一种无人机智能移动机场及其自动升降平台的制作方法
本发明涉及无人机,具体涉及一种无人机智能移动机场及其自动升降平台。
背景技术:
1、无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。无人机实际上是无人驾驶飞行器的统称,具有体积小、造价低、使用方便、对应用环境要求低、环境适应性较强等优点,被广泛应用于航拍、物资运输、电力巡检、灾难救援等领域。
2、目前,为保证无人机起降稳定,常常利用停机平台或借助带有停机平台的无人机库来执行无人机的起降操作,但是,现有的停机平台和无人机库均各有优劣。停机平台的便携性较佳,需要的安装空间较小,但功能单一,在使用时需要额外安装,自动化程度较低,稳定性不佳;无人机库的功能相对丰富,现有的无人机库大多能够电动控制停机平台,结构运作较为稳定,但是需要的安装及运作空间较大,自动化程度一般;并且,可容纳的无人机数量较少;存在较大优化空间。
技术实现思路
1、本发明意在提供一种无人机智能移动机场及其自动升降平台,能够智能搭载多架无人机,且结构设置紧凑,空间利用率高,自动化程度高。
2、为达到上述目的,本发明提供的基础方案为:
3、方案一
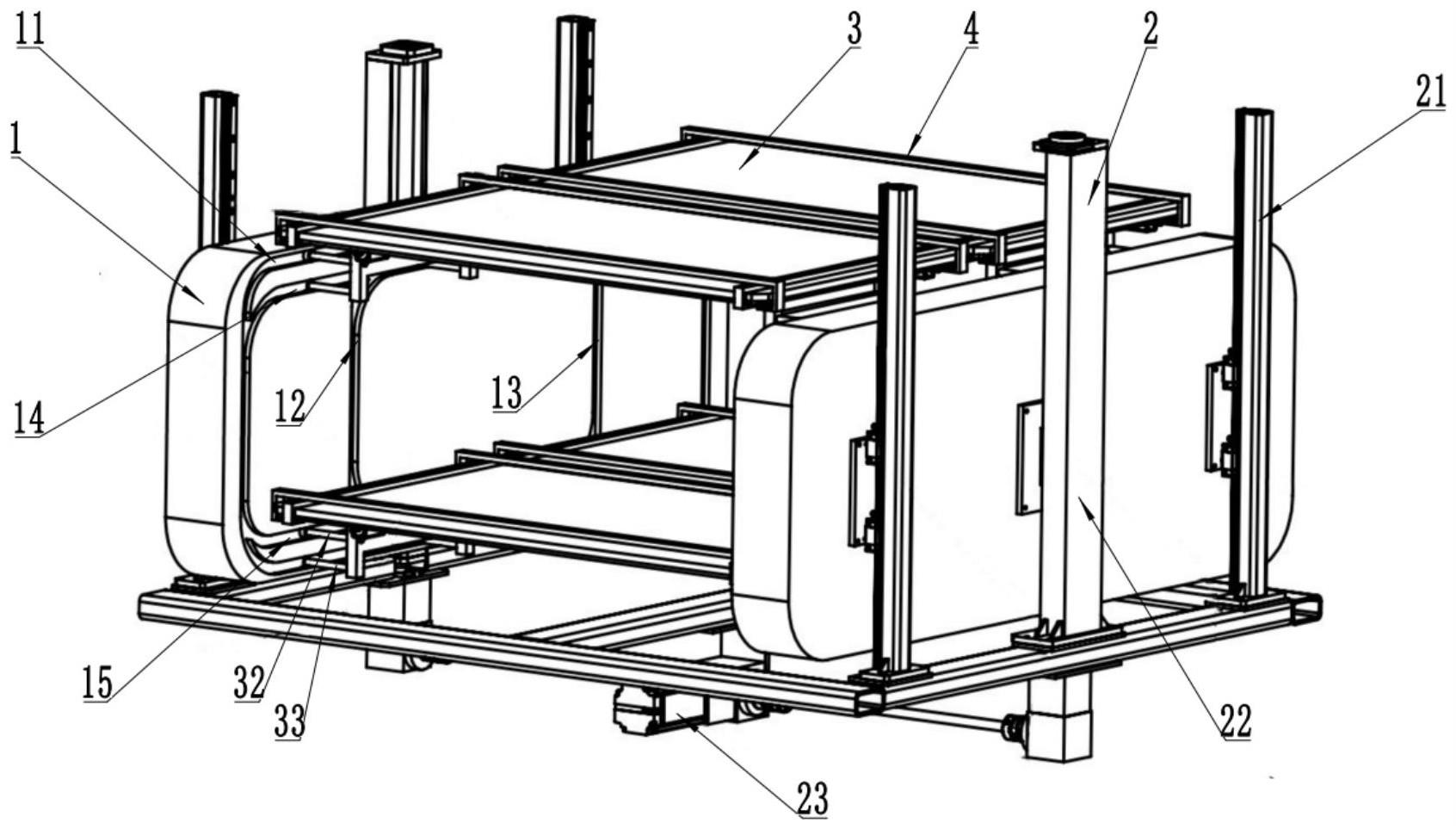
4、一种无人机自动升降平台,包括停机平台和移动系统;所述移动系统包括旋转子系统;所述旋转子系统包括相对设置的左旋转机构和右旋转机构,且两旋转机构的相对面上均设有回转轨道和移动轨道;所述回转轨道为四方形轨道,所述移动轨道为竖向轨道且与回转轨道的上轨道部和下轨道部同时连通;两旋转机构内部均设有用于驱动回转轨道转动的驱动控制机构;
5、所述停机平台设有数个,停机平台底部的两端处均设有轴承组,所述轴承组包括相隔一预设距离的两个轴承;所述预设距离等于移动轨道与回转轨道的左轨道部或右轨道部的间隔距离;两端处的轴承组分别与左旋转机构上的回转轨道和右旋转机构上的回转轨道相连;所述回转轨道转动时,带动轴承组一起移动。
6、方案二
7、一种无人机智能移动机场,包括相连接的驾驶室和车厢;所述车厢内设有如方案一所述的一种无人机自动升降平台;所述车厢内还设有机场控制舱;所述车厢顶部设有与无人机自动升降平台对应的伸缩门;所述机场控制舱内设有移动控制模块;所述移动控制模块与无人机自动升降平台和伸缩门均建立控制连接。
