一种无人机巡检系统的制作方法
本发明涉及线路巡检,尤其涉及一种无人机巡检系统。
背景技术:
1、现有的无人机巡检系统包括无人机和设置在电力塔上的机巢,无人机外出巡检完成后,飞回机巢进行充电,以备下次巡检。现有的机巢通过支架固定在电力塔上。现有的电力塔包括四根钢柱,四根钢柱呈矩阵分布并下端固定在地面上,钢柱之间固定连接有若干斜撑,且钢柱之间从下至上依次固定连接有若干横档。现有的支架的一端通过螺栓固定在横档上,支架的另一端向电力塔的一侧延伸而悬空。机巢设置在支架悬空的一端,以防无人机起降时和电力塔产生干涉。
2、现有的无人机巡检系统的机巢固定在支架的悬空端,当出现大风天气时,机巢容易上下晃动,长此以往,机巢内的无人机容易损坏,且机巢容易从支架上掉落,引发安全事故。
技术实现思路
1、本发明为了解决现有的无人机巡检系统,大风天气时,机巢晃动大的缺点,提出一种无人机巡检系统,可减小大风天气时机巢的晃动。
2、为实现上述目的,本发明采用如下技术方案:
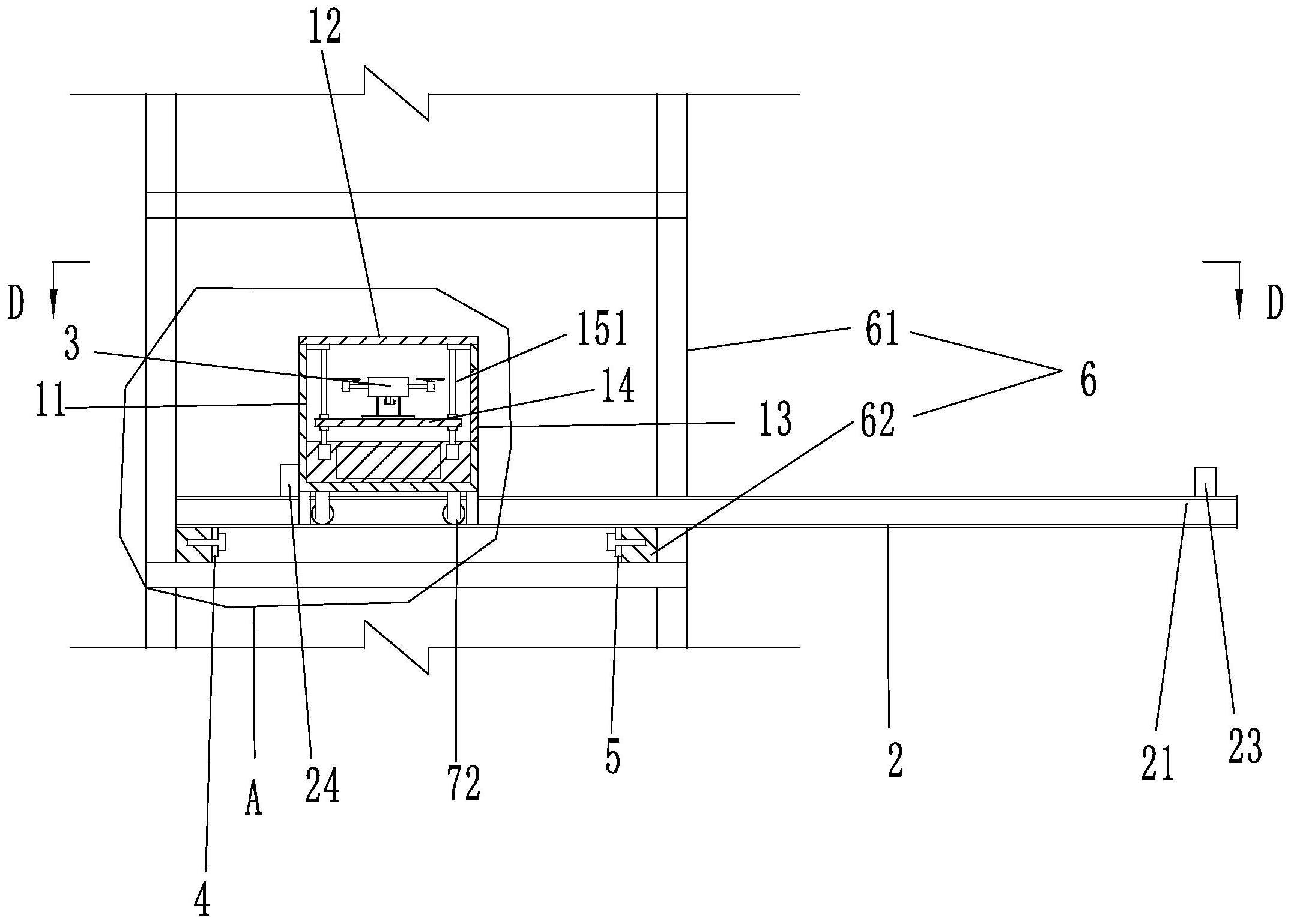
3、一种无人机巡检系统,包括机巢、导轨和可在机巢中起降的无人机,导轨的下侧设置有第一连接部和第二连接部,导轨穿过电力塔,第一连接部和第二连接部可拆卸连接在电力塔的相对两侧,导轨的一端延伸至电力塔外并悬空,机巢滑动连接在导轨上,机巢上设置有用于驱动机巢沿导轨运动的驱动机构,以及用于将机巢锁紧在导轨上的锁紧机构;无人机巡检系统包括起降状态和待机状态;无人机巡检系统处于起降状态时,锁紧机构将机巢锁紧在导轨的悬空端,机巢位于电力塔外,以防无人机起降时和电力塔产生干涉;无人机巡检系统处于待机状态时,无人机位于机巢内,锁紧机构将机巢锁紧在第一连接部和第二连接部之间,以减小机巢的晃动。
4、本申请中,当无人机巡检系统处于待机状态时,机巢移动至第一连接部和第二连接部之间,此处的导轨前后两侧通过第一连接部和第二连接部和电力塔连接,所以稳定性很好,在大风天气时,机巢不容易产生大的晃动,提高了机巢和无人机的安全性;另外,此时,机巢位于电力塔内部,可防止鸟类破坏机巢,也可防止鸟类在机巢上筑巢;当无人机需要起降时,机巢沿导轨移动至电力塔外侧,无人机起降时不容易和电力塔产生干涉。
5、进一步的,无人机包括无人机本体和转动连接在无人机本体下侧的摄像头,无人机本体内设置有控制器;机巢包括壳体和设置在壳体的盖板,壳体的一侧设置有透视窗口;无人机巡检系统处于待机状态时,透视窗口朝向导轨的悬空端,摄像头朝向透视窗口,以便透过透视窗口拍摄导轨,控制器接受摄像头的图像数据并可根据图像数据识别导轨上的鸟类,当控制器识别到鸟类时,控制器通过驱动机构驱动机巢向导轨的悬空端运动,以驱赶鸟类。
