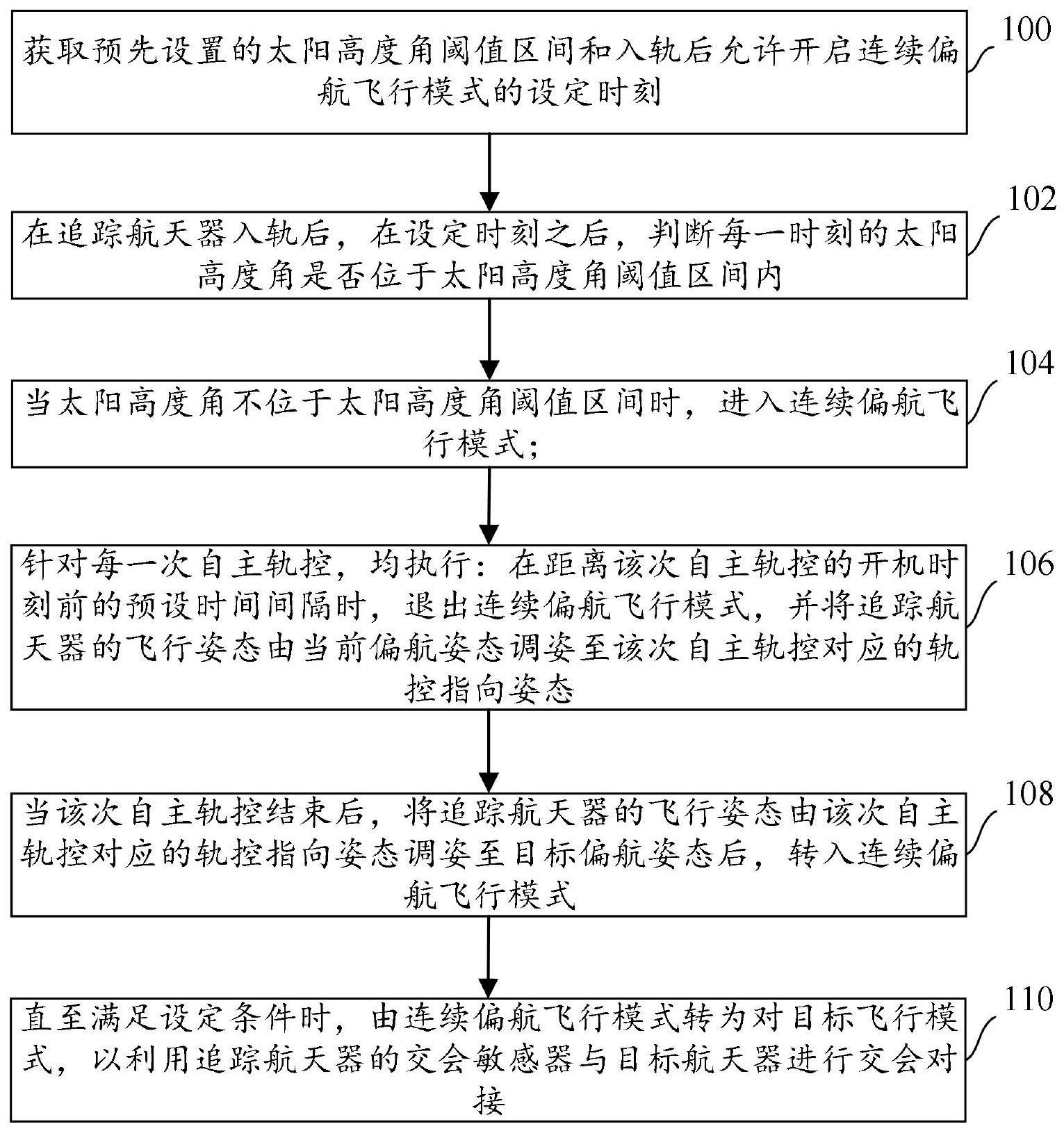
3、获取预先设置的太阳高度角阈值区间和入轨后允许开启连续偏航飞行模式的设定时刻;其中,所述连续偏航飞行模式用于实时调整所述追踪航天器的飞行姿态,以使所述追踪航天器的飞行姿态既满足测控条件,又满足能源条件;
4、在所述追踪航天器入轨后,在所述设定时刻之后,判断每一时刻的太阳高度角是否位于所述太阳高度角阈值区间内;
5、当所述太阳高度角不位于所述太阳高度角阈值区间时,进入连续偏航飞行模式;
6、针对每一次自主轨控,均执行:
7、在距离该次自主轨控的开机时刻前的预设时间间隔时,退出所述连续偏航飞行模式,并将所述追踪航天器的飞行姿态由当前偏航姿态调姿至该次自主轨控对应的轨控指向姿态;
8、当该次自主轨控结束后,将所述追踪航天器的飞行姿态由该次自主轨控对应的轨控指向姿态调姿至目标偏航姿态后,转入连续偏航飞行模式;所述目标偏航姿态是基于当前太阳矢量在追踪航天器轨道坐标系的飞行方向分量和面外分量得到的;
9、直至满足设定条件时,由连续偏航飞行模式转为对目标飞行模式,以利用所述追踪航天器的交会敏感器与目标航天器进行交会对接;其中,所述目标飞行模式为对地0°姿态飞行。
10、第二方面,本发明实施例还提供了一种太阳角能源约束下的快速交会飞行装置,设置于追踪航天器的控制系统,所述装置包括:
11、获取单元,用于获取预先设置的太阳高度角阈值区间和入轨后允许开启连续偏航飞行模式的设定时刻;其中,所述连续偏航飞行模式用于实时调整所述追踪航天器的飞行姿态,以使所述追踪航天器的飞行姿态既满足测控条件,又满足能源条件;
12、判断单元,用于在所述追踪航天器入轨后,在所述设定时刻之后,判断每一时刻的太阳高度角是否位于所述太阳高度角阈值区间内;
13、开启单元,用于当所述太阳高度角不位于所述太阳高度角阈值区间时,进入连续偏航飞行模式;
14、轨控准备单元,用于针对每一次自主轨控,均执行:在距离该次自主轨控的开机时刻前的预设时间间隔时,退出所述连续偏航飞行模式,并将所述追踪航天器的飞行姿态由当前偏航姿态调姿至该次自主轨控对应的轨控指向姿态;
15、轨控结束单元,用于当该次自主轨控结束后,将所述追踪航天器的飞行姿态由该次自主轨控对应的轨控指向姿态调姿至目标偏航姿态后,转入连续偏航飞行模式;所述目标偏航姿态是基于当前太阳矢量在追踪航天器轨道坐标系的飞行方向分量和面外分量得到的;
