航空器浮水控制系统、方法、设备及存储介质与流程
本发明涉及无人驾驶航空器,尤其涉及一种航空器浮水控制系统、方法、设备及计算机可读存储介质。
背景技术:
1、目前,当无人驾驶航空器在水面区域上方运行时,若遇突发情况,触发应急降落时,只能降落在陆地区域,而无法降落在水面区域。其中,导致应急降落触发的应急降落条件包括但不限于:卫星导航失效、视觉导航失效、部分动力设备受损或失效、气压计异常或失效、imu(inertial measurement unit,惯性测量单元)异常或失效、动力电量不足时以及航空器结构受损等。此时,航空器无法返航、也无法降落至备降点,而只能迫降于水面区域。
2、综上所述,如何实现无人驾驶航空器在水面区域迫降后的安全漂浮,成为目前亟待解决的技术问题。
技术实现思路
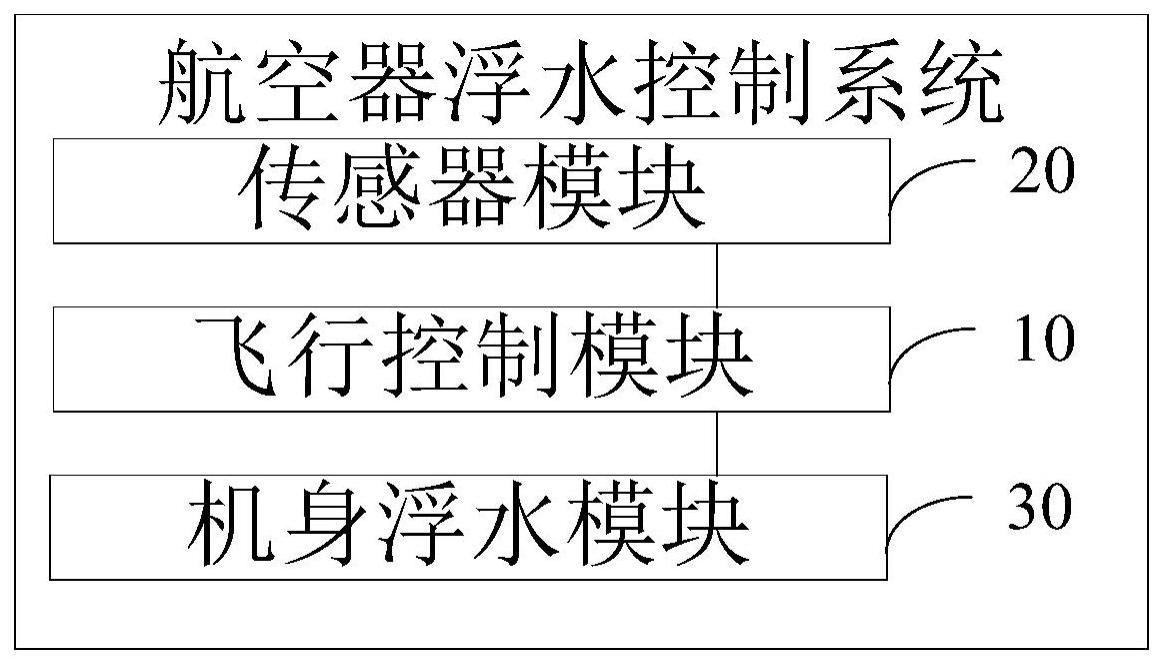
1、为了解决现有技术中的上述技术缺陷,本发明提出了一种航空器浮水控制系统,该系统包括飞行控制模块以及与所述飞行控制模块连接的传感器模块和机身浮水模块,所述机身浮水模块包括气囊,其中:
2、所述飞行控制模块用于在预设的紧急降落程序触发时,向所述传感器模块发送预设的数据获取指令;
3、所述传感器模块用于根据所述数据获取指令采集航空器与水面的高度数据以及所述航空器的液体侵入量,并将所述高度数据和/或所述液体侵入量发送至所述飞行控制模块;
4、所述飞行控制模块还用于当监测到所述高度数据和/或所述液体侵入量满足预设的高度条件和/或侵入量条件时,向所述机身浮水模块发送气囊充气指令;
5、所述机身浮水模块用于根据所述气囊充气指令控制所述气囊进行充气。
6、可选地,所述机身浮水模块包括第一浮水模块和第二浮水模块,其中,所述第一浮水模块包括高压气罐和第一气囊,所述第二浮水模块包括电动充气泵和第二气囊;
7、所述机身浮水模块还用于根据所述气囊充气指令控制所述高压气罐对所述第一气囊进行充气和/或控制所述电动充气泵对所述第二气囊进行充气。
8、可选地,所述第一浮水模块还包括与所述高压气罐相连的气罐压力传感器、与所述气罐压力传感器相连的第一总气管、与所述第一总气管相连的第一电控阀门开关、与所述第一电控阀门开关相连的第一单向止逆阀、与所述第一单向止逆阀相连的第一分气管、与所述第一分气管相连的所述第一气囊以及包含于所述第一气囊内的第一气囊压力传感器和第一泄压阀。
9、可选地,所述第二浮水模块还包括与所述电动充气泵相连的第二气管、与所述第二气管相连的第二单向止逆阀、与所述第二单向止逆阀相连的所述第二气囊以及包含于所述第二气囊内的第二气囊压力传感器和第二泄压阀。
10、可选地,所述飞行控制模块还用于在所述紧急降落程序触发时,向所述传感器模块发送预设的降落水面检测指令;
11、所述传感器模块根据所述降落水面检测指令获取所述航空器当前的位置数据和高度数据,并将所述位置数据和所述高度数据发送至所述飞行控制模块;