6、本申请中,当无人机巡检系统处于待机状态时,可利用无人机自带的摄像头对导轨进行监控,当监控到鸟类在导轨时,机巢可向导轨悬空端运动以驱赶鸟类,从而防止鸟类在导轨上筑巢。
7、进一步的,电力塔包括四根钢柱,钢柱之间固定连接有用于支撑导轨的横档,第一连接部为固定连接在导轨下侧的第一钢板,第一钢板通过螺栓和横档可拆卸连接,第二连接部为固定连接在导轨下侧的第二钢板,第二钢板通过螺栓和横档可拆卸连接。
8、进一步的,导轨设置为工字钢,导轨包括上下设置的上翼板和下翼板,上翼板通过腹板和下翼板固定连接,导轨的数量为两个,两个导轨相互平行;驱动机构包括固定连接在机巢下侧的支架、和支架转动连接的滚轮、设置在支架上并可驱动滚轮的第一电机;滚轮设置在上翼板和下翼板之间,滚轮和下翼板地接。
9、本申请中,通过第一电机和滚轮可驱动机巢沿导轨运动。
10、进一步的,壳体的下侧固定连接有用于清除导轨上的鸟巢的滑套,滑套设置有导向槽,导向槽呈t字型,上翼板和腹板穿过导向槽。
11、本申请中,当导轨上有鸟巢时,机巢沿导轨运动时,可通过滑套将导轨上的鸟巢除掉。
12、进一步的,锁紧机构为设置在滑套上的电缸,腹板上设置有第一限位孔和第二限位孔,第一限位孔和第二限位孔均可插入电缸的输出轴;无人机巡检系统处于起降状态时,电缸的输出轴插入第一限位孔;无人机巡检系统处于待机状态时,电缸的输出轴插入第二限位孔。
13、进一步的,导轨的上侧固定连接有第一限位块和第二限位块,机巢设置在第一限位块和第二限位块之间;无人机巡检系统处于起降状态时,机巢和第一限位块抵接;无人机巡检系统处于待机状态时,机巢和第二限位块抵接。
14、通过上述设置,方便本申请切换状态,使机巢运动时能较好的运动到位。
15、进一步的,机巢还包括供无人机起降的停机坪,以及用于驱动停机坪上下运动的升降机构。
16、本申请中,无人机在起降时,盖板打开,升降机构驱动停机坪向上运动,停机坪靠近壳体的上沿,防止无人机在起降时,无人机和壳体之间产生干涉,当无人机落到停机坪上后,升降机构驱动停机坪向下运动,使无人机进入壳体内,最后盖板关闭。
17、进一步的,升降机构包括竖向转动连接在壳体内的丝杆,以及用于驱动丝杆转动的第二电机,丝杆和停机坪螺纹连接。
18、通过上述设置,当第二电机驱动丝杆转动时,丝杆和停机坪相对转动,停机坪将向上或向下运动。
技术特征:
1.一种无人机巡检系统,其特征在于,包括机巢、导轨和可在所述机巢中起降的无人机,所述导轨的下侧设置有第一连接部和第二连接部,所述导轨穿过电力塔,所述第一连接部和所述第二连接部可拆卸连接在所述电力塔的相对两侧,所述导轨的一端延伸至所述电力塔外并悬空,所述机巢滑动连接在所述导轨上,所述机巢上设置有用于驱动所述机巢沿所述导轨运动的驱动机构,以及用于将所述机巢锁紧在所述导轨上的锁紧机构;
