一种两栖救生机器人
本发明涉及水面救援设备,具体是涉及一种两栖救生机器人。
背景技术:
1、相比陆地,水上救援更具挑战性,特别是时间紧迫,落水人员若超过5分钟仍未获救,生命将面临巨大威胁。在救援过程中,稍有不慎或体力不支,都可能导致溺水事故的发生。
2、目前,现有的水上救生机器人多采用u型救生圈结构或救生舰,但这两种结构仅能在水面上展开,容易受到水面情况的影响,抗风浪能力较差,电能和速度也有限。此外,它们对被救者的使用姿势有一定要求,增加了救援所需的时间。
3、因此,需要重新设计一种更高效的水上救生机器人。
技术实现思路
1、(一)要解决的技术问题
2、本发明主要针对以上问题,提出了一种两栖救生机器人,其目的是解决现有的水上救援机器人容易受水面情况影响的问题。
3、(二)技术方案
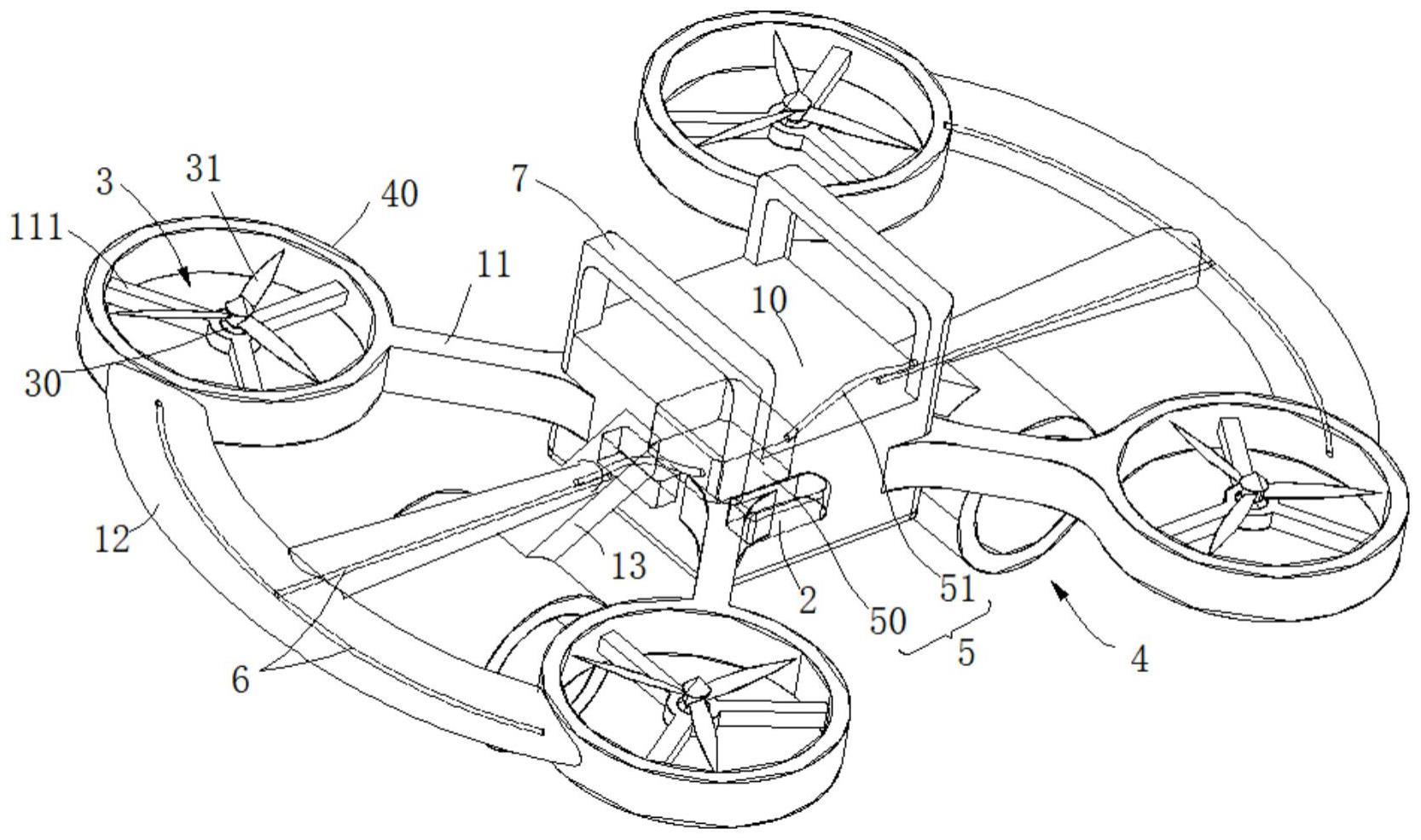
4、为实现上述目的,本发明提供了一种两栖救生机器人,包括机身以及设置于所述机身内的供电单元,所述机身包括主壳体和多个第一支臂壳体,所述第一支臂壳体从所述主壳体的侧壁延伸出来,且所述第一支臂壳体上设置有旋翼组件;所述机身还包括多个浮力臂和多个第二支臂壳体,所述第二支臂壳体从所述主壳体的侧壁延伸出来,且所述第二支臂壳体上设置有推进器,所述供电单元与所述旋翼组件和推进器连接,用以提供电能,所述浮力臂与所述主壳体和/或第一支臂壳体连接。
5、进一步地,所述浮力臂为充气臂,所述机身内还设置有充气单元,所述充气单元包括气泵和输气管道,所述气泵与所述供电单元相连,由所述供电单元提供所述电能,所述输气管道一端连接所述气泵,另一端与所述充气臂相连。
6、进一步地,所述充气臂内设置有刚性支撑件,所述刚性支撑件与所述机身固定连接。
7、进一步地,所述主壳体的上壁设置有抓握扶手。
8、进一步地,所述主壳体的侧壁延伸设置有四个第一支臂壳体形成对称的x形刚体结构,在所述x形刚体结构的四个末端位置均设置所述旋翼组件,所述x形刚体结构具有两个对称设置的安装区域和两个对称设置的抓握区域,所述第二支臂壳体和浮力臂均设置在安装区域。
9、进一步地,所述第一支臂壳体的末端延伸形成环形的侧壁保护罩,所述侧壁保护罩的内壁设置有多个安装条,多个所述安装条沿侧壁保护罩中心延伸形成安装结构,所述旋翼组件被置于所述侧壁保护罩之内,所述旋翼组件包括驱动电机和桨叶,所述桨叶安装在所述驱动电机的旋转轴上,所述驱动电机安装在所述安装结构上。
10、进一步地,所述浮力臂内设置有压力传感器,所述机身内还设置有控制系统,所述控制系统连接到充气单元中的气泵,所述压力传感器连接所述控制系统,所述压力传感器通过测量充气臂内的气体压力,并将该信息传递给控制系统,所述控制系统使用该信息控制所述气泵。
11、进一步地,所述推进器位于主壳体左右两边呈对称设置,并设有保护罩。
12、(三)有益效果
13、与现有技术相比,本发明提供的一种两栖救生机器人,通过将多旋翼无人机作为主体,并结合水下推进器,实现了飞行和水面行动的双重功能。该机器人由机身组成,包括主壳体和多个第一支臂壳体,第一支臂壳体上设有旋翼组件。此外,机身还包括多个浮力臂和多个第二支臂壳体,第二支臂壳体上设置有推进器,供电单元与旋翼组件和推进器连接,提供电能。浮力臂与主壳体和/或第一支臂壳体相连,提供浮力支持。这样设计的救生机器人能够在空中飞行并快速到达落水人员位置,在水面上让人员抓住机器人中部,通过推进器将其带至陆地,大大缩短了救援时间,提高成功率。
