一种非接触式旋翼椎体测试方法与流程
本发明属于直升机健康管理,具体涉及一种非接触式旋翼椎体测试方法。
背景技术:
1、直升机桨叶旋转为直升机提供动力,旋翼桨叶旋转且挥舞时会形成倒椎体,椎顶点在旋转轴上,锥面是桨叶的旋转轨迹面,椎底是桨尖轨迹面,旋翼椎体的倾斜方向基本上代表着旋翼启动合力的方向,如果旋翼桨叶中的一片和几片不同椎的话,则称为脱椎现象,会引起直升机振动。振动超限会导致直升机故障,影响直升机使用安全。因此需对直升机桨叶状态进行监测,为桨叶高度调整提供数据支撑。
2、早期采用竹竿、照相机、频闪仪等测量方法测量桨叶挥舞高度,测量精度较低且不易操作。
技术实现思路
1、有鉴于此,本发明提供一种非接触式旋翼椎体测试方法,能够实现桨叶挥舞高度的快速精准测量。
2、为了实现上述技术目的,本发明所采用的具体技术方案为:
3、一种非接触式旋翼椎体测试方法,用于非接触式测量桨叶挥舞高度;所述非接触式旋翼椎体测试方法包括以下步骤:
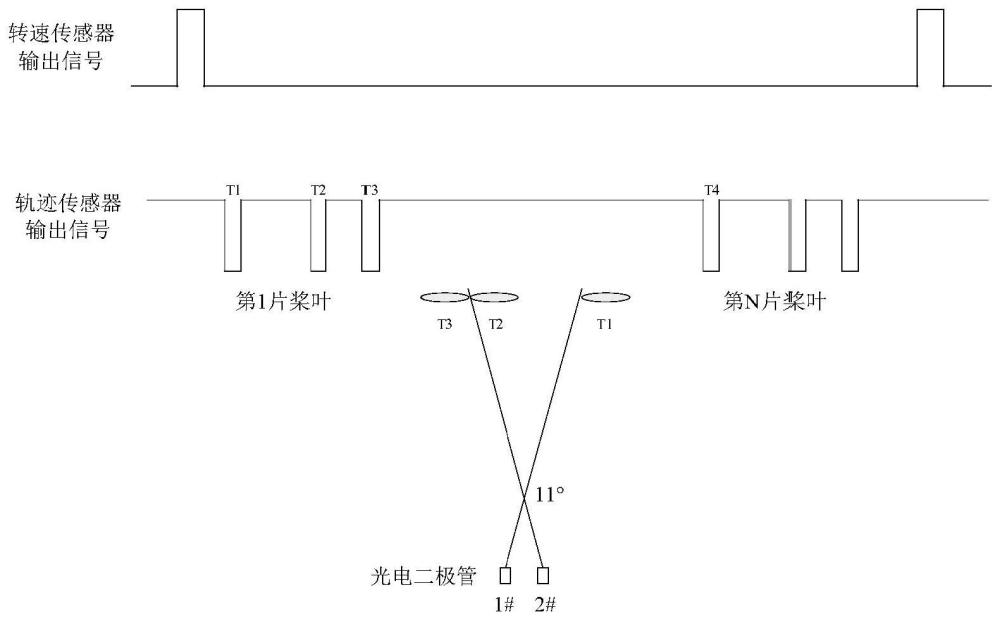
4、s101:设置与桨叶所安装的转轴的中轴位置相对固定的两个光电二极管,两个所述二极管的测量光路交叉;基于两个所述光电二极管照射旋转中的各所述桨叶,得到测量后的光信号;
5、s102:将所述光信号转换为电信号并执行调理,得到方波信号;
6、s103:检测出所述方波信号的各上升沿信号,得到各上升沿信号之间的时间差;
7、s104:基于所述桨叶的旋转特征及所述时间差计算得出桨叶的挥舞高度以及各桨叶之间的高度差。
8、进一步的,所述光信号基于信号调理电路进行调理,所述信号调理电路包括前置放大电路、二级放大电路、方波时钟电路以及单稳态触发电路;
9、所述前置放大电路采用t型反馈网络,用于实现1-v转换;
10、所述二级放大电路为基于通用放大器设计的方向放大电路;
11、所述方波时钟电路为基于比较器设计的滞回比较电路,通过调整反馈电阻调整滞回阈值;
12、所述前置放大电路采用t型反馈网络,将光电二极管的输出电流信号转换为电压信号,之后基于二级放大电路放大电压信号的信号幅值,方波时钟电路将输出信号调理为方波信号,单稳态触发电路在第一路光电二极管的上升沿输出方波信号,在第二路光电二极管的上升沿及下降沿输出方波信号。
13、进一步的,所述时间差基于滞回比较电路及可编程逻辑器件得到;所述滞回比较电路对所述方波信号进行调理,输出到可编程逻辑器件,可编程逻辑器件检测到方波信号上升沿时,记录当前时刻。
14、进一步的,所述旋转特征基于转速传感器探测所述桨叶得到;桨叶旋转一周,所述转速传感器输出一个脉冲信号,经调理电路后输出方波信号到可编程逻辑器件,可编程逻辑器件检测到方波信号上升沿时,记录当前时刻;
15、所述挥舞高度及高度差基于数据处理模块计算得到;所述数据处理模块结合所述桨叶的转速信号,连续获取多个周期采集数据,剔除异常点数据,通过计算各组信号上升沿时间差,计算各桨叶的挥舞高度和桨叶之间的高度差。