16、交会单元,用于直至满足设定条件时,由连续偏航飞行模式转为对目标飞行模式,以利用所述追踪航天器的交会敏感器与目标航天器进行交会对接;其中,所述目标飞行模式为对地0°姿态飞行。
17、第三方面,本发明实施例还提供了一种计算设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序时,实现本说明书任一实施例所述的方法。
18、第四方面,本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序在计算机中执行时,令计算机执行本说明书任一实施例所述的方法。
19、本发明实施例提供了一种太阳角能源约束下的快速交会飞行方法和装置,首先,获取预先设置的太阳高度角阈值区间和入轨后允许开启连续偏航飞行模式的设定时刻;其中,连续偏航飞行模式用于实时调整追踪航天器的飞行姿态,以使追踪航天器的飞行姿态既满足测控条件,又满足能源条件;那么,在追踪航天器入轨后的设定时刻之后,判断每一时刻的太阳高度角是否位于太阳高度角阈值区间内;当太阳高度角不位于太阳高度角阈值区间时,进入连续偏航飞行模式;并且在每一次自主轨控时,均执行:在距离该次自主轨控的开机时刻前的预设时间间隔时,退出连续偏航飞行模式,并将追踪航天器的飞行姿态由当前偏航姿态调姿至该次自主轨控对应的轨控指向姿态;当该次自主轨控结束后,将追踪航天器的飞行姿态由该次自主轨控对应的轨控指向姿态调姿至目标偏航姿态后,转入连续偏航飞行模式;直至满足设定条件时,由连续偏航飞行模式转为对目标飞行模式,以利用追踪航天器的交会敏感器与目标航天器进行交会对接。本方案,在入轨后允许开启连续偏航飞行模式的设定时刻后,当太阳高度角位于太阳高度角阈值区间时,使追踪航天器以对地0°姿态飞行,当太阳高度角超出太阳高度角阈值区间后,切换为连续偏航飞行模式,只有在最后交会对接和每一次自主轨控时分别切换为对地0°姿态和轨控指向姿态,其余时候均使用连续偏航飞行模式,而连续偏航飞行模式是通过实时调整追踪航天器的飞行姿态,使追踪航天器的飞行姿态既满足测控条件,又满足能源条件,以此来消除追踪航天器的发射窗口受太阳高度角能源约束的问题,以使追踪航天器的可发射时间大大增加,以使空间站运营阶段各种正常、应急任务可以顺利实施。
技术特征:
1.一种太阳角能源约束下的快速交会飞行方法,其特征在于,应用于追踪航天器的控制系统,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,太阳高度角阈值区间是通过如下公式计算的:
3.根据权利要求1所述的方法,其特征在于,所述设定时刻是基于所述追踪航天器的入轨时刻、所述追踪航天器入轨后执行关键动作所需的时间确定的;其中,所述关键动作包括消除入轨误差、太阳帆板展开、平台确认状态。
4.根据权利要求1所述的方法,其特征在于,所述连续偏航飞行模式下,所述追踪航天器的飞行姿态满足测控条件是指使所述追踪航天器的滚动角和俯仰角始终为0;所述追踪航天器的飞行姿态满足能源条件是指使所述追踪航天器的太阳帆板的转动方向与太阳矢量方向垂直,以使所述太阳帆板在任何太阳高度角下均正对太阳。
5.根据权利要求4所述的方法,其特征在于,所述连续偏航飞行模式下,所述追踪航天器的飞行姿态满足能源条件是指控制所述追踪航天器的偏航角始终为目标偏航角;
6.根据权利要求1所述的方法,其特征在于,每一次自主轨控开机时刻前的预设时间间隔是通过如下公式确定的:
7.根据权利要求1-6中任一项所述的方法,其特征在于,所述设定条件为:此时能量平衡坚持时间大于剩余任务飞行时间,且此时所述追踪航天器与目标航天器的距离小于所述追踪航天器的交会敏感器的工作距离。
8.一种太阳角能源约束下的快速交会飞行装置,其特征在于,设置于追踪航天器的控制系统,所述装置包括:
9.一种计算设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序时,实现如权利要求1-7中任一项所述的方法。
10.一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序在计算机中执行时,令计算机执行权利要求1-7中任一项所述的方法。
技术总结
本发明涉及交会对接技术领域,特别涉及一种太阳角能源约束下的快速交会飞行方法和装置。方法包括:在追踪航天器入轨后的设定时刻之后,当太阳高度角不位于太阳高度角阈值区间时,进入连续偏航飞行模式;针对每一次自主轨控均执行:在距离该次自主轨控的开机时刻前的预设时间间隔,退出连续偏航飞行模式,并将追踪航天器的飞行姿态由当前偏航姿态调姿至该次自主轨控的轨控指向姿态;当该次自主轨控结束后,将追踪航天器的飞行姿态由该次自主轨控对应的轨控指向姿态调姿至目标偏航姿态后,转入连续偏航飞行模式;直至满足设定条件时,由连续偏航飞行模式转为对目标飞行模式进行交会对接。本方案,可以使追踪航天器的可发射时间大大增加。
技术研发人员:张昊,李志宇,张一,解永春,胡军
受保护的技术使用者:北京控制工程研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!