一种航天器姿态控制及RCS优化分配方法
本发明涉及航天器控制,特别是涉及一种航天器姿态控制及rcs优化分配方法。
背景技术:
1、随着科学技术的迅速发展,人们对外太空领域探知的需求不断增加,越来越多的研究开展需要航天器的精准控制。姿控分系统作为航天器最为重要的系统之一,需要给航天器提供稳定精准的姿态控制,以供航天器能够完成各种各样的空间任务,促进于国家航天事业的发展。
2、理论上,传统的航天器姿态控制方法的收敛时间是无限远的,且无法确定最终的姿态跟踪误差范围,这显然并不适用于工程的实际应用,会给航天器的在轨操作带来困难和挑战。同时,传统的姿态控制方法中为了应对较大的扰动,常常会设置较大的控制器增益,这无疑会加剧抖振问题的影响。绝大多数针对航天器姿态控制的研究中,并不会考虑控制指令分配的问题,而许多航天器的姿态控制需要许多组反作用控制系统(reactioncontrol system,rcs)来实现,如何实现rcs的优化控制分配也是一个当前工程实际中面临的问题。
技术实现思路
1、本发明实施例的目的是提供一种航天器姿态控制及rcs优化分配方法,实现了航天器姿态在有限时间内的精准跟踪控制,优化了指令误差最小和能量消耗综合最优的控制分配。
2、为实现上述目的,本发明实施例提供了如下方案:
3、一种航天器姿态控制及rcs优化分配方法,所述航天器姿态控制及rcs优化分配方法是基于航天器的预定性能进行操作,包括:
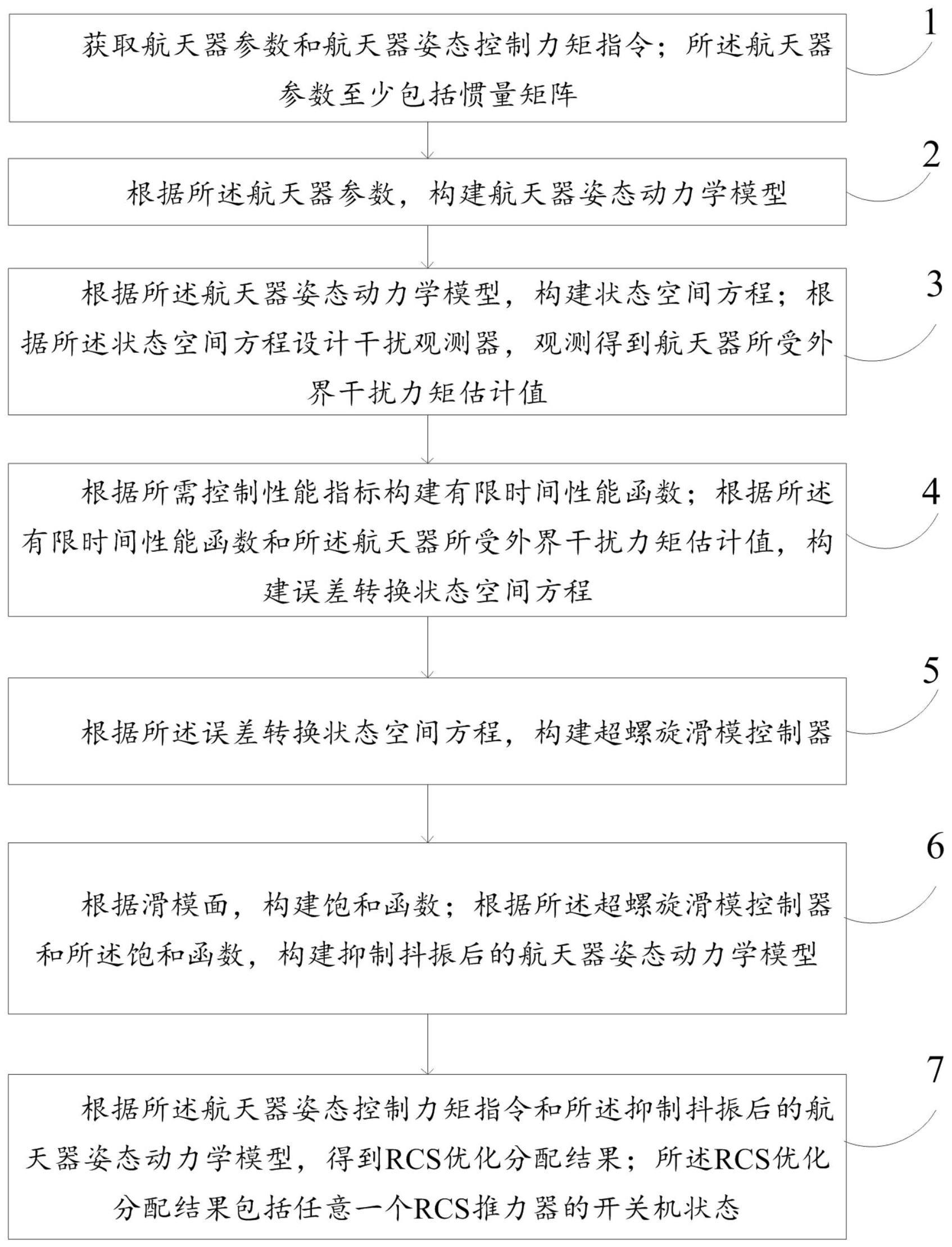
4、获取航天器参数和航天器姿态控制力矩指令;所述航天器参数至少包括惯量矩阵;
5、根据所述航天器参数,构建航天器姿态动力学模型;
6、根据所述航天器姿态动力学模型,构建状态空间方程;根据所述状态空间方程设计干扰观测器,观测得到航天器所受外界干扰力矩估计值;
7、根据所需控制性能指标构建有限时间性能函数;根据所述有限时间性能函数和所述航天器所受外界干扰力矩估计值,构建误差转换状态空间方程;
8、根据所述误差转换状态空间方程,构建超螺旋滑模控制器;
9、根据滑模面,构建饱和函数;根据所述超螺旋滑模控制器和所述饱和函数,构建抑制抖振后的航天器姿态动力学模型;
10、根据所述航天器姿态控制力矩指令和所述抑制抖振后的航天器姿态动力学模型,得到rcs优化分配结果;所述rcs优化分配结果包括任意一个rcs推力器的开关机状态。
11、可选地,根据所述航天器参数,构建航天器姿态动力学模型,具体包括:
12、
13、
14、其中,表示惯性系下的滚转,ψ表示惯性系下的俯仰,γ表示惯性系下的偏航角,θ∈r3×1表示航天器姿态角,表示θ的一阶导数,表示ω的一阶导数,ω∈r3×1表示航天器姿态角速度,m为航天器所受的三轴力矩;