16、进一步的,两个所述测量光路之间的夹角为11°。
17、进一步的,所述桨叶的绝对挥舞h的表达式为:
18、
19、其中,
20、h0:光电二极管安装位置到桨叶旋转平面的垂直距离;
21、l0:光电二极管安装位置到旋翼主轴的水平距离;
22、α:光电二极管的安装角;
23、11°:两个测量光路之间的夹角;
24、r:沿桨叶方向,从桨毂到桨叶靶标的距离;
25、β:交叉的测量光路组成的平面与主轴之间的夹角;
26、r:沿桨叶方向,从桨毂到测量光路探测点的距离。
27、采用上述技术方案,本发明能够带来以下有益效果:
28、通过夹角为11°的两个光电二极管检测桨叶轨迹信号,光电二极管输出电信号经信号调理电路,输出方波信号,信号采集电路对方波上升沿进行检测,采集各上升沿时刻。结合采集桨叶转速信号,通过计算各上升沿时间差,计算各桨叶的挥舞高度和桨叶之间的高度差,实现了对桨叶的非接触式测量,能够提高测试效率及测试精度。
技术特征:
1.一种非接触式旋翼椎体测试方法,其特征在于,用于非接触式测量桨叶挥舞高度;所述非接触式旋翼椎体测试方法包括以下步骤:
2.根据权利要求1所述的非接触式旋翼椎体测试方法,其特征在于,所述光信号基于信号调理电路进行调理,所述信号调理电路包括前置放大电路、二级放大电路、方波时钟电路以及单稳态触发电路;
3.根据权利要求2所述的非接触式旋翼椎体测试方法,其特征在于,所述时间差基于滞回比较电路及可编程逻辑器件得到;所述滞回比较电路对所述方波信号进行调理,输出到可编程逻辑器件,可编程逻辑器件检测到方波信号上升沿时,记录当前时刻。
4.根据权利要求3所述的非接触式旋翼椎体测试方法,其特征在于,所述旋转特征基于转速传感器探测所述桨叶得到;桨叶旋转一周,所述转速传感器输出一个脉冲信号,经调理电路后输出方波信号到可编程逻辑器件,可编程逻辑器件检测到方波信号上升沿时,记录当前时刻;
5.根据权利要求1所述的非接触式旋翼椎体测试方法,其特征在于,两个所述测量光路之间的夹角为11°。
6.根据权利要求5所述的非接触式旋翼椎体测试方法,其特征在于,所述桨叶的绝对挥舞h的表达式为:
技术总结
本发明属于直升机健康管理技术领域,具体涉及一种非接触式旋翼椎体测试方法,通过具有夹角为的两个光电二极管检测桨叶轨迹信号,光电二极管输出电信号经信号调理输出方波信号,之后方波上升沿进行检测,采集各上升沿时刻;之后结合采集桨叶转速信号,通过计算各上升沿时间差,计算各桨叶的挥舞高度和桨叶之间的高度差,实现了对桨叶的非接触式测量,能够提高测试效率及测试精度。
技术研发人员:宋恒,薛森杰,张珣,李亚杯
受保护的技术使用者:陕西千山航空电子有限责任公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!