技术特征:
1.一种两栖救生机器人,包括机身以及设置于所述机身内的供电单元,所述机身包括主壳体和多个第一支臂壳体,所述第一支臂壳体从所述主壳体的侧壁延伸出来,且所述第一支臂壳体上设置有旋翼组件;其特征在于,所述机身还包括多个浮力臂和多个第二支臂壳体,所述第二支臂壳体从所述主壳体的侧壁延伸出来,且所述第二支臂壳体上设置有推进器,所述供电单元与所述旋翼组件和推进器连接,用以提供电能,所述浮力臂与所述主壳体和/或第一支臂壳体连接。
2.根据权利要求1所述的一种两栖救生机器人,其特征在于,所述浮力臂为充气臂,所述机身内还设置有充气单元,所述充气单元包括气泵和输气管道,所述气泵与所述供电单元相连,由所述供电单元提供所述电能,所述输气管道一端连接所述气泵,另一端与所述充气臂相连。
3.根据权利要求2所述的一种两栖救生机器人,其特征在于,所述充气臂内设置有刚性支撑件,所述刚性支撑件与所述机身固定连接。
4.根据权利要求1所述的一种两栖救生机器人,其特征在于,所述主壳体的上壁设置有抓握扶手。
5.根据权利要求1所述的一种两栖救生机器人,其特征在于,所述主壳体的侧壁延伸设置有四个第一支臂壳体形成对称的x形刚体结构,在所述x形刚体结构的四个末端位置均设置所述旋翼组件,所述x形刚体结构具有两个对称设置的安装区域和两个对称设置的抓握区域,所述第二支臂壳体和浮力臂均设置在安装区域。
6.根据权利要求1所述的一种两栖救生机器人,其特征在于,所述第一支臂壳体的末端延伸形成环形的侧壁保护罩,所述侧壁保护罩的内壁设置有多个安装条,多个所述安装条沿侧壁保护罩中心延伸形成安装结构,所述旋翼组件被置于所述侧壁保护罩之内,所述旋翼组件包括驱动电机和桨叶,所述桨叶安装在所述驱动电机的旋转轴上,所述驱动电机安装在所述安装结构上。
7.根据权利要求2所述的一种两栖救生机器人,其特征在于,所述浮力臂内设置有压力传感器,所述机身内还设置有控制系统,所述控制系统连接到充气单元中的气泵,所述压力传感器连接所述控制系统,所述压力传感器通过测量充气臂内的气体压力,并将该信息传递给控制系统,所述控制系统使用该信息控制所述气泵。
8.根据权利要求1所述的一种两栖救生机器人,其特征在于,所述推进器位于主壳体左右两边呈对称设置,并设有保护罩。
技术总结
本发明涉及水面救援设备技术领域,具体是涉及一种两栖救生机器人。包括机身以及设置于所述机身内的供电单元,所述机身包括主壳体和多个第一支臂壳体,所述第一支臂壳体从所述主壳体的侧壁延伸出来,且所述第一支臂壳体上设置有旋翼组件;所述机身还包括多个浮力臂和多个第二支臂壳体,所述第二支臂壳体从所述主壳体的侧壁延伸出来,且所述第二支臂壳体上设置有推进器,所述供电单元与所述旋翼组件和推进器连接,用以提供电能,所述浮力臂与所述主壳体和/或第一支臂壳体连接。这样设计的救生机器人能够在空中飞行并快速到达落水人员位置,在水面上让人员抓住机器人中部,通过推进器将其带至陆地,大大缩短了救援时间,提高成功率。
技术研发人员:刘兴超,杨大伟,李冬冬,解峥
受保护的技术使用者:哈尔滨工业大学重庆研究院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!