8、本发明的工作原理及优点在于:此处仅以设置两个停机平台为例,两个停机平台可分设于回转轨道的上轨道部和下轨道部,形成上下两层式的停机空间。两个停机平台上均可搭载1架无人机。在需要派飞无人机时,处于上层停机空间的停机平台上的无人机可直接派飞。再驱动回转轨道转动,通过轴承组带动停机平台参与轮转。当初始处于上层的停机平台轮转至其轴承组的两个轴承分别处于回转轨道的左(右)轨道部和一竖向轨道处时,初始处于下层的停机平台也轮转至其轴承组的两个轴承分别处于回转轨道的右(左)轨道部和一竖向轨道处;进一步地,停机平台继续轮转,初始处于上层的停机平台下移,初始处于下层的停机平台上移,此时,两个停机平台均有一轴承处于一竖向轨道中。停机平台继续轮转,直至完成上下层停机平台的交换。进而,初始处于下层停机空间的停机平台上的无人机也可完成派飞。
9、并且,无人机自动升降平台搭载在车厢中,无人机智能移动机场可携带数架无人机出行,以前往目标地点完成无人机的自动派飞。在派飞时,由移动控制模块控制伸缩门自动启闭,并控制无人机自动升降平台进行停机平台的轮换,完成多架无人机的派飞。并且,无人机升降平台也可为无人机提供多个停机位。
10、本方案提供的一种无人机智能移动机场及其自动升降平台,能够同时为多架无人机提供停机平台,承载量较大,移动机场可通过控制伸缩门和自动升降平台,完成多架无人机的起降,自动化程度较高。并且,由于数个停机平台构成叠加式的停机坪空间,所需占用的空间面积较小,所需的安装空间较小;上下层的停机平台轮换时,停机平台仅延伸出约半个停机平台身位,所需的运作空间也较小。整体结构设置紧凑,上下层的停机平台位置可灵活轮换,操作方便,有助于提升无人机的派飞、回收效率。升降平台自身能够便携搭载于如车厢等中小型空间中,适用范围较广。
技术特征:
1.一种无人机自动升降平台,其特征在于,包括停机平台和移动系统;所述移动系统包括旋转子系统;所述旋转子系统包括相对设置的左旋转机构和右旋转机构,且两旋转机构的相对面上均设有回转轨道和移动轨道;所述回转轨道为四方形轨道,所述移动轨道为竖向轨道且与回转轨道的上轨道部和下轨道部同时连通;两旋转机构内部均设有用于驱动回转轨道转动的驱动控制机构;
2.根据权利要求1所述的一种无人机自动升降平台,其特征在于,所述移动系统还包括升降子系统;所述升降子系统包括相对设置的,且对应设于左旋转机构一侧和右旋转机构一侧的左升降机构和右升降机构;所述左升降机构和右升降机构均包括直线导轨和升降驱动机构;两旋转机构的相背面上均设有与直线导轨滑动连接的定位滑块,以及与升降驱动机构的驱动部连接的转接部;所述驱动部用于通过转接部带动旋转机构上下移动。
3.根据权利要求1所述的一种无人机自动升降平台,其特征在于,所述移动轨道包括靠近回转轨道的左轨道部的第一移动轨道和靠近回转轨道的右轨道部的第二移动轨道;所述第一移动轨道与回转轨道的左轨道部的间隔,等于第二移动轨道与回转轨道的右轨道部的间隔,且等于预设距离。