15、根据所述航天器姿态动力学模型,构建状态空间方程,具体包括:
16、
17、
18、a=-j-1ω×j;
19、b=j-1;
20、其中,x1=θ,x2=ω,a和b表示等式符号,表示x2的一阶导数,表示x2的一阶导数,u∈r3×1表示控制力矩,d∈r3×1表示所述航天器所受外界干扰力矩估计值。
21、可选地,根据所述状态空间方程设计干扰观测器,观测得到航天器所受外界干扰力矩估计值,具体包括:
22、
23、其中,la=diag(la1 la2 la3)>0;kai=diag(kai1 kai2 kai3),i=1,...,4;κai,αa均为预计参数;ex2=x2-x2d;x1d表示所述航天器姿态控制力矩指令x1的指令值;x2d表示所述航天器姿态控制力矩指令x2的指令值;函数sigr(x)=|x|r·sgn(x);
24、参数σ=diag(σ1 σ2 σ3),定义如下:
25、
26、其中,taj为正切换时间参数。
27、可选地,根据所需控制性能指标构建有限时间性能函数,具体包括:
28、ρfv(t)=av3t4+av2t3+av1t2+cvρrt+cvρ0;
29、其中,av3、av2与av1的表达式分别为:
30、
31、其中,参数cvρ0、cvρr、ρfv∞与tfv均为预计参数,t表示时间;cvρ0为正数,表示初始误差界限,cvρr表示性能函数初始变化方向,ρfv∞表征函数ρfv(t)的稳态收敛值,tfv表示ρfv(t)收敛至稳态值ρfv∞的设定时间。
32、可选地,根据所述有限时间性能函数和所述航天器所受外界干扰力矩估计值,构建误差转换状态空间方程,具体包括:
33、
34、
35、
36、其中,ξ表示转换误差,表示ξ的一阶导数,表示的一阶导数,q和p表示等式符号,为所述有限时间性能函数误差上限系数,δ为所述有限时间性能函数误差下限系数;
37、根据所述误差转换状态空间方程,构建超螺旋滑模控制器,具体包括:
38、
39、
40、其中,x'1=ξ,表示x′1的一阶导数,表示x′2的一阶导数,表示由向量q构成的对角矩阵,表示x1d的二阶导数。
41、可选地,
42、所述超螺旋滑模控制器中滑模面s为:
43、s=cx'1+x'2;
44、超螺旋趋近律为:
45、
46、
47、
48、其中,为s的一阶导数,c为预计参数,x′1、x′2和v为等式符号;k1,k2为控制器增益,为v的一阶导数;ud表示控制输出指令,表示干扰观测器观测总扰动;
49、根据滑模面,构建饱和函数,具体包括:
50、
51、其中,δ为预设参数。
52、可选地,
53、根据所述航天器姿态控制力矩指令和所述抑制抖振后的航天器姿态动力学模型,得到rcs优化分配结果,具体包括:
54、
55、mrcs=fir;