2.根据权利要求1所述的一种无人机巡检系统,其特征在于,所述无人机包括无人机本体和转动连接在所述无人机本体下侧的摄像头,所述无人机本体内设置有控制器;
3.根据权利要求1所述的一种无人机巡检系统,其特征在于,所述电力塔包括四根钢柱,所述钢柱之间固定连接有用于支撑所述导轨的横档,所述第一连接部为固定连接在所述导轨下侧的第一钢板,所述第一钢板通过螺栓和所述横档可拆卸连接,所述第二连接部为固定连接在所述导轨下侧的第二钢板,所述第二钢板通过螺栓和所述横档可拆卸连接。
4.根据权利要求2所述的一种无人机巡检系统,其特征在于,所述导轨设置为工字钢,所述导轨包括上下设置的上翼板和下翼板,所述上翼板通过腹板和所述下翼板固定连接,所述导轨的数量为两个,两个所述导轨相互平行;
5.根据权利要求4所述的一种无人机巡检系统,其特征在于,所述壳体的下侧固定连接有用于清除所述导轨上的鸟巢的滑套,所述滑套设置有导向槽,所述导向槽呈t字型,所述上翼板和所述腹板穿过所述导向槽。
6.根据权利要求5所述的一种无人机巡检系统,其特征在于,所述锁紧机构为设置在所述滑套上的电缸,所述腹板上设置有第一限位孔和第二限位孔,所述第一限位孔和所述第二限位孔均可插入所述电缸的输出轴;
7.根据权利要求1所述的一种无人机巡检系统,其特征在于,所述导轨的上侧固定连接有第一限位块和第二限位块,所述机巢设置在所述第一限位块和所述第二限位块之间;
8.根据权利要求2所述的一种无人机巡检系统,其特征在于,所述机巢还包括供所述无人机起降的停机坪,以及用于驱动所述停机坪上下运动的升降机构。
9.根据权利要求8所述的一种无人机巡检系统,其特征在于,所述升降机构包括竖向转动连接在所述壳体内的丝杆,以及用于驱动所述丝杆转动的第二电机,所述丝杆和所述停机坪螺纹连接。
技术总结
本发明公开了一种无人机巡检系统,包括机巢、导轨和可在机巢中起降的无人机,导轨的下侧设置有第一连接部和第二连接部,导轨穿过电力塔,第一连接部和第二连接部可拆卸连接在电力塔的相对两侧,机巢上设置有用于驱动机巢沿导轨运动的驱动机构,以及用于将机巢锁紧在导轨上的锁紧机构;无人机巡检系统包括起降状态和待机状态;无人机巡检系统处于起降状态时,锁紧机构将机巢锁紧在导轨的悬空端,机巢位于电力塔外,以防无人机起降时和电力塔产生干涉;无人机巡检系统处于待机状态时,无人机位于机巢内,锁紧机构将机巢锁紧在第一连接部和第二连接部之间,以减小机巢的晃动。本发明提出一种无人机巡检系统,可减小大风天气时机巢的晃动。
技术研发人员:吕湛,倪利,王桥,童啸霄,黄阳,马军强,王竹莲,徐则仕,裘金洋,吴园东
受保护的技术使用者:国网浙江省电力有限公司嵊州市供电公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!