4.根据权利要求3所述的一种无人机自动升降平台,其特征在于,所述停机平台设有四个;且在初始状态下,两个停机平台的轴承组对应位于回转轨道的上轨道部;另两个停机平台的轴承组对应位于回转轨道的下轨道部。
5.根据权利要求1所述的一种无人机自动升降平台,其特征在于,所述停机平台底部还设有导向支架;所述轴承组设置在导向支架上。
6.根据权利要求1所述的一种无人机自动升降平台,其特征在于,所述停机平台上还设有归中机构;所述归中机构包括x向归中机构和y向归中机构;所述x向归中机构用于沿y向归中夹紧无人机;所述y向归中机构用于沿x向归中夹紧无人机。
7.一种无人机智能移动机场,其特征在于,包括相连接的驾驶室和车厢;所述车厢内设有如权利要求1-6任一项所述的一种无人机自动升降平台;所述车厢内还设有机场控制舱;所述车厢顶部设有与无人机自动升降平台对应的伸缩门;所述机场控制舱内设有移动控制模块;所述移动控制模块与无人机自动升降平台和伸缩门均建立控制连接。
8.根据权利要求7所述的一种无人机智能移动机场,其特征在于,所述车厢顶部还设置有云台监控气象站;所述车厢的两侧面和背部均设有开合门;车厢内还设有显示屏,所述显示屏位于无人机自动升降平台侧边,且与一开合门相对。
9.根据权利要求7所述的一种无人机智能移动机场,其特征在于,所述车厢内部分设为操控区和设备区;所述无人机自动升降平台和机场控制舱均设于设备区;所述操控区内设有操控台和数据处理显示屏。
10.根据权利要求9所述的一种无人机智能移动机场,其特征在于,所述设备区内还设有电源舱;所述电源舱设于无人机自动升降平台下方,所述电源舱上开设有数个用于无人机电源充电的充电口,且充电口朝向开合门。
技术总结
本发明涉及无人机技术领域,公开了一种无人机智能移动机场及其自动升降平台,包括停机平台和移动系统;移动系统包括旋转子系统;旋转子系统包括相对设置的左旋转机构和右旋转机构,且两旋转机构的相对面上均设有回转轨道和移动轨道;旋转机构内部设有用于驱动回转轨道转动的驱动控制机构;停机平台设有数个,停机平台底部的两端处均设有轴承组,所述轴承组包括相隔一预设距离的两个轴承;两端处的轴承组分别与左旋转机构上的回转轨道和右旋转机构上的回转轨道相连;回转轨道转动时,带动轴承组一起移动。本发明能够智能搭载多架无人机,且结构设置紧凑,空间利用率高,自动化程度高。
技术研发人员:杜永永,冉启华,赵金龙,熊杰,李倩竹,朱国光,张博洲,黄宇航,赵志浩,孙永谦,张政新,韩翔宇,阚光强,方铖,刘健,黄佳睿
受保护的技术使用者:国网四川省电力公司成都供电公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!