56、其中,mrcs表示rcs提供力矩,md表示所述航天器姿态控制力矩指令,α为表示权值系数,q1∈r3×3和q2∈rm×m为预设正定矩阵;fi表示rcs所提供力矩的系数矩阵,r=[r1,r2,...,rm]t表示m个rcs推力器的开关机状态,ri只能取0或1。
57、在本发明实施例中,构建有限时间性能函数,根据有限时间性能函数和航天器所受外界干扰力矩估计值,构建误差转换状态空间方程;预定性能的控制方法通过将原跟踪误差转换为无约束误差,从而最终满足一些设定好的控制性能指标,能够实现航天器姿态有限时间内的精准跟踪控制。根据误差转换状态空间方程,构建超螺旋滑模控制器;超螺旋滑模控制能够有效的应对较大的干扰且不会带来严重的抖振现象,能够同时实现指令误差最小和能量消耗综合最优的控制分配优化。
技术特征:
1.一种航天器姿态控制及rcs优化分配方法,其特征在于,所述航天器姿态控制及rcs优化分配方法是基于航天器的预定性能进行操作,包括:
2.根据权利要求1所述的航天器姿态控制及rcs优化分配方法,其特征在于,根据所述航天器参数,构建航天器姿态动力学模型,具体包括:
3.根据权利要求2所述的航天器姿态控制及rcs优化分配方法,其特征在于,根据所述状态空间方程设计干扰观测器,观测得到航天器所受外界干扰力矩估计值,具体包括:
4.根据权利要求1所述的航天器姿态控制及rcs优化分配方法,其特征在于,根据所需控制性能指标构建有限时间性能函数,具体包括:
5.根据权利要求2所述的航天器姿态控制及rcs优化分配方法,其特征在于,根据所述有限时间性能函数和所述航天器所受外界干扰力矩估计值,构建误差转换状态空间方程,具体包括:
6.根据权利要求5所述的航天器姿态控制及rcs优化分配方法,其特征在于,
7.根据权利要求6所述的航天器姿态控制及rcs优化分配方法,其特征在于,
技术总结
本发明公开航天器姿态控制及RCS优化分配方法,涉及航天器控制技术领域。获取航天器参数和航天器姿态控制力矩指令;构建航天器姿态动力学模型;根据航天器姿态动力学模型构建状态空间方程;根据状态空间方程得到航天器所受外界干扰力矩估计值;根据有限时间性能函数和航天器所受外界干扰力矩估计值构建误差转换状态空间方程;根据误差转换状态空间方程构建超螺旋滑模控制器;根据超螺旋滑模控制器和饱和函数构建抑制抖振后的航天器姿态动力学模型;根据航天器姿态控制力矩指令和抑制抖振后的航天器姿态动力学模型得到RCS优化分配结果。本发明实现了航天器姿态在有限时间内的精准跟踪控制,优化了指令误差最小和能量消耗综合最优的控制分配。
技术研发人员:丁一波,毕诚,岳晓奎,李文博,张海博,黄盘兴
受保护的技术使用者:西北工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!