12、所述飞行控制模块还用于根据所述位置数据和/或所述高度数据确定所述航空器当前的降落水面类型,其中,所述降落水面类型包括海洋水面和内陆水面。
13、可选地,所述飞行控制模块还用于:
14、在确定所述降落水面类型为海洋水面时,根据监测到的所述高度数据和/或所述液体侵入量生成所述气囊充气指令;
15、在确定所述降落水面类型为内陆水面时,根据监测到的当前海拔数据、所述高度数据和/或所述液体侵入量生成所述气囊充气指令。
16、可选地,所述传感器模块包括卫星定位系统、雷达传感器、加速度计、气压传感器、视觉传感器以及液位传感器,其中:
17、所述卫星定位系统、雷达传感器、加速度计、气压传感器以及视觉传感器中的一种或多种用于获取所述当前海拔数据和所述高度数据;
18、所述液位传感器用于获取所述液体侵入量。
19、本发明还提出了一种航空器浮水控制方法,该方法应用于所述航空器浮水控制系统,该方法包括:
20、当航空器的飞行控制模块检测到预设的紧急降落程序触发时,通过所述飞行控制模块向所述航空器的传感器模块发送预设的数据获取指令;
21、当所述传感器模块根据所述数据获取指令采集到所述航空器与水面的高度数据以及所述航空器的液体侵入量时,将所述高度数据和/或所述液体侵入量发送至所述飞行控制模块;
22、当所述飞行控制模块监测到所述高度数据和/或所述液体侵入量满足预设的高度条件和/或侵入量条件时,向所述航空器的机身浮水模块发送气囊充气指令;
23、所述机身浮水模块根据所述气囊充气指令控制所述气囊进行充气。
24、本发明还提出了一种航空器浮水控制设备,该设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如上所述的航空器浮水控制方法的步骤。
25、本发明还提出了一种计算机可读存储介质,该计算机可读存储介质上存储有航空器浮水控制程序,航空器浮水控制程序被处理器执行时实现如上所述的航空器浮水控制方法的步骤。
26、实施本发明的航空器浮水控制系统、方法、设备及计算机可读存储介质,通过提出一种航空器浮水控制系统,该系统包括飞行控制模块以及与所述飞行控制模块连接的传感器模块和机身浮水模块,所述机身浮水模块包括气囊,其中:所述飞行控制模块用于在预设的紧急降落程序触发时,向所述传感器模块发送预设的数据获取指令;所述传感器模块用于根据所述数据获取指令采集航空器与水面的高度数据以及所述航空器的液体侵入量,并将所述高度数据和/或所述液体侵入量发送至所述飞行控制模块;所述飞行控制模块还用于当监测到所述高度数据和/或所述液体侵入量满足预设的高度条件和/或侵入量条件时,向所述机身浮水模块发送气囊充气指令;所述机身浮水模块用于根据所述气囊充气指令控制所述气囊进行充气。本发明实现了一种无人驾驶航空器在水面区域迫降后的安全漂浮控制方案,扩展了航空器的迫降范围,提升了水面迫降时的安全性和成功率。
技术特征:
1.一种航空器浮水控制系统,其特征在于,所述系统包括飞行控制模块以及与所述飞行控制模块连接的传感器模块和机身浮水模块,所述机身浮水模块包括气囊,其中:
2.根据权利要求1所述的航空器浮水控制系统,其特征在于,所述机身浮水模块包括第一浮水模块和第二浮水模块,其中,所述第一浮水模块包括高压气罐和第一气囊,所述第二浮水模块包括电动充气泵和第二气囊;
3.根据权利要求2所述的航空器浮水控制系统,其特征在于,所述第一浮水模块还包括与所述高压气罐相连的气罐压力传感器、与所述气罐压力传感器相连的第一总气管、与所述第一总气管相连的第一电控阀门开关、与所述第一电控阀门开关相连的第一单向止逆阀、与所述第一单向止逆阀相连的第一分气管、与所述第一分气管相连的所述第一气囊以及包含于所述第一气囊内的第一气囊压力传感器和第一泄压阀。
4.根据权利要求2所述的航空器浮水控制系统,其特征在于,所述第二浮水模块还包括与所述电动充气泵相连的第二气管、与所述第二气管相连的第二单向止逆阀、与所述第二单向止逆阀相连的所述第二气囊以及包含于所述第二气囊内的第二气囊压力传感器和第二泄压阀。
5.根据权利要求1所述的航空器浮水控制系统,其特征在于,所述飞行控制模块还用于在所述紧急降落程序触发时,向所述传感器模块发送预设的降落水面检测指令;
6.根据权利要求5所述的航空器浮水控制系统,其特征在于,所述飞行控制模块还用于:
7.根据权利要求6所述的航空器浮水控制系统,其特征在于,所述传感器模块包括卫星定位系统、雷达传感器、加速度计、气压传感器、视觉传感器以及液位传感器,其中:
8.一种航空器浮水控制方法,应用于所述航空器浮水控制系统,其特征在于,所述方法包括:
9.一种航空器浮水控制设备,其特征在于,所述设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如权利要求8所述的航空器浮水控制方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有航空器浮水控制程序,所述航空器浮水控制程序被处理器执行时实现如权利要求8所述的航空器浮水控制方法的步骤。
技术总结
本发明公开了一种航空器浮水控制系统、方法、设备及计算机可读存储介质,其中,该系统包括飞行控制模块以及与所述飞行控制模块连接的传感器模块和机身浮水模块,所述机身浮水模块包括气囊,其中,所述传感器模块用于根据所述数据获取指令采集航空器与水面的高度数据以及所述航空器的液体侵入量;所述飞行控制模块用于当监测到所述高度数据和/或所述液体侵入量满足预设的高度条件和/或侵入量条件时,向所述机身浮水模块发送气囊充气指令;所述机身浮水模块用于根据所述气囊充气指令控制所述气囊进行充气。本发明实现了一种无人驾驶航空器在水面区域迫降后的安全漂浮控制方案,扩展了航空器的迫降范围,提升了水面迫降时的安全性和成功率。
技术研发人员:胡华智,任智鹏
受保护的技术使用者:亿航智能设备(广州)有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!